AUV水下路径跟踪器设计及仿真毕业论文
2020-02-19 15:02:03
摘 要
近年来,国内外积极开展海洋资源的开发,无人船成为支撑这一开发的重要高科技产品。AUV能在水下自由航行,是探索海洋最好的选择之一。其中精确快速的路径跟踪方法是AUV能正常高效率工作的必要条件,成为研究的重点。
本文针对一种简化的运动情景,运用UKF算法和EKF算法对AUV进行路径跟踪的设计,并完成相应的数学建模和运用MATLAB编程进行算法的仿真,达到对AUV进行路径跟踪的目的。
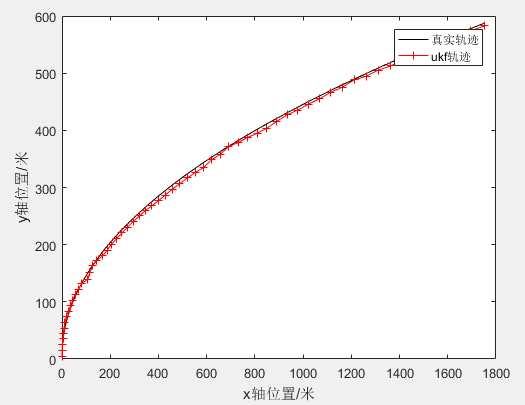
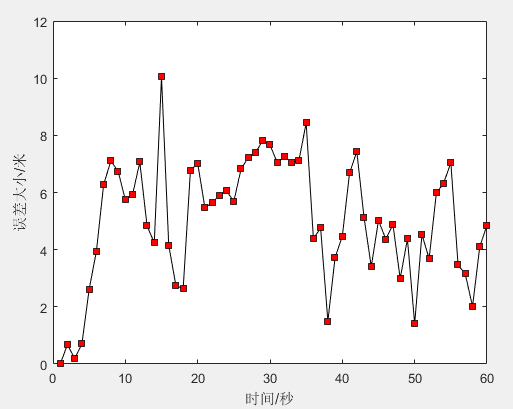
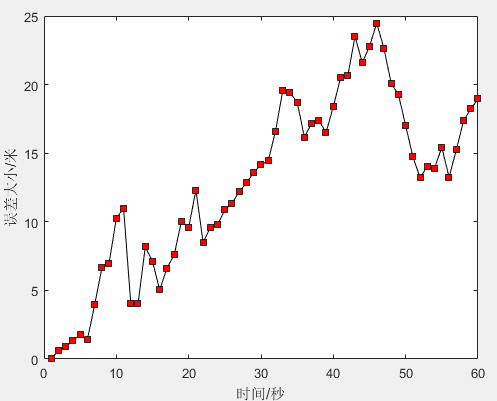
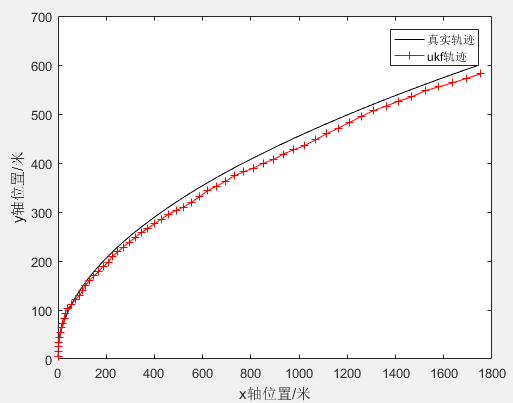
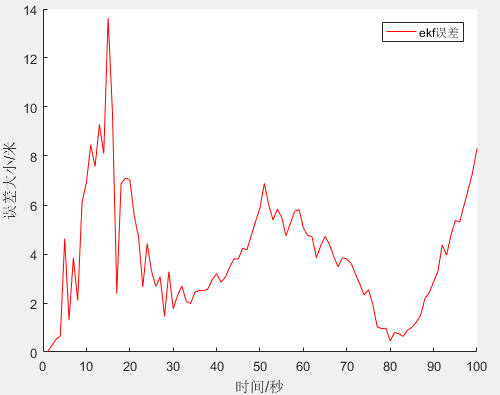
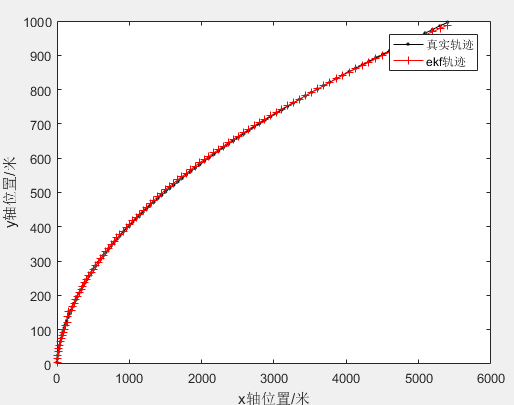
仿真数据表明:UKF算法所得结果与真实路径的误差很小,路径跟踪较为精确。以同样模型,进行EKF算法仿真,得到的结果也较为令人满意,但EKF算法由于要求雅可比矩阵,实现起来较为复杂,多次进行仿真时,有时会出现发散的迹象。因此,UKF算法比EKF算法更加优秀。
关键词:AUV;UKF算法;仿真;路径追踪
Abstract
In recent years, the development of marine resources has been actively carried out at home and abroad, and unmanned vessels have become an important high-tech product to support this development. AUV can navigate freely under water, which is one of the best choices to explore the ocean. Among them, accurate and fast path tracking method is the necessary condition for AUV to work normally and efficiently, and becomes the focus of research.
Aiming at a simplified motion scenario, this paper uses UKF algorithm and EKF algorithm to design AUV path tracking, and completes the corresponding mathematical modeling and simulation using MATLAB programming to achieve the goal of AUV path tracking.
The simulation results show that the error between the UKF algorithm and the real path is very small, and the path tracking is more accurate. With the same model, the simulation results of EKF algorithm are satisfactory, but the implementation of EKF algorithm is more complex because of the requirement of Jacobian matrix. When the simulation is carried out many times, sometimes there will be signs of divergence. Therefore, UKF algorithm is better than EKF algorithm.
Key words: AUV; UKF ; Simulation;Path tracking
目录
第1章 绪论 1
1.1 研究背景 1
1.2 研究目的与意义 1
1.3 国内外研究现状 2
1.3.1 国内研究现状 2
1.3.2 国外研究现状 3
1.3.3 自主式水下机器人发展趋势 3
1.4 研究内容 4
1.5 本章小结 5
第2章 路径跟踪算法 6
2.1 卡尔曼滤波(KF)算法 6
2.2 扩展卡尔曼滤波(EKF)算法 7
2.3 无迹卡尔曼滤波(UKF)算法 8
2.3.1 UKF算法简介 8
2.3.2 无迹变换原理与步骤 9
2.3.3 UKF算法实现步骤 10
2.4 本章小结 11
第3章 路径跟踪器设计与建模 12
3.1 路径跟踪器的设计 12
3.1.1 水下测距方法 12
3.1.2水下定位方法 12
3.1.3 路径跟踪 14
3.2 路径跟踪器的建模 14
3.2.1 系统状态方程 15
3.2.2 系统观测方程 15
3.3 本章小节 16
第4章 仿真结果与分析 17
4.1 UKF算法仿真结果分析 17
4.2 EKF算法仿真结果分析 19
4.3 UKF算法与EKF算法对比仿真分析 20
4.4 本章小节 21
第5章 经济性与环保性分析 22
5.1 经济性分析 22
5.2 环保性分析 22
第6章 总结与展望 23
6.1 总结 23
6.2 展望 23
参考文献 25
致谢 26
第1章 绪论
1.1 研究背景
人类的发展不是一帆风顺的,不同的时期总有不同的困难与矛盾,现代社会也一样,日益增长的人口总数与日益减少的自然资源之间的矛盾早已显现苗头,牵动无数人的心弦,悲观者甚至认为,地球会因此而走向毁灭。
经济的急速发展,带来了物质的繁荣,导致了人口的快速膨胀,据国家统计,假设1980年国家消耗自然资源数量指数为100,则在2000年末,该指数增长到1800左右,人口的剧增,使得陆地资源渐渐减少着。上天赐予陆地的宝藏或许会日益枯竭,但更为辽阔、更为神秘的海洋,作为生命发源之地,在几乎未被人类打扰与影响的情况下,也许,深藏着不输于陆地的惊喜。作为一个巨大的、未经人类完全了解的蓝色聚宝盆,海洋的开发已经是世界很多拥有海洋领土国家的长期工作之一,海洋既是资源的新的来源地,也是各国激烈竞争的热门领域,一个国家越是强大,其所拥有的技术越加先进,其对海洋的探索就越发的得心应手,其优势便越发明显。我国位于亚洲东部,位置优越,紧靠黄海、东海与南海,海岸线绵延不绝。据国内外有关资源部门估计,在我国海域,石油资源量在150亿吨到200亿吨之间,天然气资源为14.09万亿立方米左右。
海洋蕴藏着很大的开发潜力,但对其开发不是一件简单的事情。毕竟人类不能长时间待在水下,许多事情不能亲手进行,这便让一些原本简单的事情变得复杂且成本高昂。海洋中许多人类无法涉足之地,都需要凭借高新技术进行探索,自主式水下机器人的存在,便是人类努力变通的成果之一,其重要性不言而喻,世界海洋强国投入巨大的资金与人力来进行自主式水下机器人的研发,以期在海洋开发程度上领先一步,我国亦不例外。
1.2 研究目的与意义
自主水下机器人英文名为“Autonomous Underwater Vehicle”,集成了多种先进技术,能在无人控制的情况下,独立的完成一些任务。海洋的复杂环境,让人类无法向在陆地上一样自由探索,自主式水下机器人的存在[1],则替代了这一工作,无论是海洋中研究采样本的采集,还是地形地势的探查,亦或是矿产资源的勘探,它都能极好的完成任务。相比起军舰、航母等战斗工具,自主式水下机器人显得娇小无害,军事上对其尤为重视,用在情报与反潜作战上,往往能起到出其不意的作用。目前,对自主式水下机器人的成功应用,在各国都有,大多用于科研与军事。
尽管自主式水下机器人应用方便,但其研发到实用过程并不顺利,需要各种学科先进技术手段支撑。设想,在满是礁石或地势险峻的深海,在无人实时控制的情况下,自主式水下机器人如何安然通过,在海啸或其他原因的干扰下,若是偏离了原有的行进路线,自主式水下机器人如何自动调整,上述情况都是在实际应用中可能出现的,想要安然的应对上述状况,准确地路径跟踪必不可少,这便是本课题研究内容意义所在。
1.3 国内外研究现状
1.3.1 国内研究现状
自主水下机器人一直是水下机器人领域的研究热点,已经在海洋科学研究、海洋资源调查和海洋安全保证等方面得到了广泛的应用。我国科学技术较那些发达国家存在巨大差距,世界各国对于AUV研究进行到一定阶段时,我国的起步阶段才姗姗来迟,不仅规模较小,研究机构数量也不多,少数高等院校才有研究能力。在863计划之前[2],我国仅能研制浅海区域有缆遥控机器人。直到九十年代中期,我国才在该领域内取得重要研究成果。
1994年,沈阳自动化所联合国内相关研究所和几个重点高校,研发出了“探索者”号,这是我国第一台1000米级AUV。
在1995年,以沈阳自动化所为首的国内科研组织联合俄罗斯,研发了CR-01,并将其在太平洋海域内成功应用,探索深度可达6000米,基本上达到了当时的国际先进水平。CR-01型自主式水下机器人有路径跟踪功能,可自动行驶,不会偏离指定路线,定位误差较小。在6000米海中,它能正常的进行拍照、测量等功能。主要用于海底矿产资源探测、目标对象的搜索及海底地形的测量等方面。
2008年,CR-02在6000深海进行试运行,这次实验的成功,使得我国在自主式水下机器人领域的实力再次提高一大截,达到了国际先进水平。CR-02形体并不大,主体呈圆柱状,5米左右长度,尽管其下潜深度较CR-01并无增长,但其续航能力是一个较大亮点,可达25小时,定位精度也在20米以内。CR-02的某些技术指标明显超越CR-01,其用途更为广泛,不仅可用于海底矿产资源的勘探,还可作为定点调查设备在某些特殊情况下使用。
“十二五”期间,在中科院沈阳自动化研究所和其他国家科研单位的联合下,“潜龙”系列自主式水下机器人问世,这一系列相较之前研发的自主式水下机器人,其功能更加强大,主要用于深海矿产资源的勘探作业。同样是在“十二五”期间,“探索”系列自主式水下机器人也被研发出来,主要用于海洋科学研究。
军用方面,我国有智水系列智能水下机器人,该系列更为“聪明”,能进行一定程度的智能识别与智能控制。具有较强的路径跟踪控制功能,主要用于扫雷、巡查方面。
我国在水下技术方面进展很快,但在自动化程度、制造工艺、信息技术、智能控制等方面还是与西方强国有着较大差距,所以在AUV实际应用上仍有较多限制。而向外国购买AUV,不仅消耗大量资金,还不一定适用于我国海域范围。海洋是一个巨大的藏宝矿,对其进行开发刻不容缓,面对国际上日益激烈的竞争,开发更先进更实用的AUV技术也是十分关键。
1.3.2 国外研究现状
通信能力不断增强,人工智能方面研究也渐渐进入应用阶段,自主式水下机器人的实用性得到飞速提升。自主式水下机器人可用于侦查、反潜、作战等方面,在军事上有极大的优越性,得到了世界各国的重视[3]。
美国作为自主式水下机器人研究走在最前列的国家,拥有多个著名的相关研究机构,美国海军空间和海战系统中心便是其一,无论国际知名的自游者2、还是极为实用的无人驾驶搜索系统,都出自该机构。自游者2主要用于运输其他自主式航行器,成鱼雷型,属于无人驾驶水下航行器。无人驾驶搜索系统是一种极为强大的集控制与通信系统,该系统能在6000米水下与控制中心正常通信,反应速度极快,只要常规系统的1/10。
麻省理工学院作为世界知名学府,于自主式水下机器人方面研究同样出名。ODYSSEY自主式水下机器人作为其代表性成果,续航能力较为优秀,最长可达24小时,其两侧各有一个电推进器,转向灵活,速度较一般自主式水下机器人更为迅速。
英国方面,自主式水下机器人的研制主要由国防研究局承担,2009年,英国政府出资研制的自主式水下机器人首次参与展览,该自主式水下机器人由三家公司联合研制,用于极地科研项目,该自主式水下机器人是用鱼雷壳体改进而成,额定航速度5kn,由于主要用于极地研究,工作深度不深,只有300m,但能续航一天半,航行范围极大,最大航程能超过300千米。其导航系统,不仅能准确测量航向,还能实时监控测量航速,对于潮汐海流等造成的航行偏差,也能及时纠正,保证其始终能朝预定航向行驶。
在日本,自主式水下机器人的主要用途有两种:地震预报和搜救,但其研究成果不可小觑,由日本研制的“海沟号”,最深下潜记录达到10000多米,创造了世界之最。
前苏联自主式水下机器人的研发始于上世纪70年代,主要研究成果体现在材料研发上,并对其他国家的自主式水下机器人研发起到一定的促进作用。
1.3.3 自主式水下机器人发展趋势
小型化:现阶段的自主式水下航行器主要用于军事和科学研究,其体形一般都较大[4]。随着越来越多的组织与企业涉足相关领域,自主式水下航行器或许可以用于商业、娱乐或者个人兴趣方面,就如同电脑一般。随着各种先进技术的突破或产生,自主式水下航行器的研发也会受到相应的促进,技术的进步与发展带来的结果往往是事物的更加便捷的使用与更为低廉的成本,体积缩小的、价格更低的自主式水下航行器显然能更为方便隐蔽的执行一些关于探测、监测、取样、摄像等任务。而目前,主要限制自主式水下航行器体积的因素主要在于能源技术与控制技术。
群体化:一般来说,自主式水下航行器都是单独执行任务,但有些时候,一台自主式水下航行器明显有些力不从心,面对这种状况,往往需要多台自主式水下航行器进行协作。如何更好地控制多台自主式水下航行器有序而高效的进行合作,无疑是以后的一个极为关键的研究方向,该领域涉及到更稳定高效的控制方式与通讯网络。
远程化:海洋面积太大,随着海洋探索范围的不断增大,能够进行远程任务的自主式水下航行器必不可少。
智能化:现代社会,很多东西都在向智能化过度,如百度研发的车辆自动驾驶技术,小米的对智能家居的产业布局等,智能化是人类发展的一个趋势,是一个拥有巨大潜力的领域。一个能智能识别物品或信息、能自主地进行信息处理与判断甚至能自主进行科研活动的自主式水下机器人所能发挥的作用,无疑是巨大而十分有价值的,任何国家都不可能忽略。
1.4 研究内容
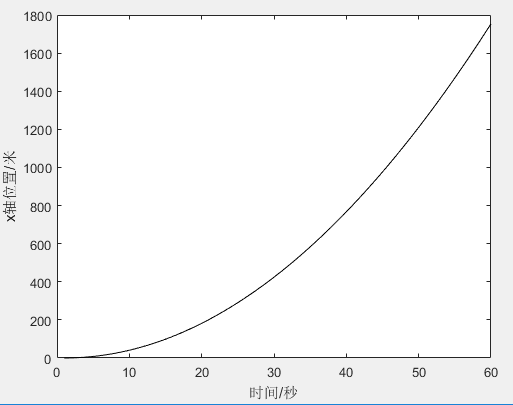
高精度的路径追踪能力是自主式水下机器人的核心之一,本文主要叙述一种关于自主式水下机器人路径跟踪器的设计与仿真原理。通过水下声波测距方法:TOA测距技术,可以实时测得自主是水下机器人与参考点之间的距离,而通过基于TOA测距技术的三点定位方法,则可以实时获得自主式水下机器人的位置坐标。通过上述方法获得到的自主式水下机器人的位置与距离,可以作为UKF算法的观测量,根据自主式水下机器人的运动状态,计算出其明确的状态方程,即可借此进行UKF算法的编程,不断地迭代实时更新的观测量与预测量,最终实现进行路径跟踪的目的。
本文分为6个章节,叙述了自主式水下机器人路径跟踪器的设计与仿真过程。
第1章分为5小节,第1小节交代了课题的研究背景,主要基于资源问题进行分析;第2小节表明了研究该课题的目的与意义;第3小节则是较为详细的叙述了国内外自主式水下机器人的研究现状与发展趋势;第4小节简介了课题的研究内容;最后一小节对第1章内容进行了总结。
第2章分为4小节,前3节分别介绍了标准卡尔曼滤波算法、扩展式卡尔曼滤波算法与无迹卡尔曼滤波算法,前者适用于线性模型,后两者适用于非线性系统;最后1节是对三种算法进行简单的比较与总结。
第3章分为3小节,第1小节明确了路径跟踪器的设计理念;第2小节是对路径跟踪器进行建模;最后1小节是对本章的总结。
第4章分为3小节,详细的分析了路径跟踪器的仿真结果,将涉及的路径跟踪算法进行了对比,并对此进行了总结。
第5章是对本设计的经济性和环保性分析,简单分析了其经济上的优势以及对环境是否会造成损害。
第6章,对全文进行了深刻的总结,指出了本次设计的不足,简单的提及以后研究方向。
1.5 本章小结
本章主要讲述了研究课题的背景与意义,包括对自主式水下机器人的介绍、国内外发展状况与发展趋势。总的来说,我国的自主式水下机器人的整体技术处于世界前列,但是对比一些世界强国(如美国)还是有较大的差距,这些差距并不仅仅是一个领域内的,在包括着控制、制造、材料等各个领域内我国与世界强国都有差距,这也导致我国在自主式水下机器人的应用方面有许多困难。
路径跟踪是指在有限的已知条件下,对自主式水下机器人的路径轨迹来进行有效的估计,得到接近真实轨迹的结果,根据这个结果,可进行包括避障、导航等方面的指令。这是自主式水下机器人最重要的部分之一,一直都是研究热点,每一次有新的更有效的算法或方式被发现,都会带来巨大的技术进步。
最后,本章简述了本文的研究内容,对论文结构进行了梳理,明确了本文的具体方向与工作。
第2章 路径跟踪算法
2.1 卡尔曼滤波(KF)算法
“滤波”一词是通信理论术语,是一种筛选出有效信息的手段。比如,用GPS系统追踪一辆在道路上行驶的汽车,你可以得到一些时刻的汽车的位置,由此,你可以计算出汽车在某个时刻的位移、速度和加速度,你甚至可以根据以上信息,大致预测出汽车在下一个时刻的位置。但是,GPS的误差可能在几米到几十米甚至上百米,光凭GPS你得到的数据与真实数据相差可能较大,导致你所预测的结果误差极大,如果,你通过某种方法,将GPS的误差缩小,得到接近真实数据的结果,这种缩小误差的过程其实就是一种滤波过程。简单地说,滤波就是减小无用信号的作用,让有用信号凸显出来,提取出真正需要的有用的信息。
“滤波理论”简而言之,是指对信号进行滤波的方法,越是优秀的滤波理论,其得到的估计结果,在整体上就越是接近真实值。目前的滤波理论,主要有两个方向,一个方向是用频域方法对数据进行处理,另一方向则是从时域着手。两种方向都出了不少成果,比如维纳滤波理论,便是基于前者设计,卡尔曼滤波理论则是基于后者。
卡尔曼滤波理论一经发表[5],便在相关领域引起巨大的震动。卡尔曼理论本质上是一种对线性系统或数值进行估计的计算理论,由于其原理与作用与“滤波”一词有异曲同工之妙,学术界普遍称其为卡尔曼滤波理论,或是直接将其叫做卡尔曼滤波器,因为卡尔曼滤波算法得到的结果与真实值整体上最为接近,也被称为最优估计算法之一。
卡尔曼滤波算法公式只有五个[6],极为简洁精炼,其最受人赞赏的优点之一,便是对观测数据的更新处理,在算法步骤的循环中,真实数据不断被纳入算法,能对估计值有效的修正,得出更为准确的结果。在通信中,能用于有用信号的还原与加强,比如数字图像的处理与还原。在导航中,能用于定位与路径追踪。在控制领域,可用于无人船的航迹优化与控制。甚至还能用于天气或地震的预报方面。
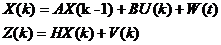
卡尔曼滤波算法步骤如下:
- 。X、Z是系统状态量与观测量,A、B、H是系统参数,可根据具体的运动状态建模得到,U是系统控制量,没有控制量时,该参数可以为0,W和V指过程噪声和测量噪声。
以上是毕业论文大纲或资料介绍,该课题完整毕业论文、开题报告、任务书、程序设计、图纸设计等资料请添加微信获取,微信号:bysjorg。
相关图片展示: