船舶航向控制系统交互式平台设计研究毕业论文
2020-02-19 14:58:57
摘 要
随着现代海洋资源开发和物流业的发展,航运自动化水平的不断提高,对船舶操纵和控制提出了更高的要求。船舶运动控制问题是控制领域的研究热点,从事该项研究的专家学者日趋增多。但是由于船舶运动模型的复杂性,研究人员需要花费大量时间在船舶建模、仿真等重复性工作上,这对研究进度和效率有很严重的影响。因此设计一个交互性强、操作简单易学的控制平台是十分有必要的。
本文设计的平台是基于MATLAB GUI(图形用户界面)技术开发的。图形用户界面是提供人机交互的工具和方法。MATLAB用一个包含多种不同控件对象的图形窗口代表用户界面。用户通过调整控制的属性来使界面统一美观,通过对提供操作的控件对象进行编程来使用户在GUI中的行为达到相应的目的。MATLAB GUI是一种新型的图形用户界面开发方式,特别适合能够熟练运用MATLAB语言进行仿真但是对VC界面开发了解不够深入的研究人员。
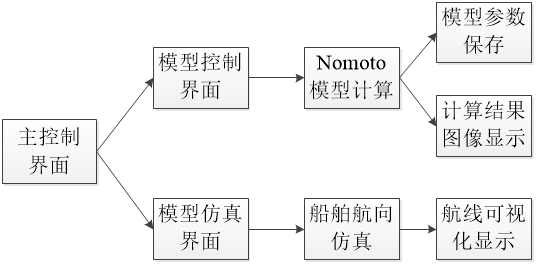
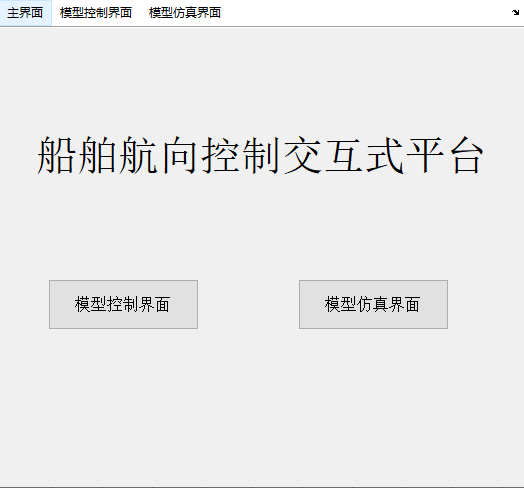
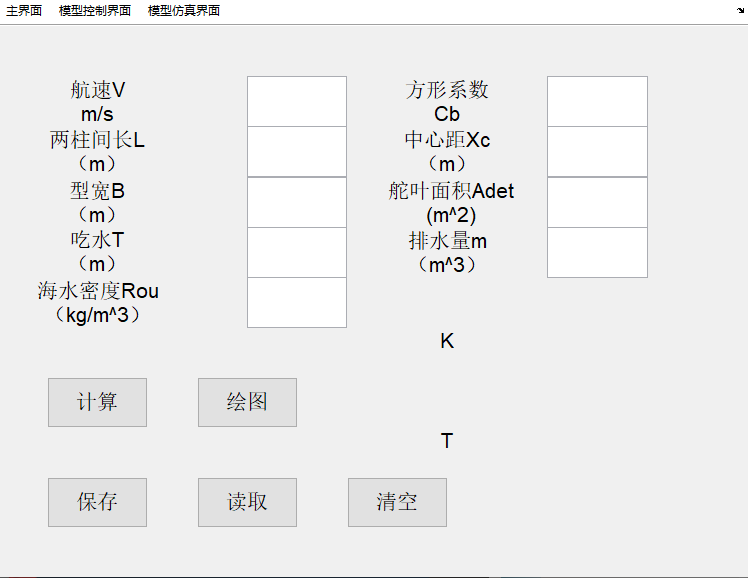
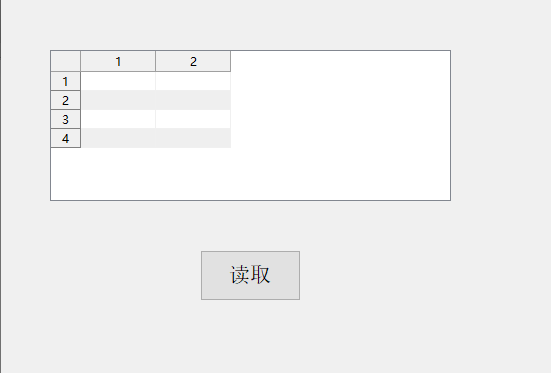
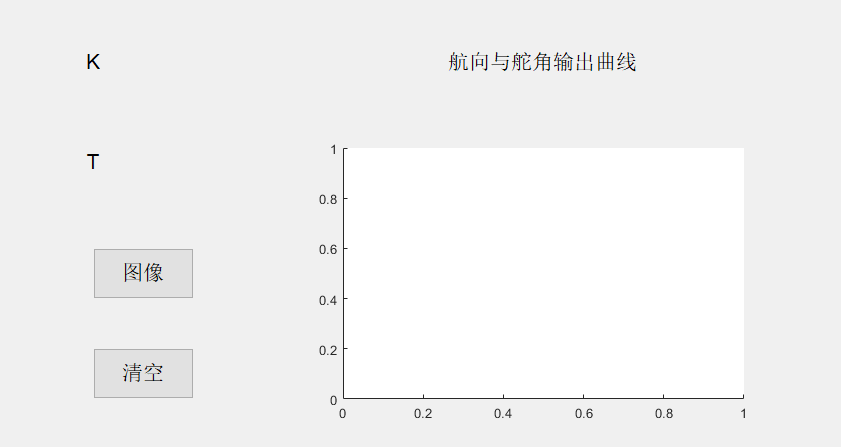
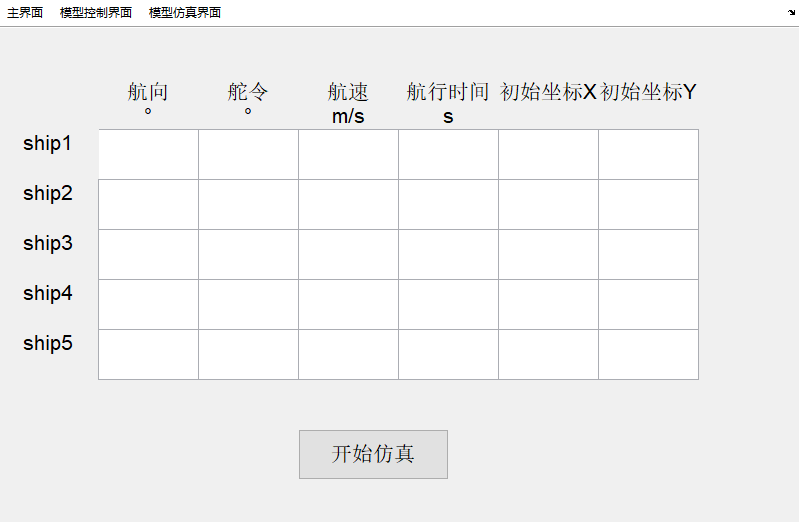
本论文所设计的船舶航向控制交互式平台主要包括船舶模型的建立、船舶航向的可视化仿真等功能。在本次设计中给平台设计3个界面分别是主控制界面、模型控制界面和模型仿真界面。在模型控制界面进行船舶Nomoto模型的计算,通过输入船舶参数运行算法来计算公式参数,然后得出航向与舵角间关系图像,来观察该船航向的变化是否能被有效的控制。在模型仿真界面可以通过输入舵令等参数来观察船舶航向运行及变化情况。
本次设计开发了船舶航向控制交互式平台,集成了建模、算法及可视化仿真功能,提高了对船舶航向控制研究的工作效率。实现了航向运动的仿真和结果的可视化,可以直观地观察和了解船舶运动特性。
关键词:船舶航向控制;GUI设计;航向仿真
Abstract
With the development of modern marine resources and logistics industry and the continuousimprovement of shipping automation level, higher requirements for ship manipulation and control have been put forward. The problem of ship motion control is a hot research topic in the field of control, and more experts and scholars are engaged in this research. However, due to the complexity of ship motion model, researchers need to spend a lot of time on ship modeling, simulation and other repetitive work, which has a serious impact on the research progress and efficiency.Therefore, it is very necessary to design a control platform with strong interaction and easy to learn.
The platform designed in this paper is based on MATLAB GUI (graphical user inter-face) technology. Graphical user interface is a tool and method to provide human-computer interaction. Matlab represents the user interface with a graphical window that contains a variety of different control objects. The user adjusts the properties of the control to make the interface unified and beautiful, and through the programming of the control object that provides the operation, the user's behavior in GUI can achieve the corresponding purpose. MATLAB GUI is a new graphical user interface development method, especially suitable for researchers who can skillfully use Matlab language to simulate, but do not know enough about VC interface development.
The interactive platform of ship course control designed in this paper mainly includes the establishment of ship model, the visual simulation of ship course and so on.In this design, three interfaces are designed for the platform: the main control interface,the model control interface and the model simulation interface. The Nomoto model of the ship is calculated at the model control interface, and the formula parameters are calculated by inputting the running algorithm of the ship parameters, and then the relationship image between the heading and the rudder angle is obtained to observe whether the change of the course of the ship can be effectively controlled. In the model simulation interface, the ship course operation and change can be observed by inputting rudder command and other parameters.
The interactive platform of ship course control is designed and developed, which integrates modeling, algorithm and visual simulation function, and improves the working efficiency of ship course control research. The simulation of heading motion and the visualization of the results are realized, and the ship motion characteristics can be observed and understood intuitively.
Key words: ship course control; GUI design; course simulation
目 录
第1章 绪论 1
1.1 论文研究背景与问题提出 1
1.2 国内外研究现状 1
1.2.1 船舶运动控制算法发展 1
1.2.2 船舶运动数学模型发展及现状 3
1.3 课题的目的及意义 4
第2章 船舶航向控制交互平台设计基础 5
2.1 GUIDE平台概述 5
2.2 GUI编程实现 6
2.3 对平台设计的需求分析 6
2.4 船舶运动模型 7
2.5 平台的概念模型 8
第3章 平台界面设计 9
3.1 主控制界面 9
3.2 模型控制界面 12
3.3 模型仿真界面 15
第4章 平台编程实现及仿真 17
4.1 主控制界面跳转编程实现 17
4.2 船舶模型计算 18
4.3 船舶航行模型仿真 21
4.4 本章小结 26
第5章 结论 27
5.1 总结 27
5.2 经济性分析 27
参考文献 29
致谢 31
绪论
论文研究背景与问题提出
当今社会,伴随着科技技术的飞速发展,在船舶航行方面也相应的需要船舶驾驶人员提升自身对船舶航向控制方面知识的理解和掌握,因此在各国多个航海院校都广泛的引进航海模拟器进行教学培训。我国大连海事大学在20世纪80年代初,引进雷达和轮机模拟器,开始运用航海模拟器在学校内进行教学培训,是我国第一所运用航海模拟器教学培训的学校。随着时间的推移,航海模拟器以其良好的仿真性能和多样的仿真环境,并且价格较低,在我国得到了广泛推广,被多所大学引进并且使用。在2006年,大连海事大学成功研制出了属于自己的高品质航海模拟器,并且该模拟器成功通过了交通部的鉴定,得到DNV(挪威船级社)的A级(最高级别)性能认证,这标志着我国具有了独立研发航海模拟器的能力,意味着我国对航海模拟器的研究总体上达到国际先进水平。成功研发出自己的航海模拟器打破了发达国家对市场的垄断,这一科研成果极大提高我国在科学研究的国际地位[1]。
但是,因为技术和设备的不成熟,所有的航海模拟器都存在一定的问题。一方面是航海模拟器本身的不足,比如对船舶模型的仿真性不足;图像仿真性不足;系统不稳定;设计标准不统一等等[2],另一方面则是非航海模拟器本身的原因,如模拟器其本身的计算机系统和仿真设备的结构复杂,购买和维修成本高,同时利用该模拟器进行仿真试验还有软件程序使用方面的限制[3]。
航海模拟器无论是在学校进行教学培训使用,还是在科研组织中进行科学研究等多个方向都有很重要的意义。但是对于学生进行试验来说,航海模拟器太过于昂贵而且不适用于短暂的教学,因此很有必要设计一个操作简单,成本较低的针对性实验平台来进行普通的船舶控制教学实验。
国内外研究现状
1.2.1 船舶运动控制算法发展
船舶控制其本身是一件枯燥乏味的事,而且还会遇到长距离的远洋航行或者在暴风暴雨的恶劣天气,船舶控制更是十分艰难。随着燃油的价格升高,航行的成本增加,对于船运企业来说,他们期望能够更高精度的控制船舶航线来节省燃油,但是这样增加了船舶操作人员的工作量,他们也希望能通过船舶控制器来实现船舶的自动控制来减轻他们的工作量[4]。
随着技术的发展,船舶控制趋向于智能化、网络化、数字化及模块化。其中船舶航向控制问题是控制领域的研究热点。在实际的航行中,船舶航行时的控制有两个模式,分别是:航向保持和航向调整[5-6]。对于不同的航行模式来说,需要有不同的控制方式去实现,如在航向保持模式下,要求在船舶发生航向偏移的第一时间调整舵角到设定的航向并且要保证航行的经济性和绿色性;在航向调整模式下,要求能控制船舶平稳,快速,无超调的调整到预定航向上。
航向控制系统是船舶运动控制系统至关重要的一部分,船舶的航向控制分为手动控制和自动控制[7],通过改变舵角来改变航向。当船舶由手动控制时,需要舵工亲手来操作舵轮,才能实现舵角的改变,并由此来改变船舶的航向,虽然手动控制比较复杂,但是在如今的科技水平下,很多时候仍然需要手动控制,特别是在遇到恶劣天气下船舶偏离航线或船舶启航时,仍然要靠手动控制来操作。
从20世纪初开始,自动舵就在各国学者的研究中不断的发展着。20世纪20年代,美国学者Sperry所在的斯佩里公司[8]和德国学者Ansuchz所在的Aushutz公司[9]各自独自研制出机械式船舶航向自动控制系统,即自动舵。到了1949年美国学者Schiff引入微分控制概念,创建了一个用比例和微分一起控制船舶航向的系统,这被称为是第一代自动舵。进入20世纪50年代,多种科学技术的快速发展,导致了运用比例、微分、积分联合控制的PID自动舵应运而生,PID舵以其良好的控制性能和较高的精度被广泛使用,在20世纪80年代以前,几乎所有船舶都采用PID航向控制系统,并且随着智能算法的快速发展,多种与智能算法相结合的船舶控制方法快速形成,并且被使用于试验中[10-12]。
但是由于海况环境变化的突然性和复杂性,船舶的动态参数会因为环境而发生改变,导致无法建立准确的船舶运动模型,利用PID算法的自动舵控制策略在处理环境对船舶控制的干扰时,没有很好的效果,所以需要有一种新的技术来帮助解决这个问题,于是在2006年,维奥雷尔·尼古劳等人决定在设计船舶运动控制器时运用了定量反馈理论,从而来解决该问题,保证闭环系统的鲁棒性能要求[13]。定量反馈理论是一种有很高实用价值的鲁棒控制设计方法,它将经典控制理论中的频域设计思想扩展应用到了不确定被控对象的鲁棒控制设计[14]。
1.2.2船舶运动数学模型发展及现状
在20世纪60年代末,荷兰的J.V.Amerongen等人开始了船舶自适应控制舵的研究并成功研制出自适应控制舵的样机,经过测试后,发现该样机能很好的满足航向控制的要求,用来控制航向的第三代自动舵就此诞生。20世纪80年代开始,我国多家制造厂商与上海电器厂合作,研制出了我国首个自适应航向控制系统,并且成功通过了技术鉴定,安装在大型远洋船舶上进行使用。这之后,伴随自动控制的快速发展,在船舶工程领域上多种多样的智能控制方法开始被使用。为了提高船舶航向控制器的性能,同时研发出更多更好的只能航向控制其,人们开始尝试将自动舵设计成具有自适应、自学习、自优化、自整定的能力,这种自动舵即为第四代智能舵,它对船舶模型存在的非线性、不确定性干扰和量测噪声具有良好的鲁棒性[15]。
建立船舶运动数学模型是研究船舶运动状态的核心问题[16],在自动舵发展的同时,从20世纪30年代开始,为了更好的研究船舶运动,船舶运动数字模型被国外学者提出并且开始研究。1946年美国学者戴维森和许夫经过研究后发表的一篇学术论文中提出了第一个船舶运动方程,这为后面船舶运动数字模型的提出奠定了基础[17]。在这之后船舶运动数学建模开始飞速发展,并且船舶运动模型的建立主要分两个方向:响应型模型和状态空间型模型。
以日本学者野本谦作为代表的响应型模型将船舶看成是一个动态系统,通过从实际试验中获取各种需要的参数,然后将这些数据运用经典控制论进行分析[18]。
状态空间型模型分欧美学派和日本学派。以美国麻省理工学院阿布科维茨教授为代表的欧美学派运用整体型模型结构进行船舶运动数学模型的建立,将船体、螺旋桨、船舵三个部分看成一个整体,将作用在船体上的流动力展开,变成各运动变量的泰勒级数,然后通过船模实验获取流体动力导数[19]。这种将船舶部件整体化的建模方法建立的模型较完整严密,而且精度较高。但是这种方法也有缺陷,如耗费巨大不利于广泛使用;流体动力导数不通用,不能在所有船舶上运用试验数据;不能将船模与实体船间的关系很好的阐述清楚。日本学派使用分离型模型结构(MMG)进行船舶运动建模,以日本学者小川、井上、平野等人为代表,这些学者认为建立模型需要有以下原则:船舶各个部分的单独性能是建立模型的基础;模型需要能够简洁明了的船舶各部分之间的干涉效应;能将作用于船舶上的流体动力合理表达出来[20-21]。根据分离型模型结构构建的船舶模型,有以下几个特点:各项流体动力导数都有各自明确的物理意义;可以更好的通过实验求得数学模型中各项系数;可以帮助处理模型与实船的问题;能用于常规船舶运动模型,也能用于更大范围更加复杂环境下的船舶运动[22-23]。但是分离型模型结构依然需要大量经验公式才能建立模型,还是比较复杂。
上述建模方法在对船舶的操纵性能进行仿真时,都采用的是三个自由度的平面运动数学模型。为了能更简单的描述船舶模型,我国学者孙景浩于1981年提出了利用四个自由度来描述船舶运动模型的观点,并且利用该模型也能更好的对船舶操纵性能进行仿真,此外为了更好的研究与描述船舶运动模型,Bailay等人提出了名为“统一数学模型”的6自由度数学模型。
课题的目的及意义
由于船舶航行条件多变以及船舶本身驱动结构的特性,船舶的航行具有长时间停滞,船舶本身有很大的惯性,非线性运动等特点,这对于设计一个可靠性和性能都很高的仿真模拟器带来了是一个很大的挑战。此外,对于不同的船舶模型,在建模、设计和性能评估等工作的过程中,如果相同的建模方法不断被使用,那么这将会是一个不断进行重复且繁琐工作的过程,会耗费大量的研究时间。因此,设计一个简单易懂易操作的船舶航向交互式平台是一件很有意义的工作,它可以帮助人们理解船舶操纵系统从而更快的设计出优秀的船舶控制器。
计算机辅助设计技术通过利用软件和辅助设备来帮助人们更快的设计出所需要的技术,自从上世纪八十年代以来,计算机技术就在控制系统的分析和设计中拥有重要的地位[25]。MATLAB等辅助软件已经在世界范围内被广泛应用于辅助分析与计算工具,利用这些软件能有效提高科学研究中的工作效率如数据分析、模型仿真、系统设计等。计算机辅助设计技术在船舶设计领域也起了很大的作用,帮助实现了很多设计,为了帮助设计出好的船舶仿真平台,国内外多个研究中心设计出了很多辅助工具,并且测试后实用性很高,取得了很好的工作效益。
MATLAB是一个很强大的计算软件,而且还具有界面设计功能[26]。本次设计利用MATLAB GUI平台研究船舶航向控制系统交互式平台,GUI是MATLAB中一个非常重要的交互式设计工具。GUI通过移动放置控件如按钮、文本框来创建用户界面,随后在各界面的M文件中设置运行程序段来进行计算或者绘图得到想要的结果[27]。通过GUI平台设计一个船舶控制交互平台是一项很有意义的工作:集成模型算法,简化仿真步骤,提高工作效率;模块化和可视化设计,帮助研究人员掌握系统特性。
第2章 船舶航向控制交互平台设计基础
2.1 GUIDE平台概述
MATLAB是一套高性能的数值计算和可视化软件,可以用于算法开发,数据可视化显示、数据分析以及数值计算。MATLAB的基本数据单位是矩阵,利用MATLAB进行算法计算等工作时,所使用的指令是生活中比较常用的,所以相同的问题由MATLAB来解算比用C,FORTRAN等语言便捷的多, 并且它也吸收了多种计算软件的优点,使得其成为强大的数学软件。
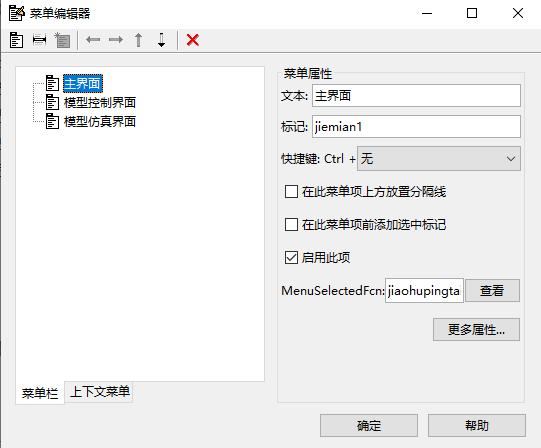
本次设计采用的是MATLAB中的GUIDE。GUIDE是一个交互式的设计工具,该设计工具是为了帮助制作图形界面,它是一套MATLAB的工具集,包括版面设计工具、属性编辑器、菜单编辑器、调整工具、对象浏览器、TAB次序编辑器六部分组成。
以上是毕业论文大纲或资料介绍,该课题完整毕业论文、开题报告、任务书、程序设计、图纸设计等资料请添加微信获取,微信号:bysjorg。
相关图片展示: