原子力显微镜轻敲模式实验中力的重构外文翻译资料
2022-07-30 17:32:14

英语原文共 12 页,剩余内容已隐藏,支付完成后下载完整资料
原子力显微镜轻敲模式实验中力的重构
摘要
快速、准确且稳定的纳米力学测量在材料科学、应用物理学和分子生物学等领域被广泛研究。在表征处于液体和气体环境中的材料表面时,振幅调制原子力显微镜(轻敲模式)是最常用的纳米材料表面表征技术。然而,与其高空间分辨率和稳定性相比,其定量化功能还有待发展。 我们发展了一种将测量值转化为定量化力测量的一般方法,这种力重构算法基于测量值(振幅和相移)是针尖和表面距离缓慢变化函数的假设推导获得的。其准确性和适用性通过数值模拟和实验进行了验证。这种方法在液体和空气、小自由振幅和大自由振幅、柔性和坚硬材料及保守和非保守力的条件下均适用。
关键词:原子力显微镜,原子力显微镜轻敲模式,力重构
引言
原子力显微镜(AFM)的发展[1],是从高空间分辨率的成像技术[2-7]向空间分辨的力学或化学特性成像进行转变的[8-15]。 这些图像可在生命科学中用以了解蛋白质弹性和生物功能之间的关系[14,16]; 在聚合物科学用以开发新的超薄聚合物共混物[17]; 或在生物医学中用于生成恶性细胞和组织的指纹图谱[18]。 力学和化学性质可由力-距离曲线推导出。 获得力-距离曲线的标准方法,需涉及原子力显微镜静态配置。 这种方法需要记录悬臂偏移量与表面不同坐标位置(x,y)的针尖和表面距离的关系[14-19]。由于该方法测量的是准静态平衡的力;故只能测量保守力或粘附回滞力。
原子力显微镜的轻敲模式,亦即振幅调制原子力显微镜(AM-AFM),仍是处于气体和液体中的表面的纳米级表征的最广泛使用的方法。此外,通过振幅反馈回路[4,5]与其他进程的结合,已经同时实现了高速与高分辨率成像。AM-AFM在提供异质表面的组成对比图像和测量能量耗散[21,22]方面已经很成功,然而,该技术不支持测相互作用力。因此,它不能直接测量诸如刚度,弹性模量或粘弹性系数等参数[23]。而频率调制原子力显微镜则不同,它在十几年前已经拥有支持获取相互作用力的功能[24,25]。
事实上,AM-AFM在一些方面仍有待发展,特别是在将测量值换算为定量的力[26-31],以及如何减少成像过程中针尖的磨损[32]等方面。在原子力显微镜动态配置的实验中,力不可直接测量,因为测量值是在一个或几个振动周期内所取的平均值[20,33]。因此,测量值只能是探针和样品距离的函数,而不是瞬时针尖和表面距离的函数。后者是与力曲线的确定相关的距离(见图1)。
原子力显微镜轻敲模式可确定作用在针尖上的力的原理具有基础而实际的应用。通过这些原理,可以知道上述技术本身的局限性。一般认为不能在吸引和排斥相互作用的转换[20]下还原整个力曲线[33]。另一方面,如果在原子力显微镜轻敲模式实验中也能得到力曲线,那么纳米力学谱测试领域将得到扩充和简化。
我们首先了解由传统的AM-AFM(单频率)还原力的方法。这些方法可大致分为两类:(i)通过测量时变位移来恢复时变力[34-37](这些方法中的数据是在探针和表面的间距固定时记录的);(ii)对于给定的探针和表面的距离,提供在稳态振动周期针尖和表面距离最近处的力值[38-41]。然后对不同的探针和表面的距离重复该过程,从而获得整个力曲线。
第一类方法依赖于高次谐波和悬臂传递函数的确定。 这些方法的精度对谐波的数量的依赖性很强。 一般来说,若要使重构的力达到要求,谐波数需大于20。 此外,高分辨率成像不支持产生高于噪声电平的谐波分量。 扭转谐波原子力显微镜提供了一种替代方案[37,42,43]来解决上述问题,需要修改仪器并使用针尖偏离主悬臂轴线的特殊悬臂。 前述方法在探针和表面的距离固定时重构力曲线。 基于互调激励的力重构法也可归于第一类方法[26,27,44]中,因为也需要探针和表面间隔固定,并且需要测量数个频率分量。
第二类方法首先要求解由位力(同相)方程和能量平衡(正交)方程所得的积分方程[45]。 求解积分方程包括几个中间步骤和近似的方法,例如根据拉普拉斯变换[39]表示力,或者以第一类切比雪夫多项式[40]展开力的表达式。 两种情况都需要确定大量参数,因而这些方法难以实现。Holscher方法考虑到,在振幅调制模式中,振幅比针尖和样品相互作用距离的范围更大,从而简化了积分方程[38,46],而Katan等人的方法[41]是基于频率调制和振幅调制原子力显微镜测量值之间一一对应的关系,但缺乏严谨的证明。 最近,Platz等人引入了一种力重构方法,该方法包含了这两类方法的一些共同特点[47]。
我们提出的这个力重构方法在小幅和大幅振动、气体和液体、柔性和坚硬材料以及保守和非保守的相互作用等条件下均适用,是具有普遍性的。 该方法基于假设振动的振幅和相移是随探针和表面距离的缓慢变化的函数。该方法对于任何探针和表面的距离,都假定正弦稳态解,并假定在探针和表面距离变化时,针尖运动保持其简谐形式(正弦曲线)。这样, 针尖对探针和表面距离变化的响应,以及对相互作用力的响应都可由振幅和相移的变化所反映。
2. 理论
我们通过缓慢变化的近似的假设,并结合位力耗散方程,导出两个与力-距离关系无关的积分方程。通过使用拉普拉斯变换[48]、修正的贝塞尔函数以及分数次积分和微分[49]等方法来求解积分方程。
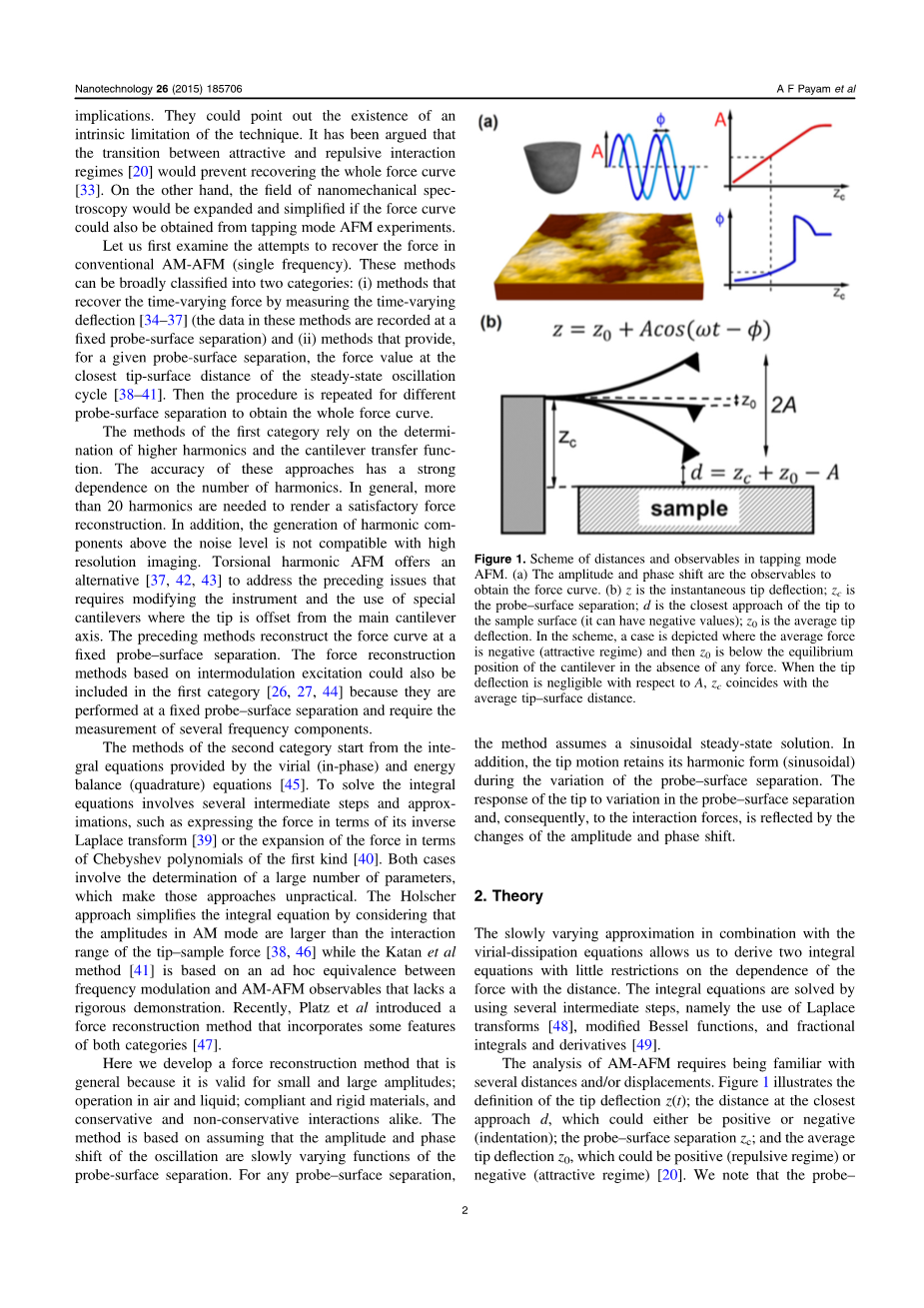
分析AM-AFM需要明确以下几个不同的距离和位移的概念。 如图1所示,图中定义了针尖偏移量z(t);最近距离d,(可以是正或负(嵌入));探针和表面的间距zc;平均针尖位移z0(可以是正(排斥状态)或负(吸引状态))[20]。 我们注意到,当z0相对于A可忽略不计时,探针和表面距离将与针尖和表面距离的平均值一致。
用该方法进行实验,需要获得振幅和相移随针尖和表面距离变化的关系。 这些曲线分别称为振幅(相位)曲线。 在该过程中,由于压电陶瓷(z压电)的作用△z,针尖靠近表面时振动(在固定的横向位置)。 这使得探针和表面距离发生变化。 z压电位移的频率在1-10Hz的范围,而针尖振动频率在10-400kHz的范围内。 因此可以近似地认为,在曲线所示的所有情况下,针尖都已取得了稳态解。
现将悬臂针尖系统视为受保守力Fc和非保守力Fnc的阻尼-质点振动系统
(1)
(2)
不妨设稳态解为
(3)
图 1 原子力显微镜轻敲模式距离和观测量示意图。(a)振幅和相移是观测量,从而得到力曲线;(b)z是针尖瞬时位移,zc是探针和表面的间隔,d是针尖到表面最近的距离(可负),z0为针尖平均偏移量量。有一种情况下平均力为负值(吸引),此时z0在悬臂不受任何力时低于悬臂的平衡位置。当针尖位移相对于A可忽略时,zc与针尖和表面的平均距离相同。
其中,和Phi;分别为振幅和相移;和分别是(角)共振频率和驱动频率;和分别是悬臂针尖系统的倔强系数和品质因子;是驱动力,是平均针尖位移。我们假设相对于可被忽略。
在记录振幅和相移曲线的过程中,尽管在△t的时间间隔内,探针和表面间距从变为时,A和Phi;都缓慢变化,我们依然假设振动仍保持由方程(3)给出的形式。 再假设和之差远小于振幅。由前面的假设得
(4)
(5)
将方程(4)和(5)代入方程(1)并结合位力方程和能量平衡,我们得到两个积分方程。 由位力原理可推出保守力的表达式,根据在一个周期上能量平衡可推出非保守力的表达式。
(6a)
(6b)
(7a)
(7b)
这里
(8)
(9)
其中,是自由振动振幅,。 接下来对简化后的方程(6b)和(7b)进行说明。推导前述等式的中间步骤见附录。
式(6)和(7)用针尖和表面最近时的距离表出振动中保守力部分和非保守力部分。 对于每个,输入数据是和Phi;。 在每个未简化的等式中,等号右边都是三个积分之和。 这些积分的含义及其关系将在后续章节中讨论。
参数渐变方法曾用于计算力的平均值[28],从而在反馈控制下得到悬臂的状态空间模型[50],或讨论具有不同反馈体系的高分辨率成像[51]。
3. 方法
可用如下方法进行误差分析:(i)记录针尖表面模型的力值(ii)将其用于求解运动方程的数值解。 从而我们能够得到A和Phi;关于针尖和表面距离的函数。 (iii)将章节2中推导的振幅和相移曲线代入等式(6)和(7)中,构建力重构曲线。 最后,理论值与实际值进行比较。 另一方面,由实验数据的导出的力可验证该理论的合理性,但在常规双模态力谱测量进行测试时,其测量纳米力学的数据不够准确。
3.1. 模拟
式(1)的数值解由四阶龙格-库塔法得出。 对两个不同的悬臂,一个在气体钟模拟,另一个在水中模拟。 悬臂的共振频率、倔强系数和品质因子在气体条件的值分别为300kHz,30N/m和300,在水中分别为30kHz,1N/m及2。对于针尖和样品的相互作用,我们模拟了四个不同的针尖-表面情况(例I-IV),这些例子的特征量为杨氏模量Es,Hamaker常数H和泊松比nu;。 例I:Es = 10GPa,H = 10-19J,nu;= 0.4,Rtip = 2nm。 例II:Es = 0.1GPa,H = 10-20J,nu;= 0.35,Rtip = 5nm。 例III:Es = 10GPa,H = 0J,nu;= 0.4,Rtip = 2nm。 例IV:Es = 0.1GPa,H = 0J,nu;= 0.35,Rtip = 5nm。 为了模拟气体中的耗散力,我们设Es = 100MPa,H = 0.5times;10-20J,nu;= 0.4,A0 = 10nm,eta;= 100Pa·s,Rtip = 5nm。在液体中,Es = 100MPa,H = 0J,nu;= 0.4,A0 = 10nm,eta;= 100Pa·s,Rtip = 5nm。 对于所有情况,针尖的弹性模量Etip = 160GPa,nu;= 0.45。 设分子间距离为0.165nm。
3.2. AFM测量
使用Cypher(Asylum Research Inc.)获得AFM数据。 在空气中,我们使用PPP-NCLAuD悬臂(纳米传感器),Q = 440,k = 22.4 N m-1,第一谐振频率f0 = 150.418 kHz。 在水中,我们使用PPP-NCSTAuD悬臂梁(纳米传感器),Q = 5.4,k = 6.5 N m-1,f0 = 60.41 kHz。 通过在与实验相同的介质中的坚硬表面(云母)上获取静态和动态曲线来确定光学杠杆灵敏度。 使用热测法在距离和样品表面相对近的距离(3mu;m)处测量Q和f0。
3.3. 聚合物样品
在由聚苯乙烯(PS)区域(EPSasymp;2.0GPa)和聚烯烃弹性体(乙烯-辛烯共聚物)区域(LDPE)(ELDPEasymp;0.1GPa)制成的聚合物
全文共19750字,剩余内容已隐藏,支付完成后下载完整资料
资料编号:[143182],资料为PDF文档或Word文档,PDF文档可免费转换为Word



