平移机械搬运装置结构设计毕业论文
2021-12-05 17:36:52
论文总字数:14828字
摘 要
本课题研究对象为平移机械搬运装置,根据平移机械搬运装置的要求,需要实现机械臂多自由度的运动,以实现对机械零件的夹取、搬运、卸下。因此需要设计不同结构,不同方向的机械关节,同时依据工程要求,设计不同关节的转速。
本研究采用CAD展示机械臂的装配图,同时辅助PROE三维建模软件便于理解。
该机械结构特色:采用传统的关节型机械臂与平移导轨结合,结构简单安装便捷,且针对不同自由度的结构分开设计,便于后续设计伺服系统。
本研究开发了一种新型的机械臂,对机械臂的设计方案提出了新的思路,对未来机械结构的设计具有重要意义。
关键词: 平移搬运装置;机械结构设计;转速设计;自由度设计
ABSTRACT
According to the requirements of the translational mechanical handling device, the research object of this paper is the translational mechanical handling device. It is necessary to realize the multi-degree-of-freedom motion of the mechanical arm to realize the clamping, handling and unloading of the mechanical parts. Therefore, it is necessary to design mechanical joints with different structures and different directions, and to design the rotational speed of different joints according to the engineering requirements. In this study, CAD was used to display the assembly drawing of the manipulator, and the three-dimensional modeling software PROE was used to facilitate understanding. The Mechanical Structure Features: The traditional joint-type manipulator combined with the Translation Guide Rail, the structure is simple and convenient to install, and designed separately for the structure of different degrees of freedom, easy to follow-up design servo system. In this paper, a new type of mechanical arm is developed, which provides a new idea for the design of the mechanical arm and is of great significance to the design of the mechanical structure in the future.
Key Words: Translation Transport Device; Mechanical Structure Design; rotational speed design; freedom design.
目录
摘要...........................................................1
Abstract.......................................................2
第一章绪论.....................................................4
1.1机械臂的作用及意义..........................................4
1.2机械臂的现状及发展趋势......................................5
1.3机械手臂运动机制............................................5
1.4机械臂设计方向及方法........................................5
1.4.1整体机构需要的自由度及其实现方案......................5
1.4.2各部件的具体尺寸......................................6
1.4.3机械臂的驱动方式......................................6
第二章结构设计..................................................6
2.1传动机构结构设计以及运动分析................................6
2.2各关节传动链设计方案........................................7
2.2.1肩关节传动方案设计....................................7
2.2.2肘关节传动方案设计....................................8
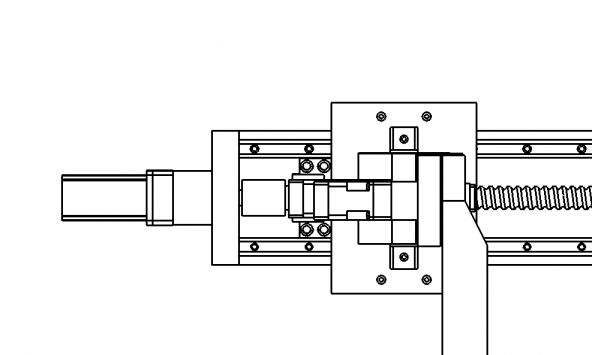
2.2.3平移导轨传动方案设计..................................8
2.3转速,线速度设计,转矩,力矩设计............................9
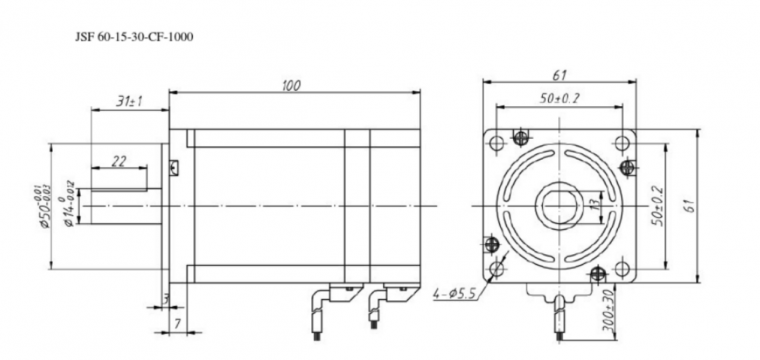
2.4电动机选型..................................................9
2.4.1选择电动机的结构和类型................................9
2.4.2选择电动机的容量......................................10
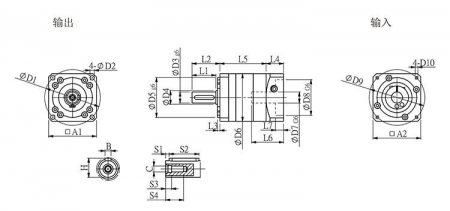
2.5减速机的选型................................................11
2.5.1减速机初步选型........................................11
2.5.2传动比设计方案........................................12
2.5.3传动系统的运动和动力参数计算..........................13
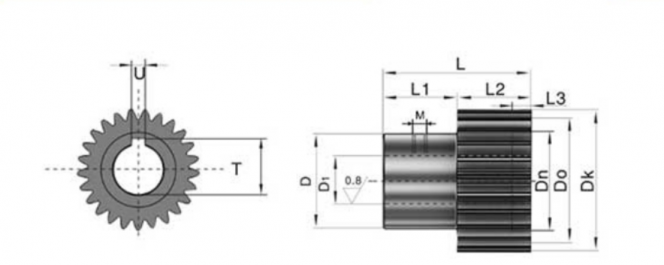
2.6齿轮选型....................................................14
2.7主要轴以及轴承设计..........................................15
2.7.轴承设计 ..............................................15
第三章零部件设计分析............................................16
3.1大臂的结构设计..............................................16
3.2小臂的结构设计..............................................17
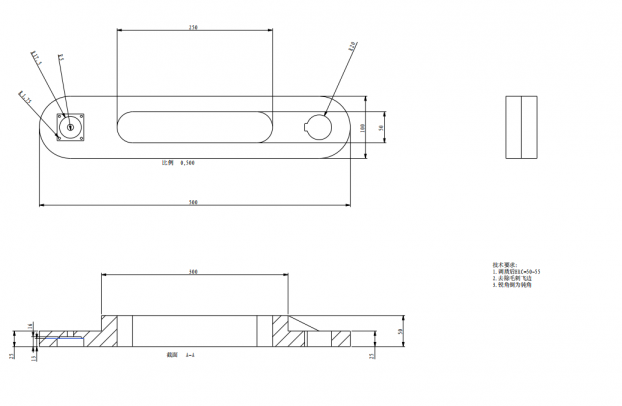
3.3导轨的结构设计..............................................18
3.4底座的结构设计..............................................20
第四章强度校核..................................................21
4.1轴承的强度校核..............................................21
4.2底座的强度校核..............................................22
4.3大臂的强度校核..............................................22
- 参考文献................................................23
- 总结.....................................................24
致谢............................................................26
第一章 绪论
1.1机械臂的作用及意义
近几年来,随着国内机械行业的飞速发展,生产制造水平的不断提升,对生产车间的零部件制造,机电一体化水平有了更高的要求。为了替代人类在某些严峻的环境中从事生产活动,或者流水线生产作业,用机械搬运装置的往复的工作,节约人的体力,提高生产车间工作效率,让车间生产的零部件拥有高精度和统一性,保证机械零件的互换性,同时满足智能化新时代对机械行业提出的统一化,标准化要求。[1]它提高了劳动生产效率,利用平移搬运装置以取代人工劳动。平移搬运装置的研究直接影响到我国机械领域自动化水准的提高,可以满足各生产车间的自动化要求。在经济高速发展的现在,纯粹的手工劳动已经满足不了、繁复,枯燥,危险的机械工作环境,机械手广泛的得到应用。在机械行业中,它可用于零部件的组装,加工工件的搬运,以及用于组合机床切换刀具。
机械手在生产活动中的大量运用,使得人类的生产效率有所提高,同时也改善了车间的生产环境,降低了生产事故,智能化人类生活.。其意义可简单概括如下:
一、提高生产车间的自动化水平。
二、改善劳动环境,避免安全事故。
三、提高生产效率。
1.2机械臂的现状及发展趋势
工业用机械手臂是二十一世纪出现的一种高科技生产设备。机械手臂可以通过编程确定运动轨迹,进行周期性工作。在结构和使用功能上兼具人和机械的优点,属人工智能设备。机械臂工作的准确性和代替人类繁复工作的能力,在未来机械领域有很大的潜力。
机械手是自动化生产过程中出现的一种新型机械设备,其被广泛运用于流水生产线中,现代化的机械手臂已经能达到和人手差不多的灵活度,并且其不知疲倦,能在危险的工作环境进行持续作业,能搬运起明显超越人手的力量,因此,机械手的研发与制造一直是机械行业的热门话题。
目前,机械手朝着智能化,高自由度,专门化,高精度,低重高效的方向发展。回顾机械手的发展历史,最早从德国开始使用机械手从事搬运作业,研制焊接机械结构,其后美国,日本,苏联机械行业如雨后春笋,重视创新科技的发展,得到飞速发展,到了20 世纪90 年代后, 中国不甘落后,也开始了工业机械手的研制,包括自动化机床的立式自动换刀装置和卧式换刀机械手,以及用于搬运工作的高负载铸件搬运机械手。[2]
1.3机械手臂运动机制
不同机械关节单独运动,其中驱动方式多样,有气动,液动,电动,机械传动等,机械臂的类型包括有圆柱式,关节式等等,同时通过伺服系统编辑运动轨迹,多轴联动使机械臂平稳运行,其关键为考虑多轴联动,从而进行具体编程,但伺服系统设计内容不包括在本次研究中。
1.4机械臂设计方向及方法
请支付后下载全文,论文总字数:14828字
相关图片展示: