电动车辆稳定性控制(EVSC)系统设计方案研究毕业论文
2020-02-17 10:56:22
摘 要
随着能源的问题,环境的问题以及汽车的安全性问题越来越严峻,在各国的政府和汽车企业的推动下电动汽车稳定性控制成为当今世界热门的发展方向。本文以四轮独立驱动控制的电动汽车为研究对象,对其行驶过程中的稳定性进行了分析。
本文主要研究了在转向工况下电动汽车的驱动力控制问题。首先,参考建立传统汽车相关模型的经验,在Simulink中搭建整车模型、二自由度模型和电机模型,并建立Carsim中建立整车模型对Simulink整车模型进行了仿真验证。
其次,对于汽车在行驶过程中失去稳定性的原因进行了分析,介绍了几种汽车稳定性控制方法的原理,并选择直接横摆力矩控制(Direct yam control,DYC)作为本文提升汽车稳定性的控制方法,分析了横摆角速度对汽车稳定性的影响,并将其作为控制变量。
然后,基于分层思想,设计了一种分层控制器,上层通过PID控制器控制,以二自由度模型的横摆角速度为参考标准,以整车模型和二自由度模型横摆角速度的差值为输入,输出是使汽车保持稳定的附加横摆力矩,下层控制器的作用是将上层输出的附加横摆力矩进行优化分配,以轮胎纵向力利用率平方和最小为优化目标,并以电机输出条件和路面附着条件进行约束,将优化结果通过电机输送给整车模型执行,完成稳定性控制。
最后,基于上述建立的整车模型、二自由度模型、电机模型和控制器模型所所构成的闭环控制系统并结合Carsim整车模型,选取前轮转角为阶跃输入和正弦输入的仿真工况对电动汽车的稳定性进行了仿真分析。
研究结果表明:本文所设计的稳定控制系统降低了汽车在转向工况下横摆角速度的值,有效地改善了汽车行驶过程中的稳定性。
关键词:四轮独立驱动电动汽车;稳定性控制;直接横摆力矩控制;优化分配;
Abstract
With the problem of energy, environment and automobile safety becoming more and more serious, the stability control of electric vehicles has become a hot development direction in the world under the promotion of governments and automobile enterprises in various countries. In this paper, four-wheel independent drive control of electric vehicles as the research object, the stability of its driving process is analyzed.
This paper mainly studies the driving force control of electric vehicles under steering conditions. Firstly, referring to the experience of establishing traditional automobile related models, the whole vehicle model, two-degree-of-freedom model and motor model are built in Simulink, and the whole vehicle model in Carsim is established to simulate and verify the Simulink vehicle model.
Secondly, the reasons of vehicle losing stability in the course of driving are analyzed, the principles of several vehicle stability control methods are introduced, and direct yaw moment control (DYC) is chosen as the control method to improve vehicle stability in this paper. The influence of yaw angular speed on vehicle stability is analyzed and used as the control variable. Then, based on the hierarchical idea, a hierarchical controller is designed. The upper layer is controlled by the PID controller, and the yaw angular velocity of the two-degree-of-freedom model is taken as the reference standard. The difference between the yaw angular velocity of the whole vehicle model and the two-degree-of-freedom model is taken as the input. The output is the additional yaw moment that keeps the vehicle stable. The lower layer controller is used to carry out the additional yaw moment of the upper layer output. The objective of optimization is to minimize the square sum of tire longitudinal force utilization ratio, and the motor output conditions and road adhesion conditions are constrained. The optimization results are conveyed to the vehicle model through the motor to complete the stability control.
Finally, based on the closed-loop control system composed of the vehicle model, the two-degree-of-freedom model, the motor model and the controller model, combined with the Carsim vehicle model, the stability of the electric vehicle is simulated and analyzed under the simulation conditions of step input and sinusoidal input of the front wheel angle.
The results show that the stability control system designed in this paper reduces the yaw angular velocity of the vehicle under steering conditions, and effectively improves the stability of the vehicle during driving.
Key words: four-wheel independent drive electric vehicle; stability control; direct yaw moment control; optimal allocation;
目 录
摘 要 I
Abstract II
第1章 绪论 1
1.1研究目的及意义 1
1.1.1电动汽车的研究目的及意义 1
1.1.2汽车稳定性控制的研究目的及意义 1
1.2电动汽车稳定性控制研究现状 2
1.2.1电动汽车横摆运动控制现状研究现状 2
1.2.2 电动汽车的控制策略及转矩优化分配研究现状 3
1.3主要研究内容 5
第2章 车辆动力学数学分析 6
2.1电动汽车整车动力学数学分析 6
2.1.1车身动力学模型 6
2.1.2轮胎模型 7
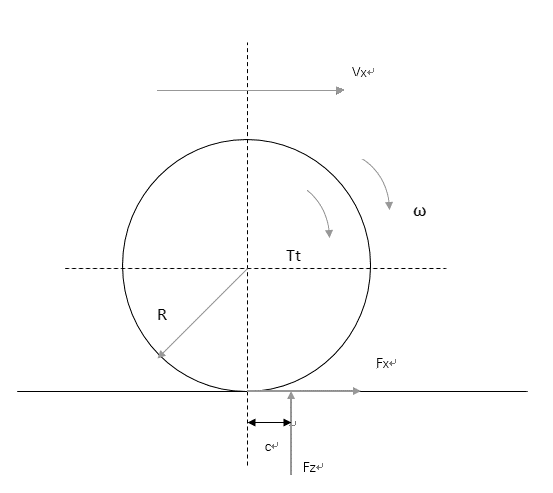
2.1.3车轮动力学模型 9
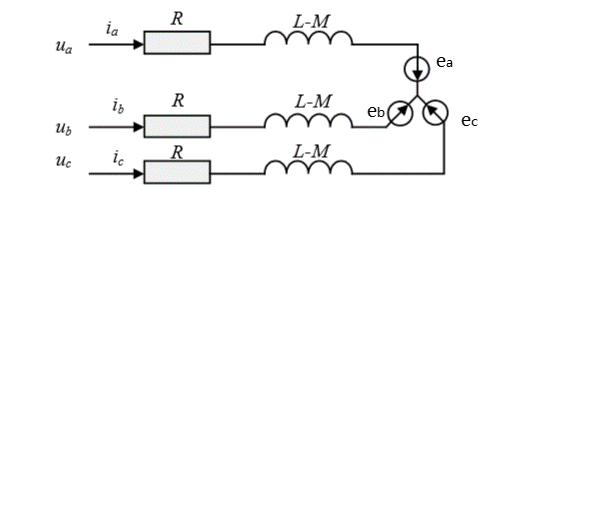
2.1.4电机模型 11
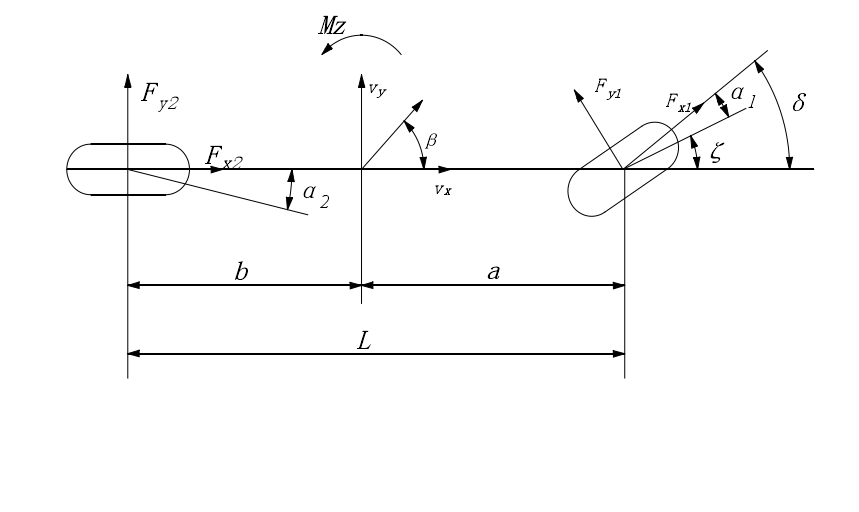
2.2理想线性二自由度模型的数学分析 12
2.3本章小结 14
第3章 Simulink整车和二自由度仿真模型的建立 15
3.1 Simulink简介 15
3.2模型在Simulink中的具体实现 15
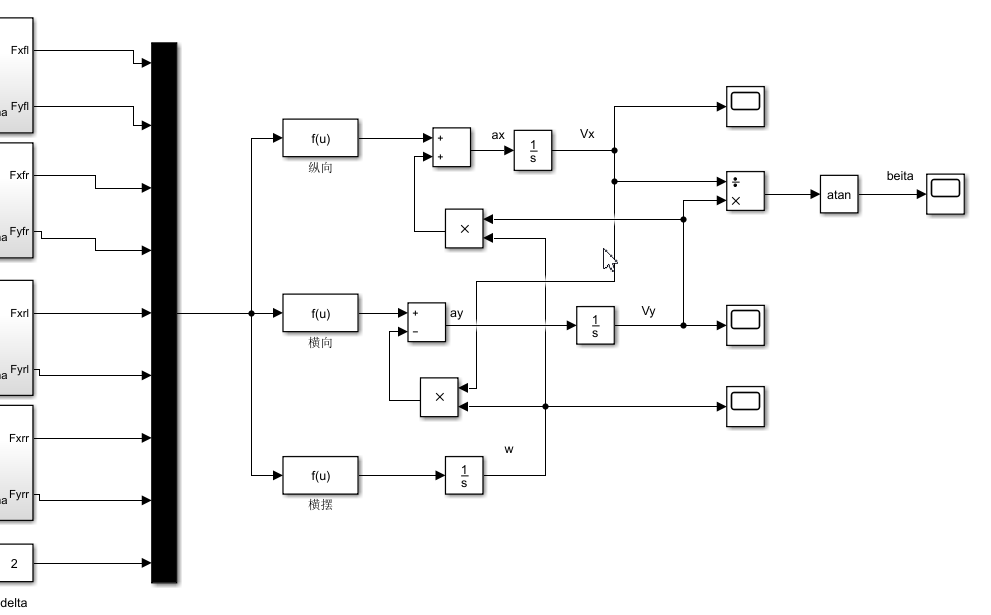
3.2.1车身动力学模型的建立 15
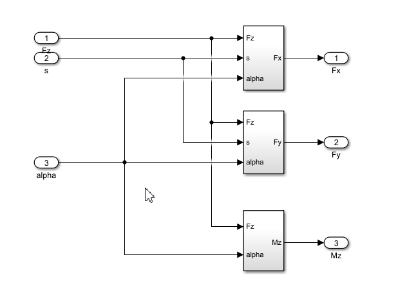
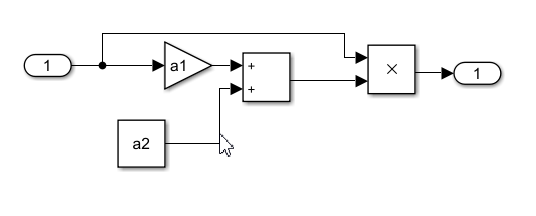
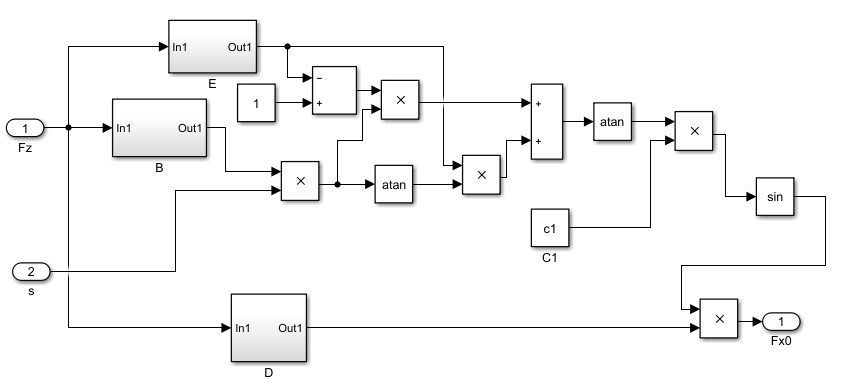
3.2.2魔术轮胎模型的建立 17
3.2.3车轮动力学模型的建立 19
3.2.4电机模型的建立 22
3.2.5理想线性二自由度模型的建立 22
3.3本章小结 23
第4章 整车模型的仿真验证 24
4.1 Carsim软件简介 24
4.2 Carsim整车模型的建立 24
4.3整车模型仿真验证 25
4.3本章小结 27
第5章 汽车稳定性控制原理的分析 28
5.1汽车失稳原因的分析 28
5.2汽车稳定性控制原理及种类 30
5.3控制变量的选取 32
5.3.1横摆角速度对汽车稳定性的影响 33
5.4控制变量理想值的确定 34
5.5本章小结 36
第6章 分层控制器的设计 37
6.1稳定性控制策略基本框架 37
6.2 PID控制 38
6.3上层控制器的设计 41
6.4下层控制器的设计 42
6.4.1驱动力约束条件 43
6.4.2驱动力优化分配 43
6.5控制器模型的建立 46
6.6本章小结 48
第7章 控制系统仿真分析 49
7.2 控制系统模型 50
7.3阶跃输入工况仿真 50
7.4正弦输入工况仿真 52
7.5本章小结 55
第8章 全文总结与展望 56
8.1全文总结 56
8.2研究展望 57
参考文献 58
致 谢 60
第1章 绪论
1.1研究目的及意义
1.1.1电动汽车的研究目的及意义
1886年,汽车诞生,至今已经有100多年的发展历史,随着社会科学技术的不断发展和人们生活的需要,汽车已经开始从人们的代步工具逐渐演变成为人类生活不可或缺的一部分,汽车工业的发展日益成为一个国家综合实力的评价指标。
任何事物的发展都具有两面性。汽车在发展的同时,也带了在生活中我们能真真切切感觉得到的一些问题。首先是环保问题,近几年,在国家层面尤其加强了对环境的监管和惩罚措施,习总书记所提出“绿水青山就是金山银山”的理念更加凸显了保护环境的重要性;其次是能源问题,我国虽然国土面积较大,但已探明的石油、天然气资源储量相对不足,人均拥有量相当于世界平均水平的50%,主要还是依赖于进口才能满足能源需求。
随着能源危机和环境污染问题的日益严重,国内外许多研究机构和汽车生产厂商开始致力于电动汽车的研究[1]。电动汽车相比于传统汽车具有如下优势:
(1)与传统内燃机相比,在结构上,以电机代替发动机,结构相对来说变得简单,提高了传递效率。
(2)在舒适性方面,电动汽车运转及其平稳的电机可以解决发动机工作时所带来的噪声和振动。
(3)在环保方面,电动汽车实现了零排放,无污染,减缓能源危机,促进人与自然和谐相处,对于环境保护具有重大的意义。
随着电动汽车关键技术的和基础设施的日出完善,促使世界各国纷纷加入抢占电动汽车技术和市场的行列[2]。据统计,在2016年,中国已占全球电动汽车销量的40%,跻身全球最大电动汽车市场。电动汽车代表了未来的发展方向,具有良好的发展前景。
1.1.2汽车稳定性控制的研究目的及意义
除了上述汽车的发展所带来的环境问题和能源问题,还带来了跟人们息息相关的安全问题。特别是当今汽车的各项性能得到了巨大的提升,公路上的汽车越来越多,汽车的车速越来越快,但同样不可避免的,我国的交通事故也越来越多,据不完全统计,我国每年交通事故的死亡人数高达数百万[3],给家庭和社会带来了不可估量的损失,因此,汽车的安全问题越来越得到大家的关注。
汽车的行驶安全可以分为两类:主动安全和被动安全。顾名思义,主动安全是在事故发生之前汽车主动起作用来避免事故的发生,例如现在汽车普遍应用的ABS、ESP等。被动安全是指当事故已经发生后被动地采取措施来减小对人体的伤害和损失,例如安全带和保险杠。通过比较两者的作用,我们可以看到,主动安全对汽车安全行驶的作用相对较大。汽车主动安全又可称为汽车的事故预防性能,它主要包括汽车的操纵稳定性、可靠性和环境可视性等,其中汽车的操纵稳定性对主动安全性的影响最大,因此,它也是世界各国专家研究的重点[4]。汽车稳定性控制系统是汽车主动安全领域的一项关键技术,长期以来一直是汽车领域的研究热点[5]。
因此,电动汽车稳定性控制系统的研究对于应对能源问题,环境问题和安全问题具有深远的指导意义。
1.2电动汽车稳定性控制研究现状
1.2.1电动汽车横摆运动控制现状研究现状
目前在汽车稳定性控制研究方面,大多数学者是通过控制汽车的横摆运动来达到提升汽车稳定性的目的。在对汽车在行驶过程中的横摆运动进行控制时,需要考虑两方面内容,一方面是要能够建立合适的模型以及选取合适的控制变量,另一方面是选择合适的控制方法对汽车在行驶过程中的横摆运动进行控制来提升汽车的稳定性。
美国的克莱姆森大学致力于车辆稳定性控制模型的构建[6],首先利用Carsim建立基线车辆动力学模型,利用试验数据,对模型进行了各种稳态,瞬态和制动干预的标定及验证,然后,基于典型控制策略,在Matlab/Simulink中建立了简化的稳定性控制模型,随后将开发的车辆动力学模型和稳定性控制模型通过联合仿真进行耦合和标定,使其尽可能的接近真实试验。
日本东京大学在电动汽车操纵稳定性控制方面做出了巨大贡献,文献[7][8]介绍了一种以轮胎滑移率为控制变量的电动汽车的稳定性控制器,主要原理是通过每个车轮上的传感器检测轮毂电机的电流信号和轮速信号,并将这些信号通过计算机分析出轮胎的滑移率,从而利用稳定性控制系统使得驱动车轮产生相应的转矩来进行滑移率控制。
燕山大学[9]针对四轮独立转向-独立驱动(4WIS-4WID)车辆,基于滑模变控制理论,通过将不同的控制变量和不同的控制方法的组合设计了三种控制器,分别为AFS ARS控制器,质心侧偏角DYC控制器和横摆角速度DYC控制器,并且为了协调横摆角速度和质心侧偏角做了协调控制器。以二自由度车辆为参考模型,将横摆角速度和质心侧偏角信号给AFS ARS控制器,实现AFS ARS DYC的集成控制,可以显著提升汽车的主动安全性。
1.2.2 电动汽车的控制策略及转矩优化分配研究现状
随着计算机技术以及控制理论的发展,学者们对于控制策略的设计及使用越来越高级化、多样化。对于转矩优化分配的研究,相关学者也做了很多的研究,通过设计不同的目标函数,也会得到不同的分配结果。
在文献[10]中,使用现行二次最优控制器(LQR)来控制汽车在行驶过程中的横摆运动,其基本原理如公式(1.1-1.5)所示,通过调整权矩阵和控制输出汽车在行驶过程中保持稳定性所需的附加横摆力矩。
(1.1)
以上是毕业论文大纲或资料介绍,该课题完整毕业论文、开题报告、任务书、程序设计、图纸设计等资料请添加微信获取,微信号:bysjorg。
相关图片展示: