多AUV协同定位设计及仿真毕业论文
2020-02-19 15:02:06
摘 要
近年来随着海洋经济的日益繁荣,水下航行器逐渐走向智能化、自动化、模块化及多功能化的特点,受到世界各国越来越广泛的关注。自主水下航行器(AUV)成为当今海洋工程领域的研究热点,并且已经在欧美部分发达国家得到积极应用。
多自主水下航行器的协同定位问题是伴随多水下航行器协作应用而发展而来的新型水下定位技术。本研究以提高多自主水下航行器协同定位效果为目的,通过利用UKF算法基于路径跟踪原理提高协同定位性能。
论文对几种常见协同定位算法进行了简要对比分析,在此基础上,构建了一简单运动场景,以一鱼雷式小型AUV为参考原型,完成了动力学建模,并利用MATLAB软件进行编程仿真,通过设计方案的仿真结果与参考路径的对比,验证了所使用的设计方案可行有效。
关键词:AUV;协同定位;UKF算法;MATLAB;路径跟踪
Abstract
In recent years, with the increasing prosperity of the marine economy, underwater vehicles have gradually become intelligent, automated, modular and multi-functional, which has attracted more and more attention from all over the world. Autonomous underwater vehicle (AUV) has become a research hotspot in the field of ocean engineering, and has been actively applied in some developed countries in Europe and America.
Cooperative positioning of multiple autonomous underwater vehicles (MAUVs) is a new underwater positioning technology developed with the cooperative application of MAUVs. In order to improve the cooperative positioning effect of multi-autonomous underwater vehicles, the UKF algorithm is used to improve the cooperative positioning performance based on the principle of path tracking.
In this paper, several common cooperative localization algorithms are briefly compared and analyzed. On this basis, a simple motion scene is constructed. A small torpedo-type AUV is used as a reference prototype to complete the dynamic modeling. The simulation results of the design scheme are compared with the reference path, which verifies the feasibility and effectiveness of the design scheme.
Key Words:AUV; Cooperative location; UKF Algorithm; MATLAB; Path Tracking
目 录
第1章 绪论 1
1.1 研究背景 1
1.2 研究目的和意义 1
1.3 国内外研究现状 2
1.3.1 国外研究现状 2
1.3.2 国内研究现状 3
1.3.3 多自主水下航行器协同研究发展趋势 3
1.4 本文研究内容 4
1.5 本章小结 4
第2章 协同定位算法 6
2.1 常见协同定位算法 6
2.2 基于卡尔曼滤波协同定位算法 6
2.2.1 卡尔曼滤波算法(KF算法) 6
2.2.2 扩展卡尔曼滤波算法(EKF算法) 8
2.2.3 无迹卡尔曼滤波算法(UKF算法) 9
2.3 本章小结 11
第3章 设计与仿真 12
3.1 设计方案 12
3.2 数学建模 12
3.2.1 一从AUV建模 13
3.2.2 二从AUV建模 14
3.3 本章小结 16
第4章 仿真结果及分析 17
4.1 仿真结果 17
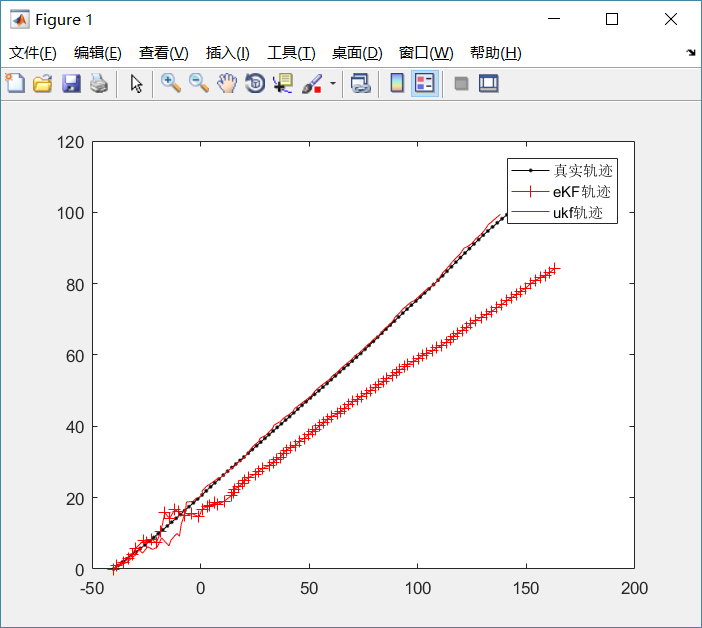
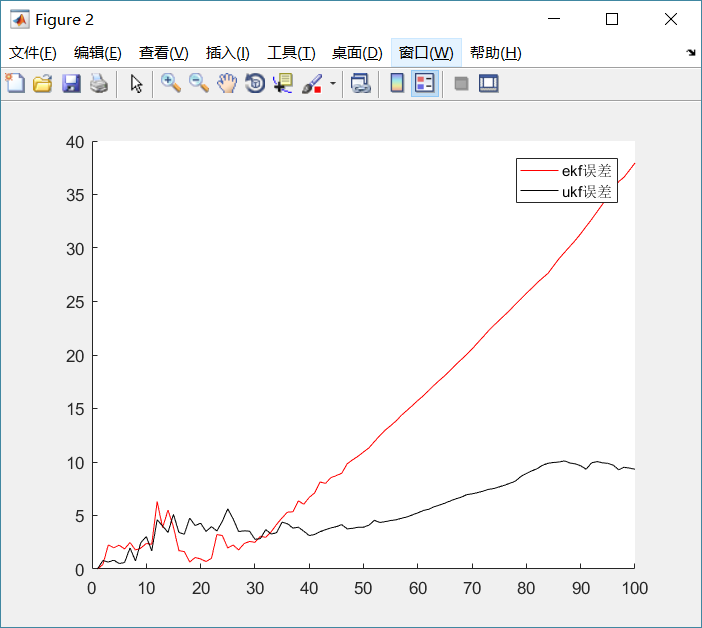
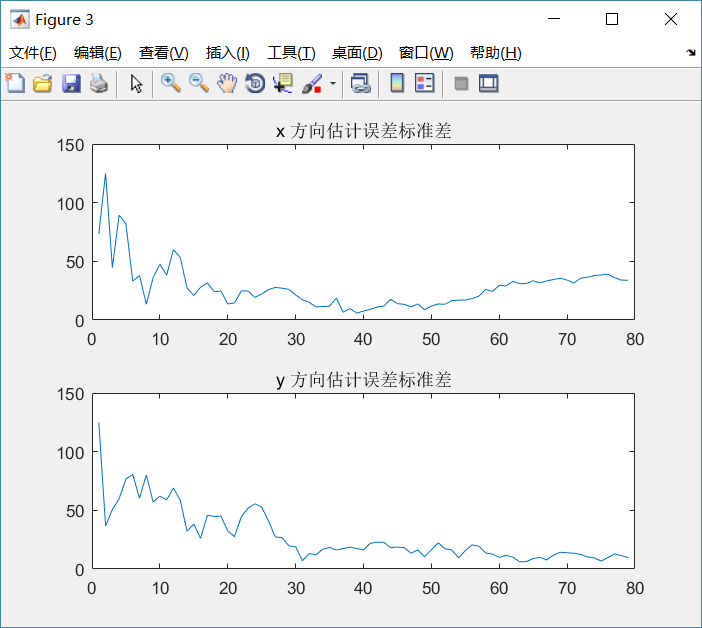
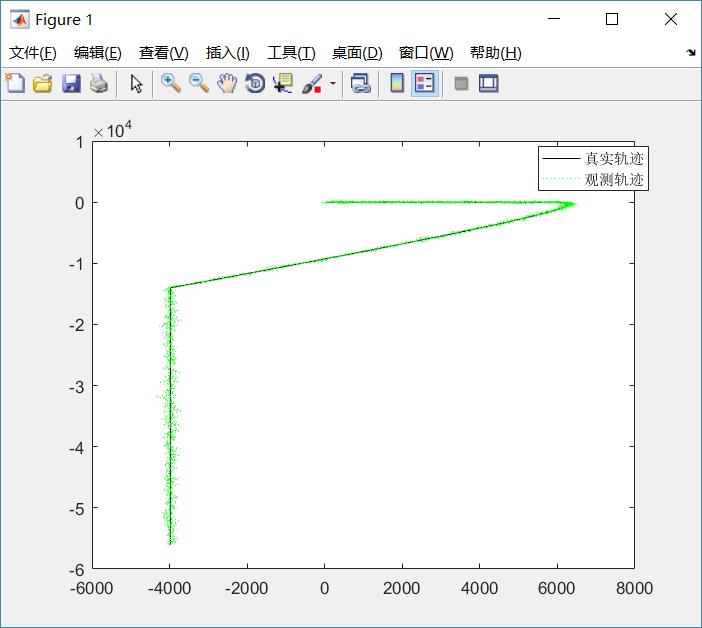
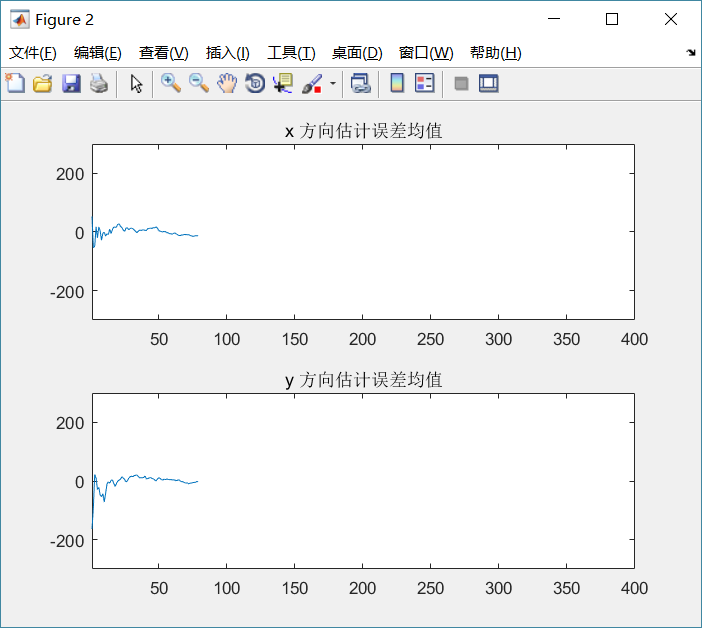
4.1.1 一从AUV协同定位仿真结果 17
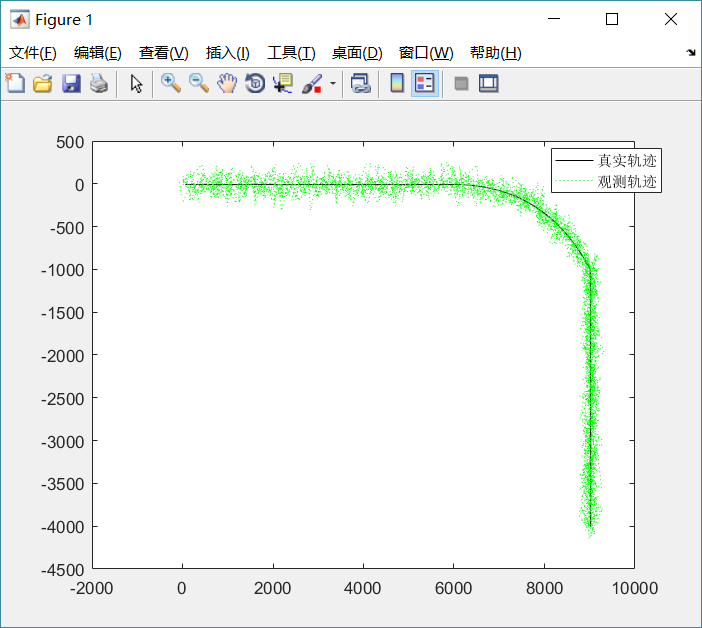
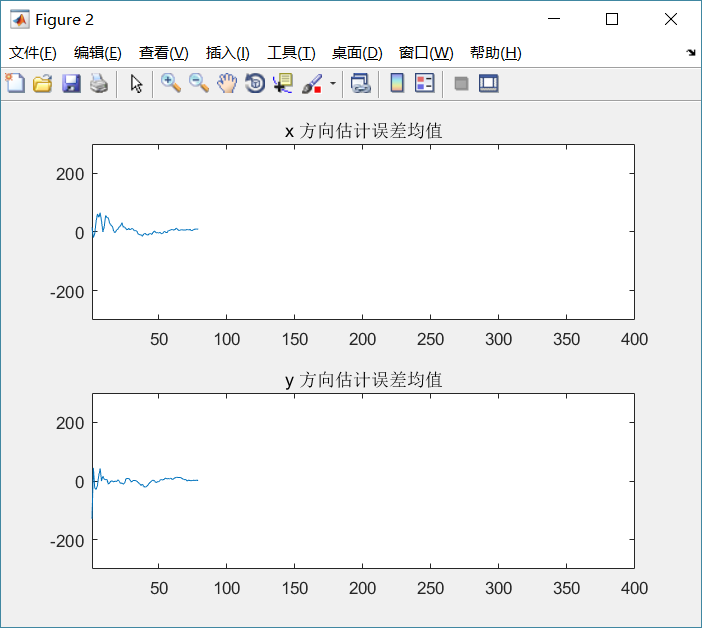
4.1.2 二从AUV协同定位仿真结果 19
4.2 仿真结果分析及优化方向讨论 24
4.3 经济性和环保性分析 25
4.3.1 经济性分析 25
4.3.2 环保性分析 25
4.4 本章小结 25
第5章 总结与展望 27
5.1 总结 27
5.2 展望 27
参考文献 ………………………………………………………………………………………..29
致 谢…………………………………………………………………………………………….31
绪论
研究背景
随着人类社会的不断发展,能源的需求量也在日益提升,如何实现能源的可持续供应成为人类社会发展的重要课题,海洋可持续能源的探索和开发也因此成为研究的焦点问题。但是海洋环境本身存在着其独特之处,例如可视度低、突发情况较多等,在这样的背景下对海洋领域的探索开发工作变得异常困难起来。
21世纪后,各个国家开始高度关注海洋资源的争夺,由此在进行军事战略规划的同时加大了对这一领域的研究开发投入。中国是一个海洋领土面积达到300多万平方公里、海岸线长度达3万多公里的海洋大国,在世界排名前列。进一步对海洋坏境进行了解,实现合理的开发和保护成为实现人类社会可持续发展的共同议题。
研究目的和意义
这些年以来,因为世界人口的不断增多,人类活动范围不断扩展,为满足日益增长的生存生活需求,人们对海洋领域的探索需求也应运而生。基于此,自主水下航行器的设计需求中逐渐增加了自动化、模块化等,同时也需要满足复杂多样的功能需求。世界各个国家为了满足国家发展,也更加积极的加入对这一领域的研究投入。目前,自主水下航行器已经在欧美一些发达国家实现了广泛应用。
自主水下航行器(Autonomous underwater vehicle,AUV)是无人水下航行器(Unmanned underwater vehicle, UUV)的一种,它是一种对于高新科技进行综合运用的产物,其中包括了目前尖端的计算控制系统、模拟延伸拓展人类智能技术、常用计算机数据指令集合、传感器、新型材料等。主水下航行器在水下作战和水下作业方面更加灵活机动,因为相比起传统的水下航行器,它摆脱了缆线的束缚。因此在如军事领域的侦察与监视、反潜与巡逻,科研领域的海洋测绘、海洋资源勘探,包括民用领域的潜水支援等都发挥着重要的作用,是当今海洋工程以及机械科学等各种学科领域共同的研究热点。
在自主水下航行器的定位研究基础上,为了满足更为复杂多样的探索需求,多自主水下航行器的协同作业方案被提出,也因此成为一种新兴海洋探索技术。这一技术的优势在于,它能够满足对于海洋环境尤其是目标范围较大的情况下的调查作业、对失事船只的搜寻工作,同时,还能够满足海洋领域的军用需求,例如可以进行情报搜集作业、检测水雷从而实现航路优化以及中继通信这些单个水下航行器无法实现的多需求任务,而且它在实现效率更高、可靠性更强、质量更稳定的同时能够降低系统成本。在这样的背景下,多自主水下航行器系统的协同定位问题成为研究的热点问题。
为了更好的完成自主水下航行器的预定任务,导航定位的精度高低就显得尤为重要。可想而知,多自主水下航行器系统的定位问题更为复杂,因为其不仅包含了单个自主水下航行器的精准定位需求,同时还需要考量航行器间如何实现协同作业的问题,这又包括了系统的编队如何实现保持控制以及对作业效率的兼顾问题,因此,协同导航的研究是世界范围内的共同热点,它的研究开始于20世纪末,针对的平台包括陆上机器人、卫星、水下无人航行器等。
但是,由于水介质与其他介质不同,通常使用的GPS卫星导航定位虽然在其他场合能够满足高精度的需求,但是它并不适用于自主水下航行器系统,而传统的声学导航方法虽然能够实现水下定位,但仍然存在着设备庞大、操作复杂或成本高等限制,无法很好的满足日益更新的自主水下航行器导航需求。目前在水下导航领域广泛应用的导航系统还有惯性导航系统,虽然其能够实现完全自主化且对外部信息的的依赖极低的特点,但是固有的导航误差会随着时间不断积累,这一问题仍然会对水下长时间巡航的高精度导航需求大打折扣,且自主水下航行器的应用场合不仅限于军用和科研用这些领域,商业化应用同样是自主水下航行器未来发展的方向之一,常规商业化应用无法承担起基于惯性导航系统的自主水下航行器昂贵的造价,不利于自主水下航行器的推广。
近些年来,伴随着对水声通信技术研究领域的重视,相关科研人员的不懈努力,多水下航行器协同定位技术也得到了更多的资源投入。为了更好地满足自主水下航行器导航性能的高精度需求,通过将水声通信技术与信息融合技术的结合,不同的自主水下航行器可以实现利用水声测距进行相互观测的信息共享,并且能够在实现导航定位误差矫正的同时降低成本。但是无法忽视的是,水介质不同于其他介质,声学通信仍然会受到限制。水下通信环境的信道带宽更窄、数据传输率低、系统可观测性若、协同更新频率慢且噪声复杂,多自主水下航行器协同定位系统的性能提升因此受到阻碍。
因此,各国多水下自主航行器协同定位的研究中通过更新算法、提升通信设备性能等多方位多角度进行尝试,希望能够解决上述困境,提升系统的能效。
国内外研究现状
国外研究现状
传统军事强国如美国、英国、法国等在协同技术领域的研究与应用成果远远领先于其他国家的研究发展进度。近十年来,美国Minnesote大学Roumeliotis的研究小组基于目前机器人成组协同定位的理论研究上开展了关于可观测性、误差分析与补偿、估计一致性和编队构型这些方面的优化研究。麻省理工大学由Bahr领导的团队对潜航器的协同定位方法进行了深入研究,在是否利用水面艇的两种条件下展开研究讨论。意大利Garello领导的研究团队讨论了终端平均捕获时间与协同定位效果的相关性强度,并在特殊场景下进行了定位性能的对比实验。欧洲联盟开展了一个名为MAUVs GREX的多水下潜航器的项目中,研究人员对无水声定位仅利用航迹推算和潜航器距离量测的协同定位效果讨论。威特研究所联合伍兹霍尔海洋研究所开展的CATALYST项目采用伍兹霍尔海洋研究所开发的两个REMUS 6000系列水下机器人实现水下双自主水下航行器系统在工作深度为25米-6000米的协同作业,在这一项目中,成功实现了根据搭载传感器的不同对水文调查、环境监测、海洋地形测绘、目标物的寻找和打捞、渔业作业和科学取样等不同深测任务。佐治亚理工学院的研究人员也对于针对科研用的海底环境探测和污染海域检测的多自主水下航行器系统的协同作业进行了研究,均获得一定的突破的进展。
国内研究现状
我国关于自主水下航行器的相关研究受条件限制落后于国外,我国在上世纪八十年代研制出的HR-01无人有缆遥控水下航行器样机标志着我国这一领域研究的正式开始。我国的水下航行器研究工作在二十世纪九十年代后进展较大,取得了相应科研项目的较大突破。而近年来,随着多机器人系统研究热潮的兴起以及海洋资源探索、保护相关研究的重视,多自主水下航行器包括航行器优化、系统设计以及协同作业成为我国海洋工程领域、机械工程领域等研究的重点之一。
上海交通大学的吴小平首先采用四元素法对自主水下航行器运动进行建模,实现了自主水下航行器模型任意纵倾角的全自由度仿真,并使用启发式算法结合旅行商问题实现多自主水下航行器协同路径规划问题的最短路径求解,此外,还进行了静态碰撞和动态碰撞的风险检验。同时,他还首次提出引入模糊逻辑用以建立模糊人工时长的基于模糊势场的虚拟领航者队形控制算法来解决多自主水下航行器的队形控制问题。这一方案不仅解决了传统常用“领航者-跟随者”方法的不足,还弥补了之前常用的势函数定义人工势场引起的路径轨迹不光滑问题。在关于多自主水下航行器的区域覆盖问题讨论上,他通过采取一定的控制算法使多自主水下航行器群体在待考察海域形成指定空间的质心Voronoi分布,并且通过使用连续惩罚函数处理非均匀密度分布函数的惩罚系数选取问题,实现自主水下航行器获得期望的覆盖分布。
哈尔滨工程大学的朱亦峰针对多自主水下航行器的定位问题提出了基于伪点迹的多自主水下航行器相互定位的方法,通过将自主水下航行器分为测算计量、运算和日常使用这些类型,采用令牌环网通信结构和指责轮换机制实现了每个自主水下航行器在任务过程中对于能源补充的需求。这项研究对测量自主水下航行器处于非动态情况下,分析其余水下航行器处于定深航行和变深航行两种状态下的定位过程,同时还在干扰因素中加入了洋流这类不定因素,基于此进行定位过程分析,为多自主水下航行器协同定位问题的研究提供了更多参考思路。
可以预见,随着我国海洋开发与应用领域的不断发展,多自主水下航行器相关的协同定位问题优化与将其利用到实际场景中的研究工作将会得到更快更好的发展。
多自主水下航行器协同研究发展趋势
针对目前存在的关键问题和发展趋势,多自主水下航行器协同导航研究的重点和发展方向主要有以下几个方面:
- 当前大部分研究工作(包括本文描述的研究方法)都是针对多自主水下航行器协同导航建模与补偿算法,对协同导航网络误差传播特性的理论研究较少,有待进一步讨论。
- 由于多自主水下航行器的作业环境导致它们仅能够使用惯性导航设备、水声通信与测距装置作为主要传感器,再根据这些传感器的测量值建立基于相对位置测量的滤波模型。由于通信环境的特殊性,不仅会产生时间延迟、时钟飘逸这类问题,并且数据如何保存完整性、保证正确率也同样需要考虑。基于此背景,为了实现在实际生产环境中的应用,只有使用精度更高、鲁棒性更强的协同导航滤波算法才能够解决上述问题。同时,由于协同导航的性能指标复杂多样,例如通信、负载均衡性和计算并行性等都是指标之一,如何建立起完善协同导航性能指标评价体系也十分重要。
- 航路规划构型优劣直接影响着协同定位性能。多自主水下航行器未来的协同定位研究方向还应当从时间和空间的相关性入手,考虑多种约束条件进行协同特性的数学模型解析,进而能够达到整体协同的目的。既要考虑航行器自身因素,也要对彼此交互机制的影响进行考量。
- 多自主水下航行器水下工作相关研究的最终目的是为了服务于实际生活中的海洋资源利用、探索、保护,因此在特殊工况,如恶劣海况或航行器剧烈激动航行导致航向变化角速率频繁超值等情况下如何保证导航定位精度也将成为未来研究的重点之一。
- 同样,为了更好的实现上述目标,低成本、高精度也是多水下自主航行器协同网络发展的重要目标之一,对于传感器的选型、改良以及协同导航网络的模型改进同样也将成为研究的热点问题。
本文研究内容
本次研究以提高多自主水下航行器系统协同定位效果为目的,针对多自主水下航行器协同定位系统为达到设计目的需要挑战的问题,通过对协同定位滤波算法的比对和讨论,在此基础上进行算法改进,最终实现对系统的协同定位性能提升。其中,研究重点包括对无迹卡尔曼滤波算法等非线性滤波算法的学习与了解,并对目前用于实现协同定位的算法进行协同定位状态估计性能的分析比较,基于此讨论后续课题研究的方案设计及算法优化提供理论基础与设计方向。
本章小结
本章重点介绍了课题的研究背景,简要分析了多自主水下航行器导航定位问题的研究目的及意义,对目前国内外相关领域的研究进度进行了总结对比,同时对多自主水下航行器协同问题未来的发展趋势进行了简要分析,最后对本次课题的研究内容进行阐述,分析课题难点与相应技术方案,对课题的整体研究方案进行了规划。
协同定位算法
常见协同定位算法
由于多自主航行器协同定位问题成为目前国内海洋领域研究重点,为实现协同定位精度的提升从而实现多自主水下航行器系统的协同定位效果,国内外专家学者根据协同定位系统的不同特性使用不同核心算法进行尝试。目前的研究主要使用的协同定位算法大致可分为三类:基于优化理论的导航算法、基于图论的导航算法和基于贝叶斯估计的导航算法。
以优化理论为基础的协同定位算法适用于对系统模型无明确要求或非线性系统的多AUV系统协同定位处理,但存在着易造成过优估计、对时间同步要求高或对平台间计算同步要求高的限制。
基于图论的协同定位算法适用于高斯线性二次型模型及贝叶斯网络体系,它属于直接算法,较为复杂但过程直观,对平台间的计算同步要求相对较低,具有动态性和复杂性,但部分算法对运动模型有着严格限制。
基于贝叶斯估计的协同定位算法包含卡尔曼滤波算法和粒子滤波算法等,均以状态空间模型作为其算法的基本概念、范畴判断推理集合。卡尔曼滤波算法对线性系统状态方程进行利用,将对体系的输入和输出各个观察测量数据进行汇总集合,完成体系的环境最优估计,得到的结果与真实值极为接近,也被称为最优估计算法之一,本次课题研究采用的协同定位算法即是基于卡尔曼滤波算法延展出的无迹算法,将在下文进行详细介绍。而粒子滤波算法自二十世纪九十年代提出以来受到强烈关注,通过简化平台间由于相对观测带来的系统相关性,对传感器信息和相对观测信息进行融合后,利用蒙特卡洛滤波对自身导航状态进行估计从而实现对相关性的复杂化解构,但存在着结果成为过优估计和对初始位置的精确度要求较高的问题。目前也有学者在关于利用卡尔曼滤波对粒子滤波进行初始化实现精确度提升方面展开研究。
基于卡尔曼滤波协同定位算法
卡尔曼滤波算法(KF算法)
卡尔曼滤波由卡尔曼(R.E.Kalman)在1960年提出,最初被应用于工程领域,最为典型的应用实例即是阿波罗登月飞船和C-5A飞机的导航系统设计。卡尔曼滤波由于其过程中的被估计量动态变化规律通过系统动力学方程描述,动态统计特性由过程噪声和状态方程确定,适用性较强,在已知系统动力学方程的情况下,无论是平稳过程或是非平稳过程均可以利用卡尔曼滤波进行估计。
卡尔曼滤波算法需要对状态空间法进行推导,从而实现递推和多维随机过程估计,既可以是连续型的也可是离散型的,离散型算法在计算机上能够较为容易的完成实现过程。
卡尔曼滤波算法通过对五个核心公式不断进行循环迭代,可以实现对观测数据的实时更新处理,下面对卡尔曼滤波的算法步骤进行简单介绍:
- 对于任意离散控制过程系统,用线性随机方程进行描述:
(2.1)
以上是毕业论文大纲或资料介绍,该课题完整毕业论文、开题报告、任务书、程序设计、图纸设计等资料请添加微信获取,微信号:bysjorg。
相关图片展示: