高精度测角技术研究外文翻译资料
2021-12-12 21:56:04

英语原文共 6 页
高精度测角技术研究
T. Kojimarsquo;, Y. ahchirsquo;, Member, IEEE, S. selu3,
H. wakiwaka4, Member, IEEE
1T. Kojima, Technical Management, Tamagawa Seiki, Co., Ltd, Nagano, Japan, e-mail: kojima@tamagawa-seiki.co.jp
2Y. Kikuchi, and S. Seki, Technical Managemenf Tamagawa Seikr, Co., La Nagano, Japan,
e-mail: p09290@tamagawa-seik.co.jp seki@tamagawa-seiki.co.jp
4H. Wakiwaka, Faculty of Engineering, Shinshu University, Nagano, Japan, e-mail: wakiwak@gipwc.shinshu-u.ac.jp
摘要:近年来,人们对纳米控制系统的高精度、高分辨率编码器提出了更高的要求。高精度的角度校准仪器被需要并且已经依据行业需求进行了改进。本文所述的角度校准系统对角度进行了超高精度的测量评估。采用同一精度测量系统对圆盘和角度传感器的精度进行高精度标定,由此得到了高精度的角度传感器。该角度标定系统的分辨率为0.001角秒,精度为0.01角秒。采用高精度角度标定系统对角度传感器和圆盘精度进行测量评估和补偿,由此研制出精度高达0.2角秒的编码器。而且角传感器依据相关原理自行标定精度。在以前不可能使用角度校准设备的环境中使用角度传感器是非常有用的。此外,本文还研制出了一个30位的高分辨率角度传感器。将角度传感器应用于纳米技术系统的基础技术得以建立。
I.介绍
光学编码器已广泛应用于半导体制造设备、科学测量系统和纳米技术系统。要在这些领域中使用编码器,需要高精度、高分辨率的编码器,为此对高精度组合件及角度精度测量技术、精度补偿技术、高分度信号技术等进行了研究。
本文研制了一种包含高精度圆盘和联轴器的高精度角度传感器和一套高精度角度传感器的精度评价系统,并提供了带有精度数据的高精度角度传感器的采购。向用户提供准确的数据是为了保证精度和供应高精度角度传感器。高精度角度传感器所面临的问题是缺乏足够的精度评价体系,同时,高精度角度传感器的制造也不能满足需求。尽管高精度角度传感器主要用于空间观测和纳米技术系统等专业领域,但这些问题仍旧存在。由于对高精度角度传感器的需求越来越大,人们对高精度角度传感器的期望越来越高。本文的目标是开发优于行业标准的角度传感器和角度评估系统,本文的目的是开发具有以下特性的角度传感器:(1)高精度磁盘;(2)高精度角度校准系统;(3)角度校准理论对角度传感器的适用性;(4)多功能角度传感器。利用本文所述技术,作者研制出了分辨率为0.001角秒的角度传感器和角度标定系统。
本文包括以下基本技术和所有的角度测量措施。(1)本研究的光电编码器原理,(2)高精度圆盘技术,(3)高分辨率高精度角度传感器,(4)多功能角度传感器,(5)用于角度测量系统的高精度角度标定仪的研制与评估。
II.光学编码器
角传感器分为两种类型:被称为解角器的电磁感应类型和光学编码器类型。解角器的特点是在任何环境下都有极其出色的表现,而编码器的优点是具有高精度。
A.编码器的应用和特点
编码器是位置和速度控制系统的角传感器,同时它被用于控制机械和机器人的电机。因为编码器对于大多数移动物体的角度探测是必须的,所以它不是一种夸张的陈述,同时编码器的研发也是独立的。编码器的特点是直接把角度信息转换为数字电信号,而且在各种角度传感器中,编码器是具有较高精度的传感器。
B.操作原则
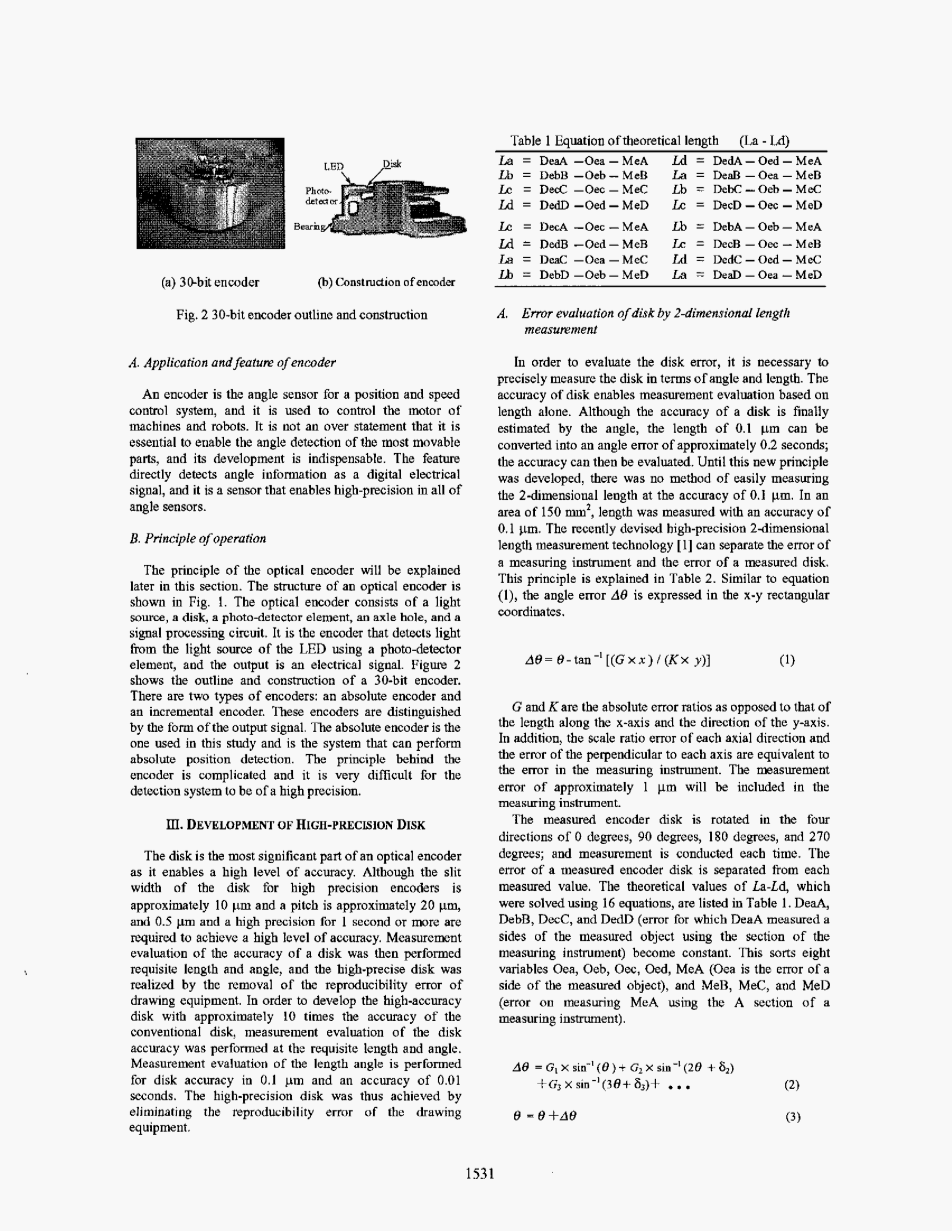
光学编码器的原则将在后面的章节阐述。光学编码器的结构如图1所示。光学编码器包含光源、圆盘、光电探测器单元、轴孔和信号处理单元。编码器利用观点探测单元感应LED光源发出的光线并且输出电子信号。图2展示了一种30位编码器的外形轮廓和内部结构。编码器又分为绝对式编码器和增量式编码器。而编码器的区别在于输出信号的形式。在本文中所研究的就是能够进行绝对位置探测的绝对式编码器。编码器的原理是复杂的而且对于检测系统来说拥有高精度是非常困难的。
III.高精度圆盘的发展
圆盘是一种光学编码器最重要的部分因为它能够提高精确度水平。即使高精度编码器的圆盘的裂缝大约是10mu;m而且齿距大约是20.5mu;m。较高水平的精确度需要达到1角秒或者更小角秒的精度。对圆盘精确度的测量评估是圆盘必须具有必要的长度和角度。较高精度圆盘的研制是通过对绘制设备的再生性误差的移除实现的。为了研制出比传统圆盘高10倍精确度的高精度圆盘,圆盘精确度的测量评估需要必要的长度和角度。对圆盘来说,长度和角度的测量评估是以0.1mu;m的精确度和0.01角秒的精确度为基准的。高精度圆盘通过减少消除绘制设备的再生性误差得以实现。
A.通过二维长度测量的圆盘误差评估
为了评估圆盘的误差,需要精确地测量圆盘的角度和长度。圆盘精确度的测量评估仅建立在长度上。尽管圆盘的精确度最终由角度来估计,0.1mu;m的长度可以转化成大约0.2角秒的角度误差;所以可以由此来评估圆盘的精确度。没有更简单的测量在0.1mu;m精确度的2维长度的方法,除非有新的原理确立。在150mm2的区域内,长度的测量精度可以达到0.1mu;m。最新的高精度的2维长度测量技术可以分辨测量仪器的误差和被测圆盘的误差。该原则可以由表2解释。类似于公式1,角误差△Theta;可以在2维之间坐标系中进行表示。
(1)
G和K分别是相对于X轴和Y轴方向的长度的误差比例系数。除此之外,每个坐标轴方向的刻度比例误差和垂线比例误差等价于测量仪器的误差。测量仪器具有大约1mu;m的测量误差。
被测的编码器圆盘可以在0度、90度、180度和270度方向旋转;而且每次测量都被引导。被测编码器圆盘的误差可以从每次测量值中分离出来。使用16个公式计算出来的La-Ld的理论值都被列在表1中。DeaA,DebB,DebC,和DebD(DeaA使用测量仪器的部分测量的双方的被测目标的误差)称为常数。这样就分离出了8个变量Oea,Oeb,Oec,Oed,MeA(Oea是某个被测目标的误差),和MeB,MeC,和MeD(使用测量仪器的A部分测量MeA的误差)。
(2)
(3)
在上面的公式中G1-G3,是误差增益同时Theta;是角测量的位置。角度的误差是△Theta;并且相对角度的误差是delta;i;因此,公式2和3才能成立。依据此测量原则,测量仪器的误差和编码器圆盘的误差才得以分离。测量工具的误差是1mu;m同时圆盘的误差是0.4mu;m。
B.圆盘精度的测量和测量角度的精度补偿
该测量是通过制作轴孔,以此来固定和使圆盘旋转,从而进行角度的测量。只有通过角度才能评估圆盘的精确度。电信号的准确性也被测量。
在结果中的误差通过与长度相关的误差来估计,与长度相关的误差是利用角度校正系统测量圆盘的角度精准度得来的。
误差是通过长度和角度测量的。所有的测量结果都被认为是合适的误差值。利用从被测圆盘得到的误差数据,每个裂缝绘制角度的位置得以纠正;因此制造精密的高精准度圆盘的绘制设备得以研制。
复制圆盘的转移误差可以使用这些圆盘评估方法来分析,并且一个带有极高稳定度的高精度圆盘能够被廉价地生产出来。
补偿后的高精度圆盘由角度来测量。现在的技术已经制造出了精确度可达0.3角秒的圆盘。
IV.高分辨率和高精度角度传感器的发展
A.使用CAE技术的高精度机械装置
高精度圆盘在机械装置里面被广泛需要。在轴孔和连接件上,CAE(电脑辅助制造)技术被采用并且最佳的高精度圆盘得以分析研制。在轴的负载下,温度改变,而且振动也会改变,机械部分要达到最佳性能就要好好分析,正如图3所示。类似于耦合的方式如图4所示,转移误差作为夹板厚度的一个功能得以分析,而且得以实现最优化。使用耦合的角度传感器的准确性也被展示在图8(b)的左侧。
B.区分电路的信号以实现高分辨率
受机械和光学器件的局限,角度传感器的基础分辨率是215的分辨率。对于高精度控制系统来说需要有228的分辨率。保持一个确定的大约216的比率是必需的;然而,使用阻抗的划分方法216划分是不现实的。
使用最新的信号划分原则,带有划分信号的电路技术的发展得以保证。
使用正弦和余弦波,信号得以区分,可达30位的分辨率得以实现。30位0.001角秒的波形图如图5所示。划分信号的方法如图6所示,划分信号的R/D(解角器/数字信号转换器)如公式4和5所示。
(4)
(5)
K:传送比例,E0:激励电压
w:激励频率
V1,V2:2nd激励电压,:角度位置
C.对于高精度的ROM精确度补偿原则
对于角度传感器的基波准确性,电磁角度传感器的误差由周期信号的电信号的准确性决定。光学编码器的精确度通常由圆盘的精确度决定。然而,元件的误差不为0那么装配误差会增大;因此对于基波准确性来说补偿技术是必需的。
而且,对于正弦和余弦信号波形的精确度误差来说,高分辨率的划分信号也有划分信号误差。这些误差是可再生误差,而且高精度误差测量系统由高精度角度校正系统得以实现。使用ROM补偿可以进行基波型号误差和划分信号误差的精确度补偿。然而,由于分辨率高,因此补偿点有10亿,这个补偿点的数额是非常庞大的。它超过了ROM的容量,所以不能简单地校正精确度。ROM精确度补偿的方法是在ROM里面储存误差值并且通过减去该误差值消除可再生误差。由此,ROM的有效利用得以实现;新型的补偿方法有两种:广泛的补偿方法和局限的补偿方法。两种补偿方法都被混合地表示在图7中。较小的ROM容量的有效使用实现了两种类型的误差补偿方法。一种ROM精确度补偿理论(广泛 局限补偿)如公式6所示。对应基波部分的误差代表的是“广泛误差”并且信号划分误差被设定为代表“局限误差”,整体误差将在下面的公式中表示。
(6)
A1,A2和A3hellip;代表每个误差等级的基波增益;B1,B2,和B3hellip;代表每个误差等级的划分信号增益。T代表误差等级并且N代表基础分辨率。
根据这个原则,1角秒的精确度(图9)和0.2角秒的精确度(图8)分别对应局限和广泛误差。
D.自我校准原则
自我校准原则可以帮准角传感器对自己的精度进行测量评估同时减少自身误差。该原则在角度校准系统不能被使用的环境也就是缺乏角度的机械设备中是相当有用的,框图如图10所示。
奇数误差部分从总误差数据中提取出来是通过从两头也就是0度和180度的绝对误差数据的减法和和变换中实现的。接下来,偶数误差部分的提取是通过使用角度的相位平移和对两组数据的加法和转换实现的。奇数和偶数部分的误差被加在一起,角传感器的总误差就可以被自身测量出来了。通过实施类似于使用计算误差的IV-C会话的ROM补偿,角传感器的精度能够自我修正。
E.角速度和角加速度
角传感器的分辨率增加,使得在侦测速度和加速度信号数据(图12)的过程中利用高分辨率的位置信息成为可能。除此之外,这些信号可以通过一系列通讯电路(图13)传送。该电路有划分信号和ROM补偿;还用240脚的IC和flash芯片的当前位置数据和串行通信。多功能角度传感器如图11所示。
F.双向串行通信
因为角度传感器的复杂通讯所需要的信息量是非常巨大的,而且在并行通讯中多功能和处理成为不可能的事情。因此串行通讯被应用并且使用较少线的双向串行通信得到长远发展。通信协
资料编号:[5582]



