基于其他车辆的预测行为修改自动车辆的行为外文翻译资料
2022-07-27 10:52:47
英语原文共 18 页,剩余内容已隐藏,支付完成后下载完整资料
毕业设计外文翻译
美国专利
专利号:US 8,457,827 B1
基于其他车辆的预测行为修改自动车辆的行为
发明人:David I.Ferguson,San Francisco,CA(US); Dmitri A. Dolgov,山景城,
CA(美国)
受让人:Google Inc.,Mountain View,CA(US)
注意:根据任何免责声明,本条款专利延期或根据35 U.S.C. 154(b)0天。
申请号:13 / 420,820
提交日期:2012年3月15日
概要:被配置为以自主模式操作的手势可以确定车辆的当前状态和车辆的环境的当前状态。 车辆的环境包括至少一个其他车辆。 至少一个其他车辆的预测行为可以基于车辆的当前状态和车辆的环境的当前状态来确定。 还可以基于预测行为,车辆的当前状态和车辆的环境的当前状态来确定置信水平。 在一些实施例中,置信度水平可以与至少一个其他的vemcle执行预测的行为的可能性相关。 可以基于预测行为,置信水平和车辆的当前状态及其环境来控制处于自动模式的车辆。
下面是20个要求,7张图纸:
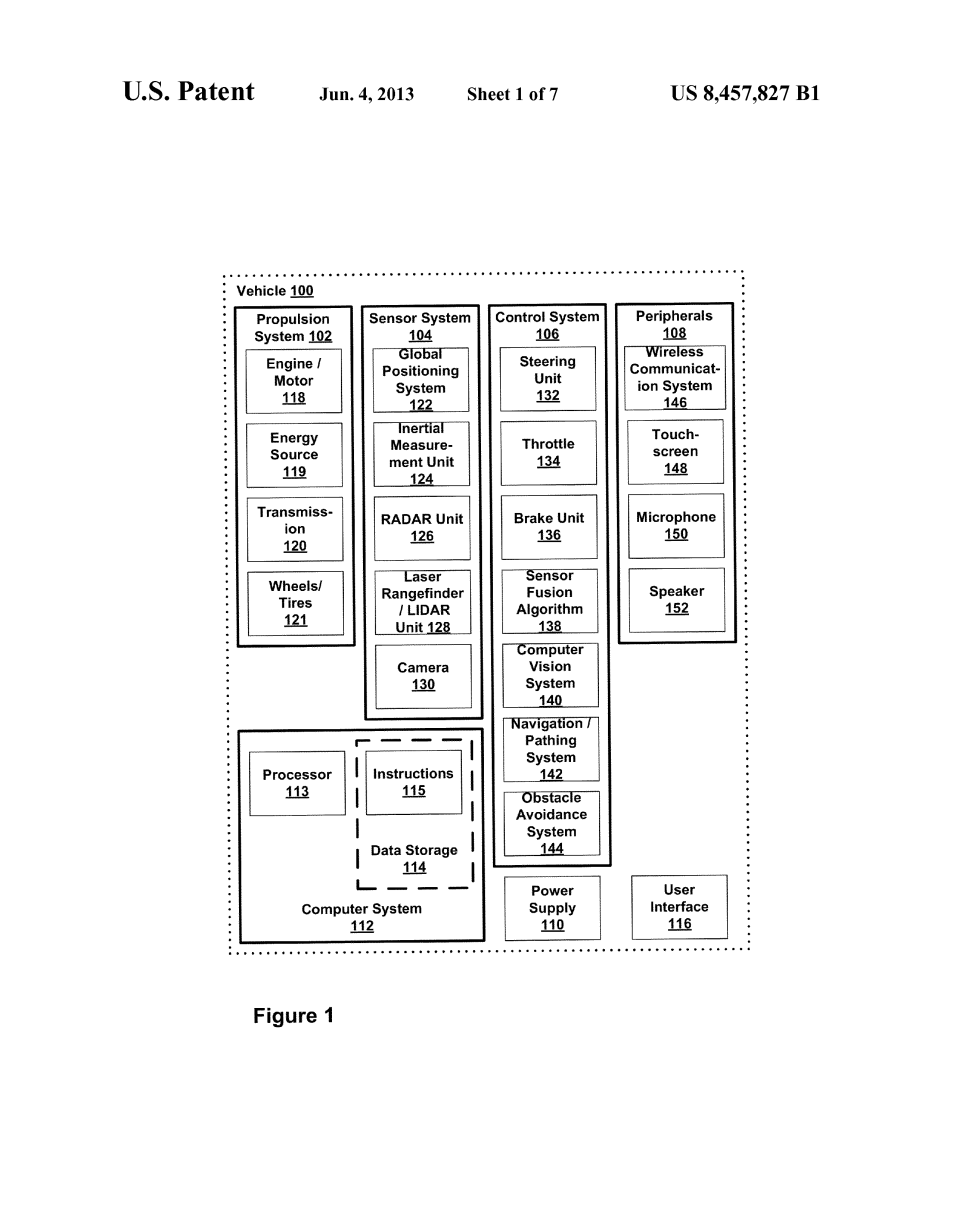
图1:
102:推进系统 104:传感器系统 106:控制系统 108:外设
118:发动机 122:传感器系统 132:操纵单元 146:无线通讯系统
119:能源资源 124:惯性测量单位 134:风门 148:触控屏
120:传输 126:雷达单位 136:制动单元 150:麦克风
121:车轮/轮胎 128:激光 138:传感器融合算法 152:扬声器
130:摄像机 140:电脑视力系统
113:处理器 115:说明 142:导航系统
114:数据存储 144:障碍避免系统
112:电脑系统 110:功率供应 116:用户接口
图2:
图3A:
图3B:
图3C:
图4:
图5:
500:电脑处理系统 502:信号承载介质 504:编程说明
506:计算机可读介质 508:计算机可记录介质 510:通信媒介
基于其他车辆的预测行为修改自动车辆的行为
背景:除非本文另有说明,本节中所述的材料不是本申请中的索赔的在先技术,并且不包括在本节中的现有技术。
一些车辆被配置为在自主模式下操作,此时车辆在驾驶员很少或没有输入的情况下导航通过环境。 这种车辆通常包括被配置为感测关于环境的信息的一个或多个传感器。 车辆可以使用感测的信息来导航通过环境。 例如,如果传感器感测到车辆正在接近障碍物,则车辆可以在障碍物周围导航。
概要:
在第一方面,提供了一种方法。该方法包括使用计算机系统确定车辆的当前状态。车辆被配置为以自动升降模式操作。该方法还包括使用计算机系统确定车辆的环境的当前状态。车辆的环境包括至少一个其他车辆。该方法还包括使用计算机系统至少基于车辆的当前状态和车辆的环境的当前状态来确定至少一个其他车辆的预测行为。该方法还包括使用计算机系统确定置信水平。置信水平包括至少一个其他车辆执行预测行为的可能性。置信水平至少基于预测行为,车辆的当前状态和车辆的环境的当前状态。该方法还包括使用计算机系统基于预测行为,置信水平,车辆的当前状态和车辆的环境的当前状态来控制处于自主模式的车辆。
在第二方面,提供了一种车辆。车辆包括至少一个传感器。所述至少一个传感器被配置为获取车辆状态信息和环境状态信息。车辆状态信息包括关于车辆的当前状态的信息。环境状态信息包括关于车辆的环境的当前状态的信息,并且车辆的环境包括至少一个其他车辆。车辆还包括计算机系统。计算机系统被配置为基于车辆状态信息确定车辆的当前状态。计算机系统还被配置为基于环境状态信息确定车辆的环境的当前状态。计算机系统还被配置为至少基于车辆的当前状态和车辆的环境的当前状态来确定至少一个其他车辆的预测行为。该计算机系统另外被配置为确定置信水平。所述确定级别包括所述至少一个其他车辆执行所述预测行为的可能性。置信水平至少基于预测行为,车辆的当前状态和车辆的环境的当前状态。计算机系统还被配置为基于预测行为,置信水平,车辆的当前状态和车辆的环境的当前状态来控制处于自主模式的车辆。
在第三方面,提供了一种具有存储的指令的非暂时性计算机可读介质。该指令可由计算机系统执行以使计算机系统执行功能。所述功能包括确定车辆的当前状态。车辆被配置成在自主模式下操作。所述功能还包括确定车辆的环境的当前状态。车辆的环境包括至少一个其他车辆。功能还包括至少基于车辆的当前状态和车辆的环境的当前状态来确定至少其他车辆的预测行为。所述功能还包括确定置信水平。置信水平包括至少一个其他车辆执行预测行为,车辆的当前状态和车辆环境的当前状态的可能性。
前述发明内容仅是说明性的,并且不旨在以任何方式进行限制。除了上述说明性方面,实施例和特征之外,另外的方面,实施例和特征将通过参考附图和以下详细描述而变得显而易见。
附图说明
图1是示出根据示例实施例的车辆的功能框图。
图2示出了根据示例性实施例的车辆。
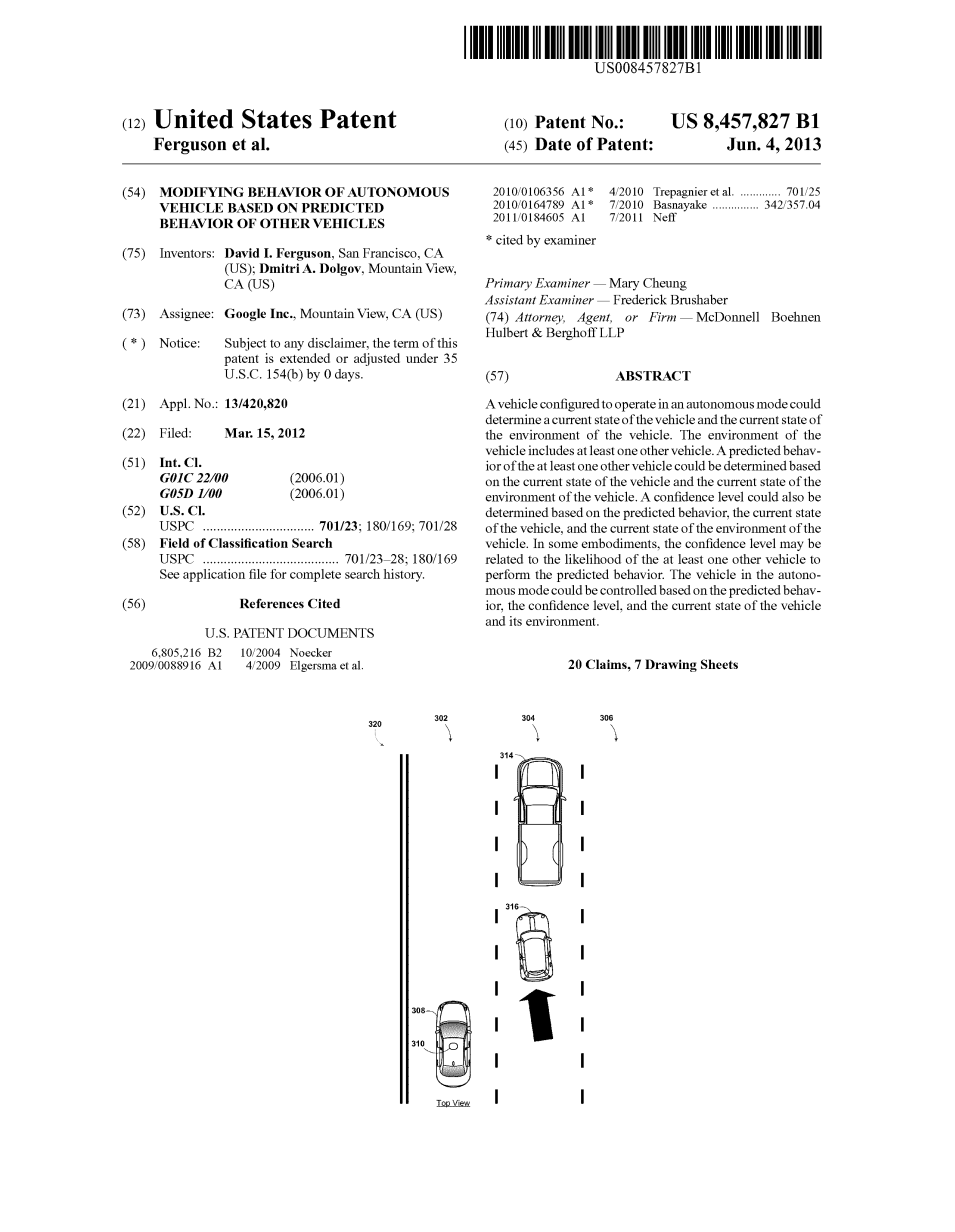
图3A是根据示例实施例的自主车辆操作场景的俯视图。
图3B是根据示例实施例的自主车辆操作场景的俯视图。
图3C是根据示例实施例的自主车辆操作场景的俯视图。
图4示出了根据示例实施例的方法。
图5是根据示例实施例的计算机程序产品的示意图。
详细说明:
本文描述了示例性方法和系统。在此描述的任何示例性实施例或特征不必要地被解释为比其他实施例或特征更优选或有利。这里描述的示例实施例不意味着限制。将容易理解,所公开的系统和方法的某些方面可以以各种各样的不同配置来布置和组合,本文中预期所有这些配置。
此外,图中所示的特定布置不应被视为限制性的。应当理解,其他实施例可以包括更多或更少的给定图中所示的每个元件。此外,一些示例性元件可以组合或省略。此外,示例实施例可以包括在附图中未示出的元件。
1.概述
本文公开的示例性实施例涉及确定车辆的当前状态,确定车辆的环境的当前状态,确定车辆的环境中的至少一个其他车辆的预测行为,确定与车辆的环境相关的置信水平到所述至少一个其他车辆的类似物以执行所述预定行为,以及基于所确定的信息控制所述车辆在自主模式下操作。
在本公开的上下文中,车辆可以以各种操作模式操作。根据实施例,这些操作模式可以包括手动,半自主和自主模式。在自动驾驶模式中,车辆可以在很少或没有用户交互的情况下被驾驶。在手动和半自主模式中,车辆可以分别由用户完全地和部分地驱动。
本文公开的一些方法可以由被配置为在具有或不具有外部交互(例如,诸如来自车辆的用户)的自主模式下操作的车辆部分地或完全地执行。在一个这样的示例中,车辆可以确定车辆的当前状态。例如,车辆可以获取关于车辆的各种推进,传感器和控制系统(例如,每分钟转数,车辆速度,当前行驶车道,燃料水平,制动液位等)的数据。车辆可以确定车辆的环境的当前状态。在本公开的上下文中,车辆的环境包括至少一个其他车辆。车辆的环境的当前状态的确定可以基于关于外部驾驶条件(例如,道路上的冰),其他车辆速度和其他车辆位置的信息等来进行。车辆可以至少基于车辆的当前状态和车辆的环境的当前状态来确定至少一个其他车辆的预测行为。该方法还可以包括确定可以表示至少一个其他车辆执行预测行为的可能性的置信水平。置信水平的确定可以基于预测的行为,车辆的当前状态和车辆的环境的当前状态。基于所确定的信息,车辆可以在自主模式下被控制。
本文公开的其他方法可以由服务器部分地或完全地执行。在示例实施例中,服务器可以从以自动模式操作的车辆接收传感器数据,诸如使用相机捕获的多个图像。传感器数据可以被服务器用来确定车辆的局部环境中的车辆的一个或多个预测行为。服务器可以附加地或替代地确定可以与各个车辆将执行给定的预测行为的一个或多个可能性相关的一个或多个置信水平。此外,服务器可以通过提供例如调整控制系统(节气门,制动单元,转向单元)的各个方面的指令来以自动升降模式远程地控制车辆。在自主模式下操作的车辆和服务器之间的其他交互在本公开的上下文中是可能的。
在本公开中还描述了车辆。车辆可以包括诸如至少一个传感器和计算机系统的元件。至少一个传感器可以被配置为获取车辆状态信息(关于车辆本身的信息)和环境状态信息(关于车辆的环境的信息)。计算机系统可以被配置为完全或部分地基于所获取的信息来执行各种功能。这些功能可以包括确定车辆的当前状态以及确定车辆的环境的当前状态。所述功能还可以包括确定车辆环境中至少一个其他车辆的预测行为以及可以表示所述至少一个其他车辆执行预测行为的可能性的对应置信水平。车辆的计算机系统还可以被配置为基于预测行为,置信水平和车辆的当前状态及其环境来以自主模式控制车辆。
本文还公开了具有存储的指令的非暂时性计算机可读介质。 指令可以由计算设备执行以使计算设备执行与前述方法中描述的功能类似的功能。
存在许多不同的具体方法和系统,其可以用于确定车辆的当前状态,确定车辆的环境的当前状态,确定环境中至少一个其他车辆的预测行为,确定置信水平 响应于所述至少一个其他车辆执行所述预测行为的可能性,以及基于所确定的信息在自主模式中控制所述车辆。 这些具体方法和系统中的每一个都在本文中考虑,并且下面描述几个示例性实施例。
- 示例系统
现在将更详细地描述在本公开的范围内的示例系统。示例系统可以以自动机的形式实现或者可以采用自动机的形式。然而,示例系统还可以以其他车辆,例如汽车,卡车,摩托车,公共汽车,船,飞机,直升机,割草机,推土机,船,雪地机,飞机,娱乐车,游乐园车辆,农场设备,制造设备,有轨电车,高尔夫车,火车和手推车。其他车辆也是可能的。
图1是示出根据示例实施例的车辆100的功能框图。车辆100可以被配置为完全或部分地以自动登录模式操作。例如,车辆100可以在自主模式下控制自身,并且可操作以确定车辆的当前状态及其环境,确定环境中至少一个其他车辆的预测行为,确定可以对应于至少一个其他车辆执行预测行为的可能性的置信度水平,并且基于所确定的信息来控制车辆100。当处于自主模式时,车辆100可以被配置为在没有人类交互的情况下操作。
车辆100可以包括各种子系统,例如推进系统102,传感器系统104,控制系统106,一个或多个外围设备108,以及电源110,计算机系统112和用户接口116。车辆100可以包括更多或更少的子系统,并且每个子系统可以包括多个元件。此外,车辆100的每个子系统和元件可以互连。因此,车辆100的一个或多个所描述的功能可以被划分成附加的功能或物理部件,或者组合成更少的功能或物理部件。在一些另外的示例中,附加的功能和/或物理组件可以被添加到图1所示的示例1。
推进系统102可包括可为车辆100提供动力运动的部件。根据实施例,推进系统102可包括发动机/电动机118,内燃机119,变速器120 ,以及轮/轮胎121.发动机/电动机118可以是内燃机,电动机,蒸汽发动机,斯特林发动机或其它类型的发动机和/或电动机的任何组合。在一些实施例中,发动机/马达118可以被配置为将能量源119转换成机械能。在一些实施例中,推进系统102可以包括多种类型的发动机和/或马达。例如,气 - 电混合动力汽车可以包括汽油发动机和电动机。其他示例是可能的。
能量源119可以表示可以全部或部分地为发动机/电动机118供电的能量源。也就是说,发动机/电动机118可以被配置为将能量源119转换成机械能。能量源119的示例包括汽油,柴油,其他基于石油的燃料,丙烷,其他基于压缩气体的燃料,乙醇,太阳能电池板,电池和电力的其它来源。能量源119可附加地或改变地包括燃料箱,电池,电容器和/或飞轮的任何组合。能量源119还可以为车辆100的其他系统提供能量。
变速器120可包括能够将机械动力从发动机/马达118传递到车轮/轮胎121的元件。为此,变速器120可包括齿轮箱,离合器,差速器和驱动轴。变速器120可以包括其他元件。驱动轴可以包括可以联接到一个或多个轮/轮胎121的一个或多个轴。
车辆100的车轮/轮胎121可以以各种形式构造,包括独轮车,自行车/摩托车,三轮车或汽车/卡车四轮格式。其他车轮/轮胎几何形状是可能的,例如包括六个或更多个车轮的那些。车辆100的车轮/轮胎121的任何组合可以可操作以相对于其他车轮/轮胎121差别地旋转。
车轮/轮胎121可以表示固定地附接到变速器的至少一个车轮以及至少一个轮胎,其耦合到所述轮的轮缘,所述轮缘可与所述驱动表面接触。轮子/轮胎121可以包括金属和橡胶的任何组合,或者材料的另一组合。
传感器系
全文共7350字,剩余内容已隐藏,支付完成后下载完整资料
资料编号:[144387],资料为PDF文档或Word文档,PDF文档可免费转换为Word



