多船会遇局面仿真与碰撞风险动态计算研究毕业论文
2020-02-19 14:59:03
摘 要
大量的海事研究数据表明,绝大多数的海上船舶碰撞事故都是由于人的操作失误而造成的,尤其是在多船会遇的情况下,船舶操纵者的责任十分重大,若不小心做出错误的判断和操作,很有可能将会导致碰撞事故的发生。影响多船避碰决策的因素众多,并且它们之间往往相互影响和制约。因此,分析多船的会遇局面以及避碰的机理,充分考虑影响避碰的各个因素,对其碰撞风险进行动态计算是至关重要的。本文在前人的研究基础上,提出了一种继续模糊综合评价方法的船舶碰撞风险评价模型,对多船会遇局面进行了划分与仿真。该模型综合考虑了影响船舶碰撞风险的主要因素,实现了对碰撞危险度的定量计算。通过会遇局面仿真结果分析表明,该方法能比较精确的计算船舶在各种会遇局面中的碰撞危险度,为船舶采取避碰行动提供决策依据。
关键词:多船会遇;碰撞风险;模糊综合评价
Abstract
A large number of maritime research data show that the vast majority of Marine collision accidents are caused by human error, especially in the case of multi-boat vessels, and the responsibility of the ship manipulator is very significant, and if the wrong judgment and operation are made by the wrong heart, it is likely that the collision will occur. There are many factors that affect multi-ship avoidance decisions, and they often affect and restrict each other. Therefore, it is of great importance to analyze the mechanism of multi-boat situation and the mechanism of collision avoidance, to consider the various factors of the collision, and to carry out dynamic calculation of the collision risk. Based on the previous research, this paper puts forward a model of the collision risk evaluation of the ship, which continues to fuzzy comprehensive evaluation method, and the division and simulation of multi-ship situation. This model takes into account the main factors affecting the risk of collision of ships, and realizes the quantitative calculation of collision hazard. Through the analysis of the simulation results of the situation, this method can accurately calculate the collision risk of the ship in various situations, and provide the basis for the decision of the ship to avoid the collision.
Keywords:multi-ship encounter;collision risk;fuzzy comprehensive evaluation
目 录
第1章 绪论 1
1.1选题背景和研究意义 1
1.1.1 选题背景 1
1.1.2 研究的理论意义与应用价值 2
1.2国内外研究现状 2
1.2.1 国外研究现状 2
1.2.2 国内研究现状 3
1.3本文研究的主要内容 4
第2章 船舶避碰基本机理 5
2.1多船会遇局面的划分 5
2.1.1 多船会遇局面的界定 5
2.1.2 多船会遇局面的划分 6
2.2碰撞危险的定义 8
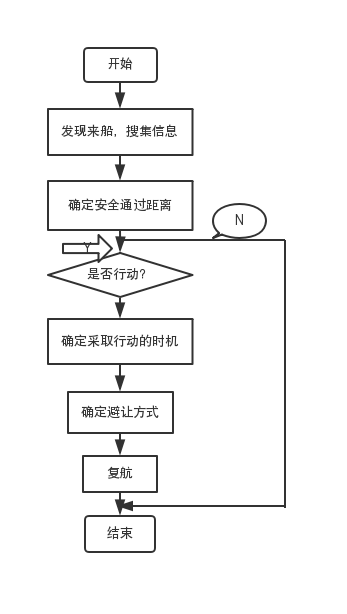
2.3避碰过程及决策原理 9
2.3.1船舶避碰过程 9
2.3.2 避碰决策原理 10
2.4碰撞危险度的计算方法 10
第3章 基于模糊综合评价的碰撞危险度模型 12
3.1 建模思路与方法 12
3.1.1 模糊数学基本原理 12
3.1.1 基于模糊综合评价建模思路 13
3.2 评价模型的建立 14
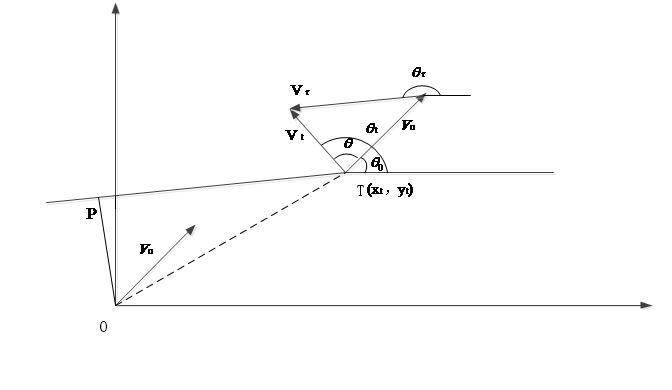
3.2.1 DCPA与TCPA的计算 14
3.2.2 基于模糊综合评价的碰撞危险度计算 15
第4章 仿真与结果分析 19
4.1仿真实验设计 19
4.1.1 仿真实验的实现 19
4.1.2 会遇局面仿真设计 19
4.2仿真结果分析 21
4.2.1 计算结果 21
4.2.2 结果分析及避碰决策 22
4.2.3 最佳决策方案的确定 22
第5章 总结与展望 25
5.1 全文工作总结 25
5.2 经济性分析 25
5.3 对未来的展望 26
参考文献 28
致 谢 30
第1章 绪论
1.1选题背景和研究意义
1.1.1 选题背景
随着世界经济和贸易全球化的快速发展,水路运输凭借其具有占地少、基础设施投资费用较低,以及运量大、成本低、污染轻等优点,在国际贸易和全球综合运输系统中发挥着举足轻重的作用[1]。也正因此,随着世界经济的全球化,海运船舶的数量不断增加,水路运输比以往更加拥挤。显然,这种情况会增加船只相撞的风险。船舶操纵人员面临着大量的的作业数据和信息,尤其是多船会遇时的作业数据和信息。
现在,船舶驾驶员可以经由雷达、自动识别系统(AIS)等途径获得四周船舶的交通数据。然而,与预期相反,过多的信息会分散警官的注意力,并经常导致错误的决定。在大多数船舶上,数据和信息必须在手工和心理上进行关联,这是一个费力并且容易出错的过程。船舶操作中的人为失误是致使船舶之间产生碰撞的重要因素之一。国际海事组织(International Maritime Organization)指出,在80%的船舶事故中,人为失误是一个偶然的事实[2]。船舶一旦产生碰撞,不单单会使船体受到严重的损伤、货品受损,造成庞大的经济损失,更有甚者,造成船毁人亡,对海洋环境形成不可逆转的严重污染。
船舶碰撞会造成庞大的生命财产损失,对海洋环境造成负面影响。虽然全球定位系统(GPS)、自动雷达标绘辅助系统(ARPA)、自动识别系统(AIS)、电子海图显示与信息系统(ECDIS)等先进的辅助系统已经开发并安装在船舶上,但碰撞事故仍然时有发生[3]。另外,现今大型船舶的成长对碰撞风险的评价也提出了更高的要求。因此,提高船舶的情报和自主能力,帮助船舶安全、快速地做出决策,避免可能发生的碰撞是十分重要的。
据2018年交通运输行业成长统计公报表现,该年共产生运输船舶水上交通事故176件,降低10.2%,死亡失踪237人,增长24.7%,沉船83艘,增长3.8%。而对于海上船舶航行安全的情形,中国海上搜救中心公布的2018年8月份中国海上搜救情况显示,仅2018年8月份,中国海上共计发生碰撞险情29起,占险情总数的17.3%。根据相关的海上船舶碰撞事故分析报告表明,船舶操纵人员安全意识淡薄,在船舶航行过程中与他船相遇时对于碰撞危险的评估不足,没有及早的去采取相应的避碰行动,在遇到危险情况操作不当是导致碰撞事故发生的主要原因[4]。调查分析结果显示,80%的船舶海难事故是由人为因素造成的。
通过以上材料数据可以发现,不管是生命财产安全还是对海洋环境造成严重污染,船舶碰撞事故所带来的危害是非常巨大的,而人为因素是造成碰撞事故产生的主要原因。因此,对多船会遇局面进行仿真分析,充分考虑影响船舶避碰的各个因素,对其碰撞风险进行动态计算研究,从而做出合理的避碰决策是一个非常重要的研究课题,本文的设计便是在此背景下展开研究的。
1.1.2 研究的理论意义与应用价值
本文的主要目的是研究一种船舶会遇时对于碰撞风险的理论算法,在考虑各种影响因素的前提下,实现对船舶碰撞危险度的定量计算,并通过在MATLAB环境下对船舶会遇进行仿真,验证其有效性,从而为船舶避碰行动提供理论依据,减少船舶碰撞事故的发生,提高船舶避碰的准确性。在设计之初,通过对各种船舶碰撞风险评价与避碰算法的理论研究进行比较总结[5][6][7][8],本文确定了研究的方向和目标。通过对船舶碰撞风险评价方法的比较与研究,本文最终采用模糊综合评价方法实现对碰撞危险度的计算,同时考虑各种影响碰撞风险大小的因素,对算法进行改进与完善,以实现对碰撞风险较为准确合理的客观评价。
在实际海事活动中,判断船舶之间是否存在碰撞危险不仅仅取决于两船间的DCPA(最近会遇距离)与TCPA(最近会遇时间),还取决于两船之间的距离、船速比等因素,并且还要考虑当时船舶航行所处水域的情况、能见度状况、船舶的操纵性能以及驾驶员的熟练程度等人为因素的影响[9]。因此,本文对于综合考虑各种因素对碰撞风险参数的计算研究不仅有着理论出发点上的意义,还具有有一定的实际应用价值。本文所研究的内容,可以为实际航海中对于碰撞风险的评价提供一种可能性,从而为多船会遇时决策提供参考性的依据,减少因碰撞事故而造成的不必要的损失。
本论文深入研究多船碰撞风险的评价方法,基于船舶操纵运动数学模型对多船会遇局面进行仿真分析,选取不同风险参数,实现动态实时计算,针对计算所得船舶信息选择合理的可视化手段,动态揭示多船会遇情形下,碰撞风险的变化过程,以及与船舶操纵方式的关系。论文的研究旨在帮助船舶作业人员在面临多船会遇局面时进行合理且有效的避碰决策,从而减少船舶操纵中的人为失误,确保运输过程中的生命及财产安全。
1.2国内外研究现状
1.2.1 国外研究现状
西方各国从事航海事业的历史比较悠久,国际上现行的一些技术和公约都是他们制定的,在船舶避碰领域他们的研究也比较深入,并取得了许多成果。最开始是英国的 University of Liverpool(利物浦大学)和日本的 Tokyo University of Marine Science and Technology(东京海洋大学,原东京商船大学)首度将人工智能中的专家系统引入到船舶自动避碰领域,并成功装备上船[10]。而后美国、德国、荷兰等国也相继开发出各具特色的船舶自动避碰系统。
英格兰的利物浦理工大学开发的避碰系统是启发式的避碰专家辅助决策系统[11]。该
系统的底层资料来源包括《1972年国际海上避碰规则公约》、船员的操控经历、避碰专
家提出的避碰理论以及海事法庭对船舶碰撞责任的认定。以此为基础,该系统将两船会
遇的态势归纳、总结为6种态势,对应这6种态势,系统提出了与之对应的14种可以采用的避碰方法。那么在一种会遇态势对应了好几种可以采用的避碰方法,这时选用若
干具体参数来对各种避碰方法进行评判,选取其中的最佳方法,能够完成在宽阔海域范
围内的多艘船舶之间避碰顺序的决策。
东京海洋大学将避碰辅助决策系统应用到学校的学习训练船舶“汐路丸”号上,并且
与船舶的操纵系统相关联,基本实现了探测、决策、执行的完整全自动避碰过程[12]。这
个自动避碰系统包括了五部分:船舶模拟部分、避碰航迹线表示部分、避碰专家部分、
避碰预定计划部分和自动标绘部分等。该系统的底层资料来源同样包括《1972年国际海
上避碰规则公约》和船员的操控经验,采用的避碰理论是几何避碰理论。该系统同样能
够完成在宽阔海域范围内的多艘船舶之间避碰顺序的决策。
近年来国外有韩国的 Jin-Hyeong Ahn 等基于神经网络和模糊集理论,应用模糊神经算法建立了船舶避碰专系统[13]。Lokukaluge P. Perera 等建立了船舶交通监控信息系统,土耳其的 Ugur Simsir 等学者基于神经网络建立了避碰决策支持系统,能够预测船舶三分钟后的位置,从而判断是否有碰撞危险,结合 VTS 进行播报预防船舶碰撞[14]。
1.2.2 国内研究现状
我国由于自明初之后的封建时期航海事业几乎没有得到发展,建国之后的一段时间内又由于航海实力薄弱,受到先进国家的技术封锁,船舶避碰领域的研究水平与世界先进水平存在着一定的差距。但自改革开放以后,我国大力发展科学研究,许多学者在避碰领域也有一定的研究成果。哈尔滨工程大学、大连海事大学、上海海运大学、武汉理工大学、海军广州舰艇学院、集美大学等国内具备船舶研究能力的大学在学习世界先进避碰理论的同时提出了有我国特色的研究成果,并取得了斐然的科研成果。
海军的广州舰艇学院开发出我国第一套船舶避碰系统,该系统将两船的会遇态势总结划分为:正面相遇、右向交叉、左向交叉、从左船舷追越、从右船舷追越和两船追逐等六类态势[15]。该系统采用的避碰方法包括:定速定向、右转向避让、右转向避让同时减速、左转向避让、左转向避让同时减速、调整船速和紧迫行动等七类。该避碰系统选取了:两船会遇距离 DCPA、两船会遇时间 TCPA、两船位置和两船距离等四类参数,通过计算得出船舶的碰撞危险系数,同时由碰撞危险系数确定避碰决策、方法和执行。
集美大学的李丽娜教授带领的研发团队在船舶避碰领域提出了船舶拟人智能避碰决策(Personifying Intelligent Decision~making for Vessel Collision Avoidance,简称PIDVCA)理论,并且由该理论研制开发了船用智能避碰导航仪(简称 VICAN)[16]。这套系统底层资料来源于《国际海上避碰规则》、《船舶操纵与避碰》、船舶驾驶员的实践经验知识(来自驾驶员问卷调查等咨询方式),采用人工智能的数据处理方式实现专家经验知识的定性分析。同时这套系统还利用船载的各类传感器对现场环境进行感知以获取环境信息,这些信息同样通过人工智能的数据处理方式完成分析、推理、评价的定量计算。该系统已基本具备同时避让 2~4 个危险目标船的避让效果。
1.3本文研究的主要内容
本论文深入研究船舶碰撞风险评价方法和避碰决策机理,对不同的多船会遇局面进行仿真,重点解决多船会遇时碰撞风险的动态计算、多船会遇下的避碰决策等问题。具体的说,研究主要包含以下几个方面的内容:
(1)深入研究多船会遇避碰决策机理,了解船舶碰撞风险的评价方法,对多船会遇局面进行划分。
(2)在现有船舶运动数学模型的基础上,设计不同多船会遇方式,进行仿真分析,动态计算风险参数,分析如何通过不同风险参数的计算来评价船舶之间的碰撞风险。
(3)基于MATLAB软件,将船舶轨迹数据和风险参数等数据图形化,选择多种动态交互可视化手段,揭示在多船在会遇过程中,碰撞风险的变化过程。根据多船会遇局面的划分,设计多组实验,对多船会遇局面进行仿真,实现对碰撞风险的动态计算,通过多种可视化手段揭示船舶风险的变化过程,总结和分析实验结果。
第2章 船舶避碰基本机理
2.1多船会遇局面的划分
2.1.1 多船会遇局面的界定
《国际海上避碰规则》(以下简称《规则》)对船舶会遇形势的的划分以及双方责任义务的确定,基本上都是以两船相遇为前提条件的。当多船相遇,并且存在碰撞危险时,其并没有做出明确的规定。按照国际上对《规则》的解释,多船会遇是会遇形势的特殊情况。在海事中遇到多船会遇致两船或多船之间有碰撞危险时,船舶工作人员一般是参照《规则》的相关规定并且依据良好的船舶操纵技术与经验,采取对应的避碰行动以避免碰撞事故的发生。
船舶会遇态势分为两船会遇(Simple Encounter Situation,简称S)和多船会遇局面(Multiple Encounter Situations,简称M),其中两船会遇就是《规则》所规定船舶会遇态势,包括互见中和能见度不良时两种情况,而多船会遇局面只适用于《规则》第二条责任条款,并没有具体规定。在此,本文结合《规则》相关条款和目前研究成果,对多船会遇局面界定如下:在一定水域内,当三艘及以上船舶相互接近时,若本船同时与各目标船均形成两船会遇;或者本船仅与其中一艘目标船形成两船会遇,但因其他目标船的存在,本船所必须采取的避碰行动受到限制,则称本船处于多船会遇局面。其含义主要包括:
(1)多船会遇局面的界定是以两船会遇及其避碰要求为依据和基础;
(2)对于多船会遇局面中的各船, 至少其中两船之间已形成两船会遇, 或几个两船会遇叠加而成。
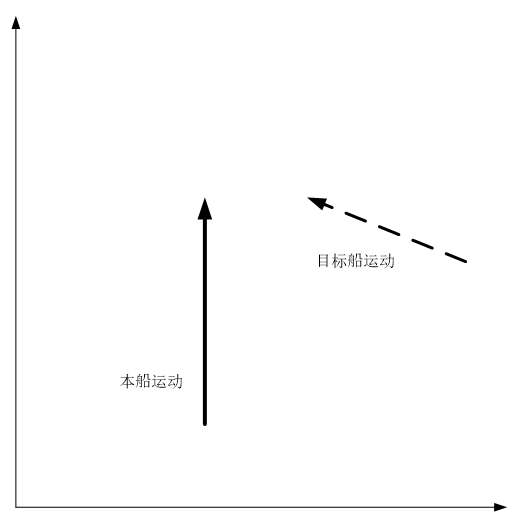
(3)当本船同时与各目标船均形成两船会遇时,则此时本船所处的会遇态势是多船会遇局面。如图2.1左图所示,A与B形成对遇态势,而与C形成左交叉态势,则此时A处于多船会遇局面中。
(4)当本船仅与一艘目标船形成两船会遇,但由于其它目标船的存在,致使本船的避碰行动受到限制时,则本船所处的会遇态势也属于多船会遇局面。如图2.1右图,A仅与B形成对遇态势,但由于C的存在,A向右转向的避碰行动受到限制,则此时A也被认为处于多船会遇局面中。
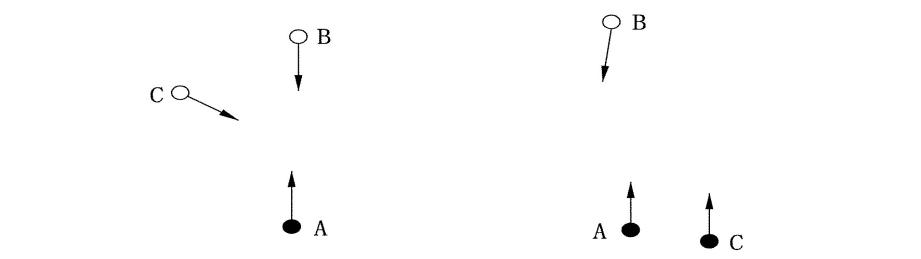
图2.1 多船会遇局面示意图
(5)多船会遇局面是以本船为参考进行判断的,这与船舶会遇态势判断的实践相符合。对于多船会遇局面中的各船,可能有些目标船仅处于两船会遇中。如图2.2所示,A处于多船会遇局面,而B、C均处于两船会遇中。
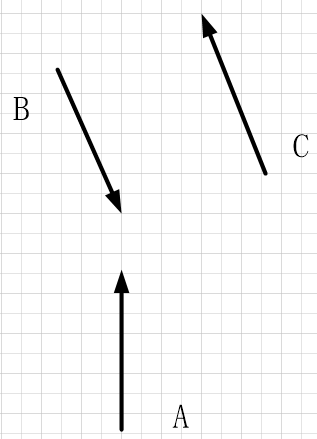
图2.2 多船会遇局面示意图
以上是毕业论文大纲或资料介绍,该课题完整毕业论文、开题报告、任务书、程序设计、图纸设计等资料请添加微信获取,微信号:bysjorg。
相关图片展示: