基于机器视觉的并联机器人贴片控制系统设计毕业论文
2020-04-12 14:11:51
摘 要
并联机器人在20世纪90年代引起了广泛关注。与串联机器人一起构成工业机器人的重要组成部分。 它在食品,医药,电子等轻工业中应用最广泛,在材料处理,包装和分类方面具有无可比拟的优势。 在过去的两年中,随着并联机器人在市场上的应用日益广泛,它已成为工业机器人需求增长的新力量。
与串联机器人相比,并联机器人的静平台由三根以上连杆连接,拥有更高的刚度,并且有较强的稳定性;并联机器人的驱动装置可以安放在靠近机架的位置,可以有效避免其对机器人运动过程的干扰,减小了系统的惯量,提升了动力性能;而且大多数并联机器人在设计过程中采用对称式的结构,Delta机器人便是其一,他们的各项同性好,互换性也较高。
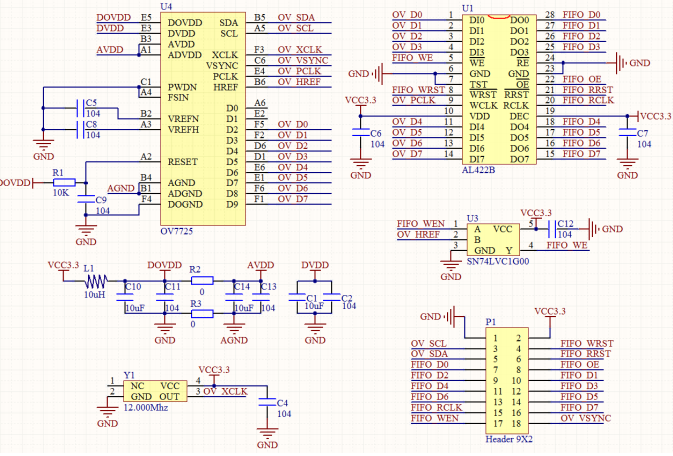
本文提出了一种基于机器视觉的Delta机器人贴片识别与放置系统的设计,本文首先提出了Delta机器人的硬件系统设计,包括运动控制系统电路、接口电路、摄像头模块、硬件选型和Delta机器人的机械结构设计。然后讲解了Delta机器人运动学逆解的算法并提供实例。接下来讲解了机器视觉图像处理的相关算法和调试OV7725摄像头模块时遇到的一些问题。最后,画出了Delta机器人控制的系统流程图,并进行了程序的编写,控制Delta机器人能够按照要求进行运动。
关键词:Delta机器人;运动学逆解;机器视觉
Abstract
Parallel robots have attracted wide attention in the 90s of last century. It has the advantages of high stiffness, fast speed, strong flexibility and light weight. It is an important part of the industrial robot together with the serial robot. It is widely used in light industries such as food, medicine and electronics, and has an unparalleled advantage in handling, packaging and sorting materials. In recent two years, with the increasing application of parallel robots in the market, it has become a new force for the growth of industrial robots.
Compared with the series robot, the end platform of the parallel robot is supported by a number of connecting rods at the same time, the stiffness is larger and the structure is more stable. The driving device of the parallel robot can be placed near the rack, avoiding the position interference during the motion of the robot, reducing the inertia of the system and improving the dynamic performance. In parallel, the symmetrical structure is adopted in the design of the parallel robot, which has good homosexuality and high interchangeability.
In this paper, the design of a Delta parallel robot based on machine vision is proposed. In this paper, the method of component identification and location based on OV7725 camera module is proposed. In this design, the Delta robot is clamped with its application components. Secondly, according to the structural characteristics of Delta robot, the inverse kinematics formula of Delta robot is expounded. Then, according to the structure characteristics of the Delta parallel robot based on machine vision, the hardware system and interface circuit of the parallel robot are designed in Delta. Finally, the control program of the Delta parallel robot is written, and the STM32 is communicated with the servo driver normally to drive the Delta machine to drive the mechanical structure of the robot.
Key Words Delta robot; inverse kinematics; machine vision
摘要 I
Abstract II
第一章 绪论 1
1.1引言 1
1.2国内外研究现状 2
1.3研究的目的及意义 4
第二章 总体方案设计 5
2.1基本内容和目标 5
2.2技术方案及措施 5
第三章 Delta机器人硬件系统设计 7
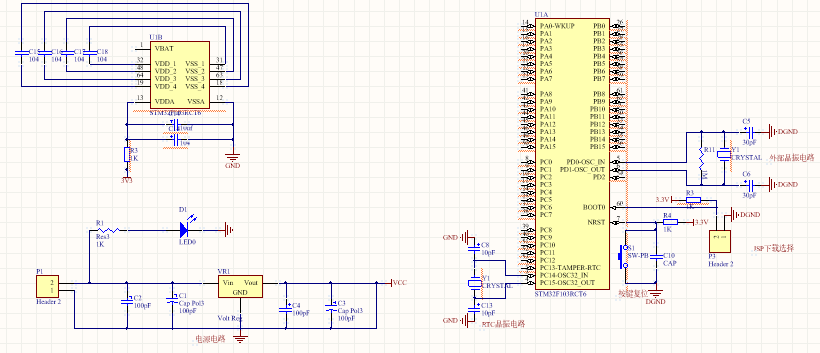
3.1STM32最小系统 7
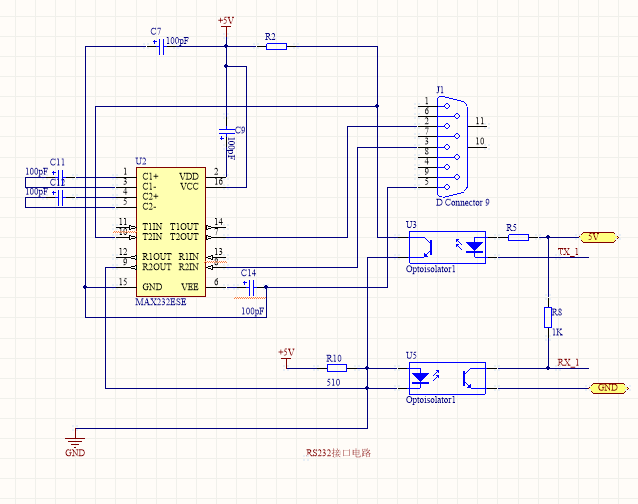
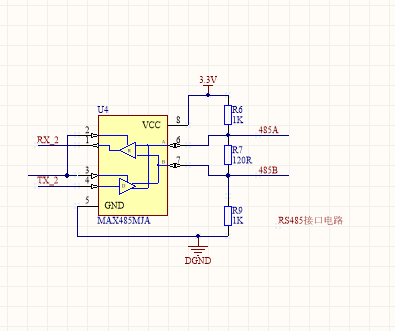
3.2接口电路 7
3.3摄像头模块 8
3.4电机选型 10
3.5 控制装置选型 11
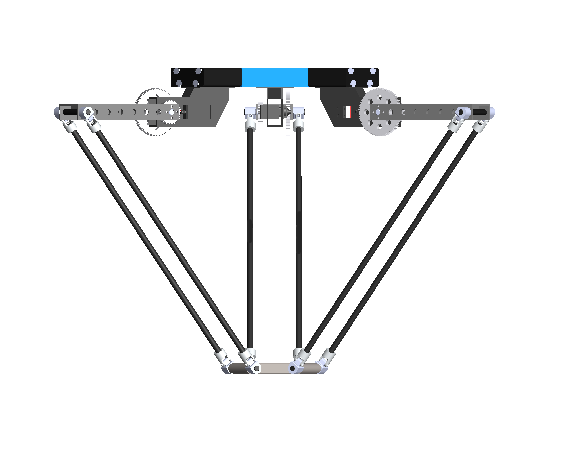
3.6 Delta并联机器人机械结构 11
第四章 Delta机器人运动学逆解算法设计 12
4.1运动学逆解原理 12
4.2运动学逆解算法实现 14
第五章 元件识别与定位程序设计 16
5.1图像的灰度处理及二值化 16
5.2基于摄像头的单目视觉位置标定 16
5.3OV7725调试过程中的难点 19
5.3.1OV7725的时序图 19
5.3.2采集图像思路 19
5.3.3 关于OV7725的图像存储和读取 19
5.3.4 调试OV7725所遇到的问题 20
第六章 Delta并联机器人控制程序设计 21
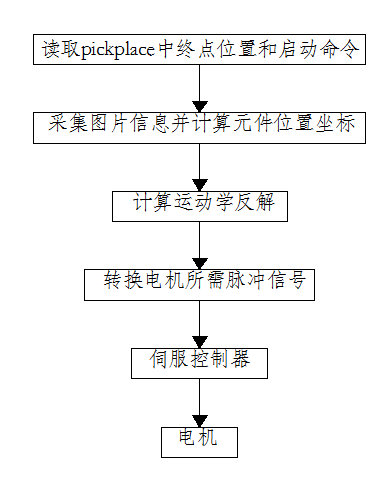
6.1Delta并联机器人控制流程 21
6.1.1总体控制程序流程 21
6.1.2 STM32控制程序流程 22
6.1.3元件识别与定位流程图 22
6.2串口通信程序 23
6.3 STM32控制程序 25
6.3.1 OV7725图像采集程序 25
6.3.2 电机控制程序 25
结论 27
参考文献 28
附录 30
致谢 85
第一章 绪论
1.1引言
Delta机器人是一种并联机器人,最早由法国博士Clavel[1]提出,并以倒三角形和希腊字母(intelligative tower)的结构命名。Delta机器人是具有三个平动自由度的并联机器人。因其属于高速、轻载的并联机器人,常利用其下端动平台搭载轻量的物体进行快速的操作。经过几十年的发展,并联机器人发展出了越来越多的机械结构,比如4个或6个自由度的并联机器人[2]。其中一些机械机构通过在Delta机器人的末端添加连杆构成非对称的并联机器人,以达到增加其自由度的效果。或者通过四个主动臂的并联耦合来实现平移和旋转。通过这种方法也在很大程度的提升Delta机器人的工作能力。
 Clavel提出的delta机器人模型
Clavel提出的delta机器人模型
本世纪初,Delta机器人的专利保护到期,所以近年来国内外不少机器人公司都开始了推出自己开发的Delta机器人。比如德国的ELAU 公司联合 PWB 制造了 ELAU Robot P3;日本的Fanak开发了M-1 iA(2009)(基于2009年以来的delta机构)、 M-2 iA(2010)、 M-3 iA(2012)机器人。日本的川崎最近也推出了delta机器人。很明显,Delta 机构在三维空间内高效的物流解决方案推动了各国机器人公司就该机构的开发热潮。
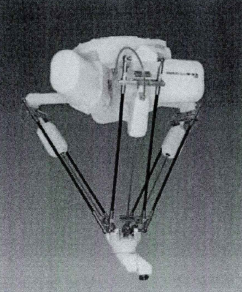
 ABB IBR360 FlexPicker机器人 Funuc M3-il机器人
ABB IBR360 FlexPicker机器人 Funuc M3-il机器人
 Adept Quattro S650机器人 Asyril PocketDelta机器人
Adept Quattro S650机器人 Asyril PocketDelta机器人
图1-2 几种常见的Delta工业机器人
1.2国内外研究现状
1)Delta机器人运动学建模
关于Delta机器人运动学的标定方法,主要原理就是Delta机器人的正解和逆解。运动学正解的原理是已知Delta机器人的位于上方的定平台与三个主动臂夹角角度,在三个主动臂与从动臂的联合作用下,求出Delta机器人下方动平台末端位置相应地到达的位置坐标。逆解是指在给定了Delta机器人的末端位置之后,计算与该位置相对应的,三个主动臂与定平台夹角的角度。由于对Delta机器人的研究已经接近30年,已经有许多研究学者将其以不同算法表示出来。本设计要求Delta机器人能将贴片从当前位置移动到指定位置,所以主要研究的是运动学逆解算法。
通过简化Delta并联机器人模型,赵杰提出了Delta机器人的空间几何解法。得到了一个简单,直观,快速的Delta并联机器人运动学正解求解算法[ 3 ]。其他如LIU使用非线性方程组搜索消元算法[4],和神经元网络算法[5],该方法消除了约束方程的未知数,该方法非常复杂,但能得到所有解。杨强等人利用D-H方法]建立了各关节的坐标系,并进行了Delta机器人的逆运算[6]。该方法具有奇异位置[7],当数据点在奇异点处被收集时,无法识别出错误参数。为了解决这个问题,Judd提出了一种改进的D-H方法,称为MDH建模方法[8 ],它引入了旋转变量。然而,这种方法仍然存在奇异点,比如连杆平行时。
以上是毕业论文大纲或资料介绍,该课题完整毕业论文、开题报告、任务书、程序设计、图纸设计等资料请添加微信获取,微信号:bysjorg。
相关图片展示: