小型电动物流叉装车臂架系统设计毕业论文
2020-02-17 10:56:31
摘 要
本次设计首先通过分析现有伸缩臂式叉装车的结构与功能,类比一台伸缩臂叉车,设计出一个物流叉车的伸缩臂。然后对伸缩臂进行受力分析和应力校核,检验设计合理性。接着在Pro/E5.0软件中,对伸缩臂进行建模,对每一节臂进行有限元分析,分析每级臂的应力大小和应力分布,对伸缩臂进行结构优化。最终对伸缩臂进行运动仿真,分析伸缩臂的运动情况,检验伸缩臂的运动情况。本设计主要是针对小型电动物流叉装车,设计其臂架系统,最终结合组内其他同学的设计,完成整个小型电动物流叉装车的设计。
本文最终设计出一个全伸状态为10m,全缩状态为4.5m的截面形状为六边形,厚度为6mm的三节伸缩臂,经过受力分析,应力校核,有限元分析和结构改进,最终结果表明设计合格,可以达到设计要求。
关键词:伸缩臂;设计计算;三维建模;有限元分析;运动仿真;
Abstract
Firstly, by analyzing the structure and function of the existing telescopic forklift truck, this design analogizes a telescopic forklift truck, and designs a telescopic arm of logistics forklift truck. Then the force analysis and stress checking of the telescopic arm are carried out to verify the rationality of the design. Then, in Pro/E5.0 software, the telescopic arm is modeled, the finite element analysis of each arm is carried out, the stress magnitude and distribution of each arm are analyzed, and the structure of the telescopic arm is optimized. Finally, the motion of the telescopic arm is simulated, the motion of the telescopic arm is analyzed, and the motion of the telescopic arm is checked. This design is mainly aimed at small electric logistics forklift truck,designed its boom system, and finally combined with the design of other students in the group, completed the design of the whole small electric logistics forklift truck.
In this paper, a three-section telescopic boom with a full-extension state of 10m, a full-shrinkage state of 4.5m and a thickness of 6mm is designed. After stress analysis, stress checking, finite element analysis and structural improvement, the final results show that the design is qualified and can meet the design requirements.
Key Words:telescopic jib;design and calculation;3D modeling;finite element analysis motion simulation.
目录
第1章 绪论 1
1.1 伸缩臂物流叉装车 1
1.2 伸缩臂叉车国内外现状分析 1
1.3 伸缩臂叉车未来趋势 2
1.4 课题研究内容与预期目标 3
第2章 小型电动叉装车伸缩臂设计 5
2.1 伸缩臂长度设计 5
2.2 伸缩臂截面设计 6
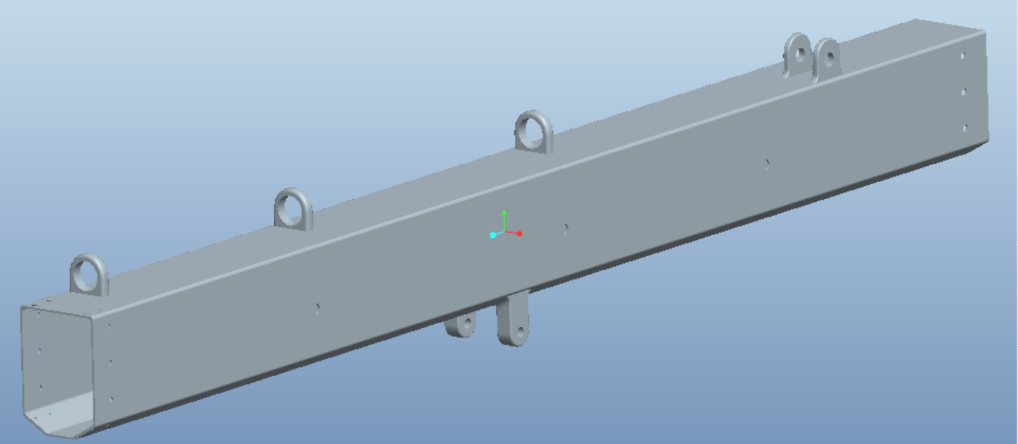
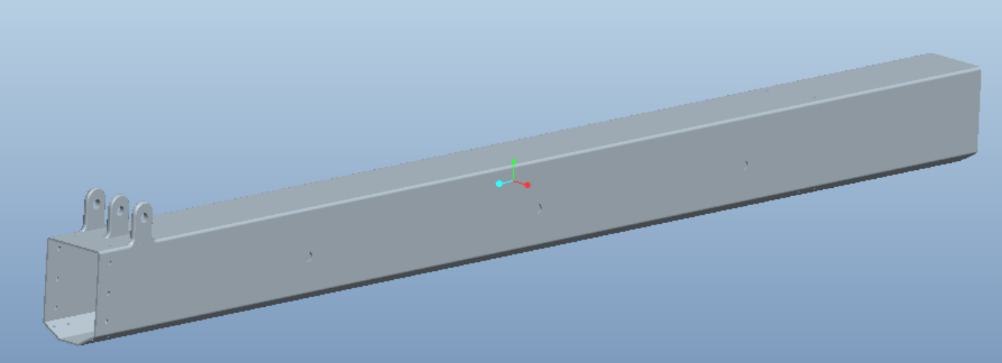
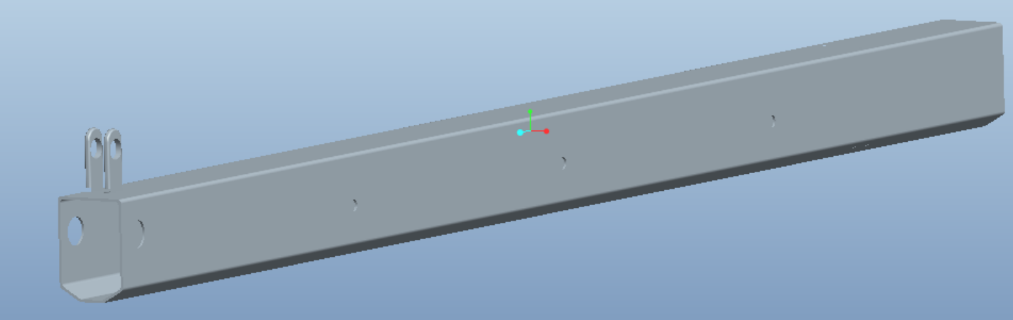
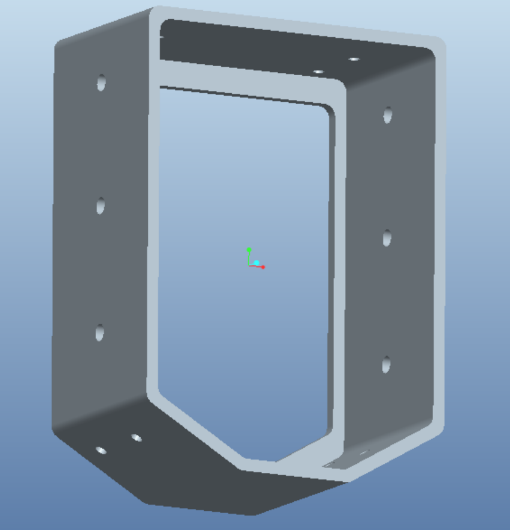
2.3 伸缩臂主要零部件设计 7
2.4伸缩臂质量计算 8
第3章.伸缩臂受力分析与校核 10
3.1 伸缩臂受力分析 10
3.2 伸缩臂弯曲应力校核 11
3.2.1 主臂截面:截面外六边形相关计算 11
3.2.2 二级臂截面:截面外六边形相关计算 12
3.2.3 一级臂截面:截面外六边形相关计算 12
3.2.4 伸缩臂许用应力 12
3.2.5 危险截面弯曲正应力 13
3.2.6 伸缩臂在全缩状态的受力分析 13
第4章伸缩臂建模与有限元分析 14
4.1 Pro/E介绍 14
4.2 构建伸缩臂模型 14
4.3 伸缩臂模型有限元分析 18
4.3.1 有限元分析 18
4.3.2 伸缩臂有限元分析 18
4.3.3 改进和再分析 21
第5章 伸缩臂运动仿真 26
5.1 运动仿真 26
5.2 伸缩臂运动仿真 26
5.2.1 Pro/E运动仿真 26
5.2.2 伸缩臂运动仿真步骤与结果 26
第6章 结论与展望 31
6.1 结论 31
6.2 展望 31
参考文献 33
致谢 34
第1章 绪论
1.1 伸缩臂物流叉装车
随着世界经济平稳增长,人民生活水平显著提高,网购成为了越来越多的人的主要购物方式,相对的,物流叉车的需求量也越来越多。国内由于淘宝和京东的飞速发展,再加上各种节日的优惠活动,使得网购交易额越来越高,中国物流叉车的销售量因此也越来越多,统计数据显示,2018年度,中国叉车全年总销量高达597152台,我国再一次成为叉车生产和销售全球第一的国家。
物流叉车,是一种可以实现对货物进行搬运,堆砌和运输的特种车辆。安装不同的作业属具,叉车可以实现叉,铲,吊等多种功能。伸缩臂叉车,是将起重机的伸缩臂和叉装车的装卸结合在一起,利用伸缩臂伸高,伸远的特点,使得作业效率大大提高[1]。具有四轮驱动,四轮转向,蟹行,整车调平等功能的底盘的叉车,越野性能很好,因此可以运用于更加复杂困难的作业环境,既可以军用,也可以民用,既可以在城市中作为物流车,也可以在挂接各种田间作业机具,在农村作业。
1.2 伸缩臂叉车国内外现状分析
上个世纪70年代,欧美国家的农业,畜牧业和码头航运业等发展迅速,传统叉车无法满足当时的需求,因此伸缩臂叉车应运而生。由于伸缩臂叉车的优点,使其在市场上广受青睐。2016年,全球销售的伸缩臂叉装车中,欧洲占53%,北美洲占35%,亚太区占3%,国外知名伸缩臂叉装车公司全球市场占额达到93%。目前欧洲超过60%的伸缩臂叉装车采用液压传动系统,可以灵活的布置泵和马达等部件。这种传动系统可以使传动效率大大提高,并且可以在速度范围内实现无极变速,不用停车换挡。英国JBC工程机械公司,在2016年发布了集静液压和动力换挡变速箱优点的JBC AGR1 Pro,具有良好的低速操作性,易驱动性,高驱动效率。2016年,法国曼尼通集团发布了全新农业伸缩臂叉装车MLT NEW Ag。同年,法国欧力胜集团在上海宝马展上展出了HTL4014。如今,外国的伸缩臂叉车已经形成系列化的产品,起升高度可达24.6米,起重重量42.5T。国外有较高的工业水平,并且有很大的市场,因此伸缩臂叉装车在研究不断深入。产品逐渐开始多样化、生产配套体系也渐渐完善,通过加装各种功能,采用各种新技术,产品性能已大大提高。
国内伸缩臂叉装车的研究起步较晚,但经过国内人员不断地的努力,湖南山河智能、广西柳工、徐工集团等企业逐步研发出系列化的伸缩臂叉装车,提升高度17m,额定负荷4500kg[2]。国内一些研究所,在伸缩臂叉装车的基础上,也研制出了一些特殊装备。2010年,詹阳动力重工研制出了高速伸缩臂叉装车,2012年,徐工生产的伸缩臂叉装车开始出口,2016年华南重工完成对360度旋转多功能HNTR401旋转型伸缩臂叉装车的性能试验,2017年,华南重工第一台11吨带履带侧移HNBZ8512型伸缩臂扒渣叉车交付使用,2016年中国市场高空平台的业务增长达到35%,远超全球其他区域市场。但由于国内对于伸缩臂叉装车的研究时间较短,研发水平不足,一些关键核心部件仍然进口。虽已初步具有系列化产品,但由于价格昂贵导致市场份额较低,产品研发进度缓慢。
国内伸缩臂叉装车虽已慢慢变得系列化,但不能实现应用在不同行业,不同领域和不同工作环境中。同时,属具的快速更换技术——液压快换装置,也是国内伸缩臂叉装车的研究方向。在全球性环境问题突发,人们环保意识增强的今天,绿色环保已成为伸缩臂叉装车发展的必然趋势。可持续发展的观念,将在功能,设计,材料上体现出来。设计过程中应该更加注重产品的维修,调整和重复利用,使后续的各种过程和环节对环境的危害降到最低。
1.3 伸缩臂叉车未来趋势
随着经济的发展,伸缩臂叉装车的使用环境会愈发恶劣。全球环境问题的影响,工程机械不仅要绿色环保,而且要提高效率降低能耗。工程机械的机器人化不仅能很好的解决这个问题,还可以处理一些高精度,高难度的问题,并且在一些比较危险工作环境,如果机器人化的工程机械可以代替工人操作,安全度则会大大提高。因此,机器人化工程机械,也是工程机械以后的发展方向。
伸缩臂叉装车的机器人化,就是使用一些机器人相关技术,使伸缩臂叉装车智能化。伸缩臂叉装车机器人化的关键技术有货物自动叉装装置,自诊断技术,GPS导航定位技术,轨迹规划技术和远程通信监控技术[3]。
国内机器人化工程机械在20世纪90年代才开始发展。由于工程机械前沿技术都掌握在日,美,俄等西欧发达国家手中,在我国发展初期,主要以引进发达国家设备和技术,进行学习和借鉴。经过国家的支持和帮助,我国工程机械智能化,机器人化的技术水平开始慢慢提高。随着我国经济发展,开始研发自己国家的技术与设备,在国家政策的大力支持下,已慢慢接近国际水平。近年来,工程机械机器人化不断发展,慢慢开始应用于实践阶段。通过无线电遥控器操纵装载机到危险地带作业,利用无人驾驶自卸车在1000m深坑中进行多项工作,在部分推土机上安装GPS,在观察地形、施工环境的前提下, 用机械代替人工施工,能出色地完成任务。虽然我国工程机械机器人化技术发展迅速,但许多尖端和高新技术还没有掌握,如计算机,微电子,传感器技术等。
国外工程机械机器人技术较成熟,已经作为标准设备被广泛使用,瑞典的ABB Robotices,日本的FANAC,Yaskawa,德国的KUKA Roboter,美国的Adept Technology,American Robot,Emerson Industrial Automation,S-T Robotics,这些公司已成为其所在地区支柱性产业[4]。他们的机器人化工程机械都有自主研发的科研成果,垄断了许多高尖端技术,目前在工程机械智能化信息化领域都有优秀的成果,如美国的D4R推土机,是首款有低废气排放装置的推土机。德,美,意,日等发达国家,不仅人均工业机械机器人数量位于世界前列,并且在国际工程机械市场的比重也非常大。
各国对于工程机械机器人都非常重视,在政策和资金方面都给与了大力支持。近年来,工程机械机器人开始智能化,模块化和系统化国外发展趋势为性能提高,价格降低,机械结构模块化,可重构化,控制系统越来越开放化,传感器越来越重要,虚拟现实技术开始用于过程控制,人机交互控制兴起。国内工程机械机器人虽然在一些关键技术方面有所突破,但尚未掌握核心技术。我国大部分工程机械机器人都为进口,因此,研究制造自己的工程机械机器人变得愈发重要。我国准备在2012~2020年,基本普及数控化,在一些领域实现产业化的智能生产,准备转变我国制造模式;2021~2030年,全面实现数字化,在一些主要领域全面推行智能制造,在工程机械高端制造业的国际市场中,基本形成竞争优势[4]。接下来几年,我国将会把重点放在工程机械智能化方面,形成自己的技术体系,并在实践中逐渐应用。
1.4 课题研究内容与预期目标
通过了解伸缩臂叉装车在国内外的研究现状和发展趋势,伸缩臂叉装车未来的市场与前景非常广阔,我国加快对伸缩臂叉装车的研制是非常重要的。本文通过分析现在国内外市场对伸缩臂叉装车的需求,类比国外伸缩臂叉装车参数,设计出一台小型伸缩臂叉装车上的伸缩臂臂架系统。
本文主要研究内容如下:
1.借鉴一台载荷为3000kg的小型伸缩臂叉装车,设计一个额定载荷为3000kg的伸缩臂臂架系统,并进行受力分析和应力校核。
2.在Pro/E中对伸缩臂进行建模,完成伸缩臂的三维模型。
3.在Pro/E中对伸缩臂进行有限元分析即应力分析,分析了每节臂的应力分布与最大应力,对伸缩臂进行结构改进。
4.在Pro/E中对伸缩臂进行运动学仿真,分析伸缩臂的运动,检验伸缩臂设计是否合理。
本设计研究目标为设计出一个额定载荷为3000kg的伸缩臂叉装车的伸缩臂,建立伸缩臂的三维模型。对伸缩臂进行校核和应力分析,然后对伸缩臂进行结构改进,最终完成伸缩臂的运动动画。绘制出伸缩臂装配图和主要零件的二维图。
第2章 小型电动叉装车伸缩臂设计
本次设计包括:伸缩臂臂长,伸缩臂截面以及伸缩臂主要零部件。通过对各级臂的长度设计和选择特定的截面,使伸缩臂满足其工作要求。通过对伸缩臂各主要零部件的设计和安装布置,为接下来的有限元分析和运动仿真做准本。根据设计要求,选定伸缩臂的额定载荷为3000Kg,类比伸缩臂叉装车麦力MANITOU MT-X 1030 ST,选定伸缩臂全伸工作状态最大臂长为10米,承载能力850kg,全缩状态最小臂长为4.5米,伸缩臂为三节臂。
2.1 伸缩臂长度设计
伸缩臂长度设计是小型电动叉装车伸缩臂设计的基础。因此,伸缩臂的全伸长度和全缩长度就尤为重要。本叉装车伸缩臂设计主要是通过类比法国曼尼通公司的,伸缩臂叉装车麦力MANITOU MT-X 1030 ST,参考一些数据后进行设计,前文已选定伸缩臂为三节臂,全伸状态为10米,全缩状态为4.5米。全伸状态臂长即最大臂长,等于主臂长度与各级臂外伸长度之和,全缩状态臂长即最小臂长,为主臂长度与各级臂前段间距之和。本文伸缩臂各级臂的编号为,最大的臂为主臂,从主臂往左数分别为二级臂,一级臂。伸缩臂全缩状态的设计方案选择为主臂前一级臂缩回至回转中心前,不搭接平衡臂。
相邻臂总长(除主臂长度外)之间的相互关系[5]:
= (2.1)
其中:为第i级臂总长度,单位为mm;
为第i级臂减速机的安装尺寸,即全缩时,第i级臂与第i 1级臂前端的间距,单位为mm,具体数值以经验和结构而定;
为第i级伸缩臂上浮动滚轮的安装尺寸,即全缩时,i级臂与i 1级臂后端的间距,单位为mm,具体数值以经验和结构而定;
基本参数 | 各级臂 | 一级臂 | 二级臂 |
n=2 | 0.2 | ||
n=3 | 0.2 | 0.25 |
表2.1 长度设计基本参数表
主臂Lz与(n-1)级臂长度关系为[5]:
=Lz (2.2)
为主臂前一级臂缩回至立柱回转中心以前,与立柱中心间距
以上是毕业论文大纲或资料介绍,该课题完整毕业论文、开题报告、任务书、程序设计、图纸设计等资料请添加微信获取,微信号:bysjorg。
相关图片展示: