基于超声波测距的车载安全系统设计毕业论文
2020-04-08 14:27:30
摘 要
本文介绍的是以超声波测距为手段的车载安全系统,本文中给出了系统的硬件和软件设计。本系统的设计目的是用超声波测距显示出车辆与四周障碍物的距离,从而避免车辆事故。该系统根据超声波测距为原理,以AT89C52为核心,将单片机模块,数码管模块,蜂鸣器模块,超声波测距模块,通过keil编的“c”文件来完成测量距离的目标,当距离小于期望值时,蜂鸣器实现报警功能。本设计的核心就是超声波测距模块,利用的是超声波传感器。该系统可以提高汽车行驶过程中的安全性,减小与障碍物发生碰撞的概率,在将碰撞时发出警报以保证人的行车安全。
关键词:超声波传感器; AT89C52; 防撞; 车载安全系统
Abstract
This paper introduces the design of vehicle safety system based on ultrasonic distance measurement, this paper presents the design of system hardware and software design. The system is designed to show the vehicle and obstacle distance using ultrasonic ranging, so as to avoid traffic accidents. The ultrasonic ranging system according to the principle of taking AT89C52 as the core, the single-chip module, ultrasonic ranging module, buzzer alarm module and four digital tube display module, written by keil files to achieve the measurement distance when the distance is less than the expected value, the buzzer alarm function. This design is the core of the ultrasonic ranging module, using the ultrasonic sensor. The system can improve the safety of the vehicle in the process, reduce the probability of collision with the obstacle, alert in the collision so as to ensure the traffic safety of the people.
Keyword: ultrasonic sensor;AT89C52; Collision avoidance; Vehicle safety system
目录
摘要 I
Abstract II
第1章 绪论 1
1.1课题研究背景及意义 1
1.2国内外车载安全系统的研究现状 1
1.2.1国内车载安全系统研究现状 2
1.2.2国外车载安全系统研究现状 2
1.3本文主要内容及章节安排 2
1.4本章小结 4
第2章 硬件设计 5
2.1系统方案选择 5
2.1.1传感器选择 5
2.1.2超声波时序图 6
2.2单片机系统设计 7
2.2.1单片机的选择 7
2.2.2单片机最小系统 8
2.3超声波测距模块 9
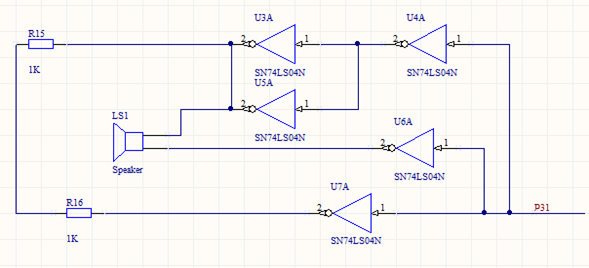
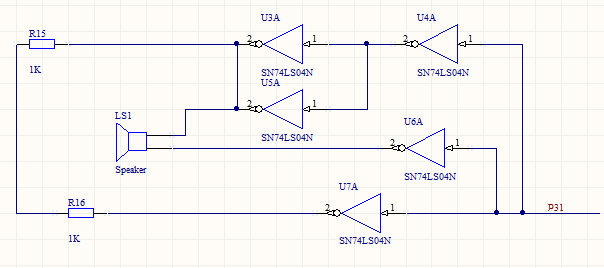
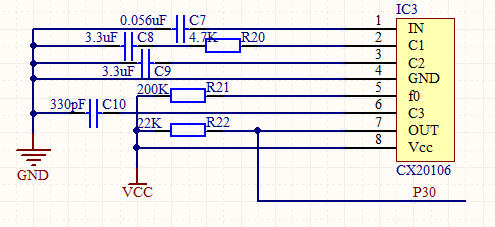
2.3.1超声波发射电路和接收电路 10
2.3.2超声波传感器SRF04 13
2.4 显示报警模块 13
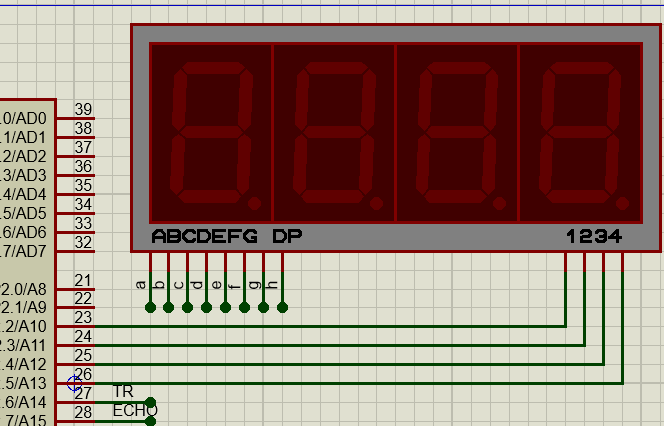
2.4.1数码管显示模块设计 13
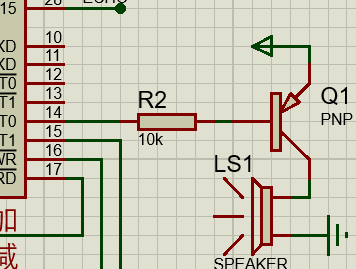
2.4.2报警模块设计 14
2.5本章小结 15
第3章 软件设计 16
3.1主程序设计 16
3.2中断处理程序 17
3.3显示模块设计 17
3.4报警模块设计 18
3.5本章小结 20
第4章 仿真与调试 21
4.1系统调试及仿真 21
4.2系统误差分析 22
4.3本章小结 24
第5章 总结 25
致谢 27
参考文献 28
第1章 绪论
1.1课题研究背景及意义
伴随着十九大的展开,我国经济实力不断发展,国际地位提高,我国公民越来越习惯于乘坐汽车出行,上班上学都是如此,群众对汽车的需求是日益增加了,但是城市道路的建设无法跟上经济的发展和车辆速度的增长,城市中车辆数量的爆炸性增长,而道路建设无法跟上,这个情况无疑是严重增加了交通压力以及出行压力,也因此,引发了非常多的行车安全问题。有些驾驶员反应速度不够,无法及时刹车,造成了车辆间的碰撞,一些驾驶员,对前方的车辆,没法做出合理的预判,导致刹车不及时,也引发了车辆间的碰撞,于是本文考虑到,如果所有的驾驶员都拥有一个能够计算出与前方车辆间距离的仪器,并且在危险的时刻能够自动报警,那么是不是就能避免很多的交通事故呢?是不是就能给很多新手司机带来更多的安全呢?那么此时就需要设计这么一个使用超声波传感器,测量距离的安全系统现在,实现车距的显示和安全车距的提醒。正常行驶时,能够显示车体前、后、左、右与其他车辆的距离;当汽车与其他车辆的距离较近时,自动发出语音报警。由此系统可以在语音的提醒下合理减速防止碰撞,并且可以预测两车必然发生碰撞的情况,提前打开安全气囊减小车辆碰撞对人身体的伤害。
1.2国内外车载安全系统的研究现状
汽车安全防撞,包括很多方面,比如说紧急制动系统,在驾驶员未来得及刹车时会自动紧急刹车,或者说倒车防撞系统,在驾驶员没有意识到自己倒车将碰到障碍物的时候,汽车会自动检测距离然后刹车,还有类似于,疲劳驾驶提醒功能,当驾驶员的连续驾驶时间到了一定时间,便会提醒驾驶员停止驾驶,报警持续一段时间后停止,还有大家熟悉的黑匣子等等功能,而本文这里要讲的防撞系统是防撞加预警功能,在驾驶员前方出现车辆时,这个系统能自动测量与前方车辆之间的距离,在距离过小达到了危险距离之后,会开始警报,下面也会给出一些国内公司研发的此类系统,当然国外公司研发的类似系统也有陈述。
1.2.1国内车载安全系统研究现状
自20世纪90年代中期以来到现在十九大的展开,中国开始跟踪和研究全球智能传输系统(IT)的发展。现阶段,在国家的扶持下,国内有一大批专业汽车企业和汽车研究院所也极力开展了关于车载安全技术的研发工作,包括长春一汽,上海大众,东风汽车,交通部,武汉汽车研究院,清华大学汽车系,北京理工大学机械系,长安汽车学院,吉林大学,东南大学等[1]。但是都这些还都只是探索性的研究,还没有可以批量产生的作品,因为我国开展这类车载安全系统的研究开始的较晚所以还无法和国外的完全媲美。虽然汽车安全防撞系统已经在市场上的需求量很大,但现在只有少数昂贵的汽车(主要是进口车)有这样一个系统[2]。而且在雨、雾、黑夜这些类似的恶劣天气以及坎坷不平的道路或拥挤的马路这些糟糕的路况时,汽车安全防撞系统很难发挥作用,但是此时不就恰恰是最需要它发挥作用的时候吗?安全系统软件这方面最需要改进的地方就是系统算法,需要考虑其雨雪情况[3]。
1.2.2国外车载安全系统研究现状
1986年,德国梅赛德斯 - 奔驰公司启动了普罗米修斯这项计划,许多公司也跟着开启了各种计划。由于微波和综合技术装备的快速发展,防碰撞预警系统在汽车应用领域的应用取得了飞速的发展[4]。名汽车制造商如梅赛德斯奔驰和宝马选择的雷达类型为FM 77-GHz,梅赛德斯 - 奔驰和英国劳伦斯电子联合开发的汽车安全违规预警系统的有效跟踪距离可以和O米一样好,该系统可以提供声光报警信号,并已用于各种汽车,公交车和卡车[5]。福特汽车有限公司开发的防撞系统具有24 GHz的正常工作频率和106米的有效检测距离[6]。它可以根据车辆方向角度信息调整角度条件,这使得系统只能检测车道中的车辆并避开其他车道上的目标干扰在美国开发的波导公司开发了两种红外红外红外系统系统,红外系统通过扫描各种360度的屏障,并将处理后的信号转换为视频,准确地给出屏障位置,发生碰撞的距离和时间等参数也可以给出警告信号,但假警报率和系统定价高,并且没有实际应用在这个时候。2008年,Rostra的Precision Control开发了一款微波防碰撞传感器,可安装在汽车后部的碰撞杆上。传感器使用微波技术穿透塑料防撞条,雨雪等[7]。有效的物体监控距离是汽车后方4米,以及汽车前后左右。
1.3本文主要内容及章节安排
上文说过了要达到的目标就是在前面出现车辆之后,自己这边的驾驶员可以看得到前面车辆和己方车辆之间的距离,而且当前面车辆和自己车辆之间距离过短有安全隐患的话,会直接报警,消除隐患。想达到这个目标,首先需要一个单片机,来作为整个系统的大脑,完成控制工作,其次,需要一个测量距离的手段作为四肢,经过权衡选择了使用超声波,还有为了让驾驶员能够看到与前方车辆的距离,无疑需要一个显示装置,这里本文选择了数码管作为显示器,最后为了实现报警功能,本文选择了蜂鸣器。
论文构成主要由以下部分组成:
第一章中,首先是对这个系统的背景,发展情况,发展前景以及他的重要性做出了介绍,经过对国内外发展情况的对比,由此可以明白车在安全系统的重要性以及发展现状。
第二章中,则介绍了该课题的硬件设计,介绍了超声波传感器的选型和监控报警选择。然后介绍了单片机应该选什么型号,这个型号有什么功能,分析了超声波传感器工作系统,接着进行了超声波电路的设计,之后完成了数码管的动态显示的电路,最后使用了蜂鸣器的报警电路。
第三章主要介绍了本系统的软件设计,其中包含了最核心的部分也就是主程序的部分,这个部分是单片机主控部分,然后其他的还有中断程序用于停止技术并开始下次技术,显示程序,用于数码管的显示,最后还有就是报警也有一个随距离变化蜂鸣器频率的程序。
第四章是全文总结,包括对系统的调试,protues的仿真,以及系统不足之处的分析,其中的系统调试和仿真都以图片的形式给出,至于系统的不足之处,则通过列举的形式一一给出了,最后本文给出了自己对自己设计出来的系统的评价,也分析了自己做这个的优点和缺点。
1.4本章小结
这一章是本文的全文的绪论,简要的概括了全文四个章节的内容,为后面三个章节做出铺垫。在绪论中,本文首先写到的是人均收入提高,国力变强背景下,交通变得拥堵,行车安全出现问题,于是车在安全系统应运而生。而后写到的是国外内的汽车公司以及知名研究所在这方面的研究成果。写完这两方面之后,本章进行了对全文的概述,并且大体的介绍了全文绪论,硬件,软件,总结这四个核心部分的内容。其中从本文的硬件设计包含的内容,比如说选择单片机的类型,报警用的什么部件,单片机的引脚,显示数码管的显示模式到本文的软件的各个程序模块的设计,到最后总结全文,对程序调试,对系统仿真,都有了较为清晰的介绍。
值得一提的是,这个部分中的车载安全系统发展现状,引用了非常多的资料,其中包括了许多国内外的公司对这当面都有许多的注资和关注。比如说在我国非常普遍的一汽大众,丰田,清华以及北理也纷纷为之建造了实验室。花了这么多精力,我国获得了巨大进步,但是仍比不上外国的系统。归根结底,完备的防撞系统基本只出现在高端的汽车之上,奔驰汽车和福特公司的大力投资无疑证明了这一点,由此可见,完全而普适的车载安全系统,还任重而道远。
而这次的设计,归根结底只是小打小闹,它能完成的仅仅只是仿真方面的工作,如果应用到实际上的话。是有非常多的缺陷的,等待改进的位置,需要更多考虑的位置,数不胜数。
第2章 硬件设计
2.1系统方案选择
众所周知,测距离可以使用的传感器非常多,其中又以红外线测距传感器,激光传感器以及超声波传感器较为常用,本文在其中势必要做出选择,最终根据传感器的安全性,成本,精确度等方面,本文选择的是超声波传感器。如果就效果而言的话其实激光传感器这个方案不失为更好的选择,因为激光的特性使它成为了测距最好的传感器之一,也广泛用于科研领域,对许多方面做出了不俗的贡献。
2.1.1传感器选择
(1)激光传感器
激光有着单色性高的特点,这都源于它的光的波长分布窄,因此颜色极纯,远超其它光源,而且激光的方向性强,在某个实验中,将激光放射到月球上,其光斑直径也不过2公里,激光的祥干性极好,普通光是不产生干涉的,而激光会产生,是属于相干光。因此,如果由激光器发射激光束,那激光可以说是呈线性并且不散射的,其中波的能量不仅集中还能够传输到更遥远的位置。激光传感器能够使用激光的高亮度和良好的透光性。因此当它开始工作之后,发射出的激光束,达到障碍物,而后被障碍物反射,一些反射回来的激光会被接收器接受,经过放大等处理之后,返回来被接受的信号就可以记录整理出时间了,通过这个方法,就可以用来确定距离障碍物的距离了,也就是说,s=ct/2。这个优点就是可以测量的距离长,速度极快快,测量的精却度高,范围广。然而,这个领域内,激光的使用存在着局限性,这也导致了激光在这个方面无法广阔使用。激光射程很容易受天气条件的影响而产生变化,雾天尤其影响巨大,车辆粗糙度和自身阻力,车辆污染和振动等,也会对激光传感器的使用造成影响,因此,很多情况下,激光的检测精却度和准确性就是难以保证的了,再加上其高昂的造价,使得其难以生产,销售价格也相当高,无法被广泛运用。这个也成了本文并不选择激光传感器作为所使用的传感器的最主要的理由。
(2)红外线测距传感器
红外传感器即通过发射出去的红外线去测量距离,当它遇到近处的障碍物时,会反射较强光,碰到远处的障碍物时,反射光就较弱。基于这个特点,可以用来测量距离。红外线传感器的成本低,而且它的使用安全,也十分容易制造。但是也容易受到天气,仪器精度的影响,因此红外线传感器测距测量的结果会有精度较低的特点,而且它的方向性也是无法保证的,难以实际应用。因此无论是雨雪或者雾霾天,红外线都无法进行精确的工作,这也就成了一个相对最不好使用的传感器选择了。
(3)超声波传感器
空气中,声音传播速度是340m/s,超声波的传播速度与之相同,在一个实验中,超声波向前传播,但是当他碰到木板时,会能在发射处接受一个波,这个就是他反射的波,由此反射的特性,开始利用超声波传感器来测量距离。超声波传感器的测量过程大概如下,与跑步无异,当超声波发射后,计时系统也同时开启,当超声波向前传播碰到前方车辆时,与碰到木板一样,会产生反射波,这时超声回收电路便将声信号转化电信号,并且同时关闭计时器,于是由s=vt/2就能计算出距离了。缺点是,超声波测距仪的测量精度是厘米级的不如激光精确,而且超声波测距传感器容易报错,并且超声波的扩
散消耗较大,传播距离远之后,精度高度下降。但是超声波测距仪的价格合适,也在车载安全保护这方面比较合适,可以应用于实际中。
在上面,本节比较了激光测距,超声波测距和红外线测距三个方式,可以了解到,激光传感器是最理想的选择,它拥有着很高的测量范围,测量精度,以及反馈极快,但是激光测距价格相对较高,也容易受到环境的影响。而红外线测距精度极低,不能保证反应速度和安全问题,综合了精确度,反应速度和经济价格,本文发现,超声白测距用于这方面比较合适,因此超声波传感器无疑成了最合适的车载安全系统测距传感器了。
2.1.2超声波时序图
这个装置的目的就是用来计算超声波在空气中传播的距离,它就是将超声波发射时开始计时的脉冲,到超声波反射波的脉冲在相同时间轴上面转换显示,通过单片机的控制,超声波传感器的发射接收,将其波形都显示到数码管之上。
其时序图如图2.1所示
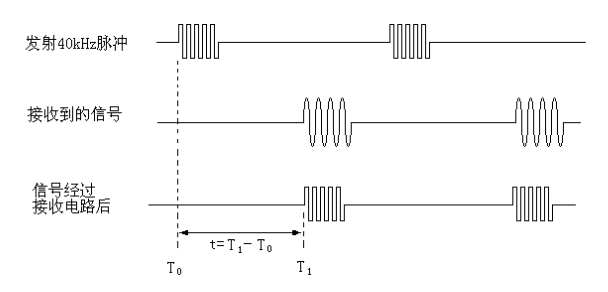 图2.1超声波时序图
图2.1超声波时序图
通过计算t的大小,便可以得知超声波在空气中的传播时间,也可以由此得出距离。
T0时刻,发射出一束方波,启动定时器也于此刻按下秒表计时,超声波往前传播,碰到障碍,反射回来,接收器开始负责接收,这样的接收会产生一个负向跳转,传导到单片机的中断接口,从而启动中断程序,定时器因此停止计数。这就是这个计时模块的工作机理了,由它反馈出来的图中,便能得出时间,从而得出距离。
2.2单片机系统设计
2.2.1单片机的选择
选择单片机无疑是这个任务的最核心工作,因为单片机便是整个系统的控制核心部位,所以首先查阅了资料,需要选一个最合适的单片机,依靠一个合适的单片机,能够使系统的运行达到最简形态,也能简化软件编写,还能简化整体的电路,那么市场上有非常多的不同类型的产够用单片机,本文需要从这些单片机中选出一个合适的,经过单片机的基本性能参数指标,工作温度,存储介质等的考量之后,本文选择了用AT89C52单片机做为本设计的单片机,它是一个与MCS-51 兼容的拥有8字节可编程FLASH存储器,它的寿命是1000写/擦循环,数据保留时间可达到十年,拥有128×8位内部RAM和32可编程输出/输入线,它还有·两个16位定时器/计数器和5个中断源,更具有可编程串行通道,下面图2.2是它的引脚图
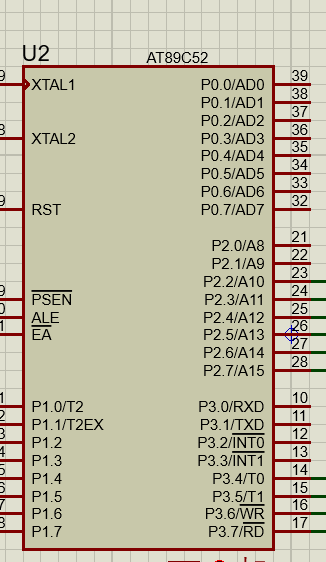
图2.2 AT89C52引脚图
其中包含了VCC提供电压,GND是接地端,RST为复位端,P0为一个8位漏级开路双向I/O口,P1是一个内部提供上拉电阻的8位双向I/O口,P2为一个内部上拉电阻的8位双向I/O口,P3口管脚是8个带内部上拉电阻的双向I/O口,ALE/PROG用于计时作用。/PSEN是外部程序存储器的选通信号,在由外部程序存储器取指期间,每个机器周期两次/PSEN有效,但在访问外部数据存储器时,这两次有效的/PSEN信号将不出现。/EA/VPP是当/EA保持低电平时,则在此期间外部程序存储器(0000H-FFFFH),不管是否有内部程序存储器。注意加密方式1时,/EA将内部锁定为RESET;当/EA端保持高电平时,此间内部程序存储器。在FLASH编程期间,此引脚也用于施加12V编程电源(VPP)。XTAL1则是反向振荡放大器的输入及内部时钟工作电路的输入。XTAL2是来自反向振荡器的输出。
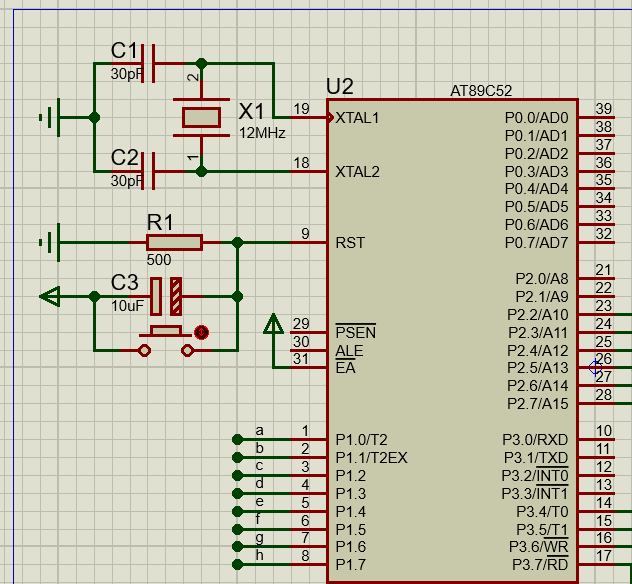
2.2.2单片机最小系统
单片机最小系统是指的能够用最小部件让单片机运行的系统,其晶振由单片机的时钟周期T而决定,VCC和GND是不可缺少的电源和接地模块,它的系统资源十分开放,可以和其他部件自由结合,是本系统中的核心控制模块。
单片机的最小系统如图2.3所示。
以上是毕业论文大纲或资料介绍,该课题完整毕业论文、开题报告、任务书、程序设计、图纸设计等资料请添加微信获取,微信号:bysjorg。
相关图片展示: