四轮驱动电动汽车自适应驱动防滑控制的研究毕业论文
2020-02-17 11:09:40
摘 要
驱动防滑控制系统是一种主动安全性控制系统,它的核心作用是通过发挥控制系统的作用来避免汽车滑动状况的出现或者当汽车滑动状况出现后控制系统能立马做出响应使汽车由“滑动”调整到稳定。其主要实现形式是通过控制器控制电动汽车的电机来调节输出力矩的大小,进而改善汽车的滑移率,使其从“危险状态”调整到理想的范围之内,从而能够保证汽车的安全性。因此,本文研究的驱动防滑技术对于保证汽车的安全性具有重大的价值和意义。
本文以四轮驱动轮毂电机电动汽车为研究对象,以电动汽车驱动防滑控制策略为研究目标,通过MATLAB/SIMULINK软件对建立的数学模型进行仿真分析,从而制定合理有效的驱动防滑控制系统。本文的主要研究内容如下:
(1)根据汽车动力学理论知识和对汽车运动状态的分析,搭建各个子系统的数学模型,并结合相关汽车参数搭建与理论数学模型相对应的仿真模型,形成系统仿真平台,为理论结果分析奠定基础。
(2)通过对汽车驱动防滑控制系统的原理和特点进行分析,并对五种控制策略进行了充分的讨论和对比,最后确定了本文拟选用的控制策略,分别是PID控制和模糊控制。
(3)根据选取的控制策略,并基于两大控制方法的特点和组成要素等基础理论,设计了PID控制器和模糊控制器,为驱动防滑控制系统提供了核心组成部分。
(4)通过选取不同路面状况下的实验参数,对PID控制下的系统和模糊控制下的系统进行仿真分析,并结合实际行驶情况进行了多角度、多方面的对比分析,检验了系统的正确性和可靠性。
本文所设计的系统和控制策略,具有结构简单、便捷性强、操作简单、便于控制、易于扩展等特点,在满足驱动防滑控制系统运行的同时,还具有较高的拓展性。总的来说,能够为汽车的驱动防滑控制起到一定的控制效果。
关键词:轮毂电机;驱动防滑;PID控制;模糊控制
Abstract
The driving anti-skid control system is an active safety control system. Its core function is to avoid the appearance of the sliding condition of the car by playing the role of the control system or the control system can immediately respond to the car when the sliding condition of the car occurs. Adjusted to "slid" to stabilize. The main realization form is that the controller controls the electric motor of the electric vehicle to adjust the output torque, thereby improving the slip ratio of the vehicle and adjusting it from the “dangerous state” to the ideal range, thereby ensuring the safety of the automobile. Therefore, the driving anti-skid technology studied in this paper has great value and significance for ensuring the safety of automobiles.
In this paper, the four-wheel drive hub motor electric vehicle is taken as the research object. The electric vehicle anti-skid control strategy is taken as the research goal. The mathematical model established by MATLAB/SIMULINK software is simulated and analyzed, so as to develop a reasonable and effective driving anti-skid control system. The main research contents of this paper are as follows:
(1) According to the theoretical knowledge of automobile dynamics and the analysis of the state of motion of the automobile, build the mathematical model of each subsystem, and combine the relevant automobile parameters to construct the simulation model corresponding to the theoretical mathematical model to form a system simulation platform, which is the theoretical result analysis. Lay the foundation.
(2) Through the analysis of the principle and characteristics of the vehicle-driven anti-skid control system, and the five control strategies are fully discussed and compared, the control strategies to be selected in this paper are determined, namely PID control and fuzzy control.
(3) According to the selected control strategy, based on the basic theories of the characteristics and components of the two control methods, the PID controller and fuzzy controller are designed to provide a core component for driving the anti-skid control system.
(4) By selecting the experimental parameters under different road conditions, the system under PID control and the system under fuzzy control are simulated and analyzed, and the multi-angle and multi-faceted comparative analysis is carried out in combination with the actual driving situation to verify the correctness of the system. Sex and reliability.
The system and control strategy designed in this paper has the characteristics of simple structure, convenient convenience, simple operation, easy control and easy expansion. It also has high expandability while satisfying the operation of the drive anti-skid control system. In general, it can control the driving slip control of the car.
Keywords: Hub motor; Drive anti-skid; PID control; Fuzzy control
目 录
摘 要 I
Abstract II
第1章 绪论 1
1.1 课题背景及研究目的和意义 1
1.2 国内外的研究现状 2
1.2.1 国外研究现状 2
1.2.2 国内研究现状 3
1.3 电动汽车电机驱动系统结构 4
1.3.1 电动汽车电机驱动布置方案 4
1.3.2 四轮独立驱动轮毂电机驱动系统的优势 5
1.3.3 轮毂电机驱动控制的基本原理 6
1.4 本文主要研究的内容 7
第2章 电动汽车驱动模型建立 8
2.1 车辆模型坐标系定义 8
2.2 驱动模型建立 8
2.2.1 整车力学模型 8
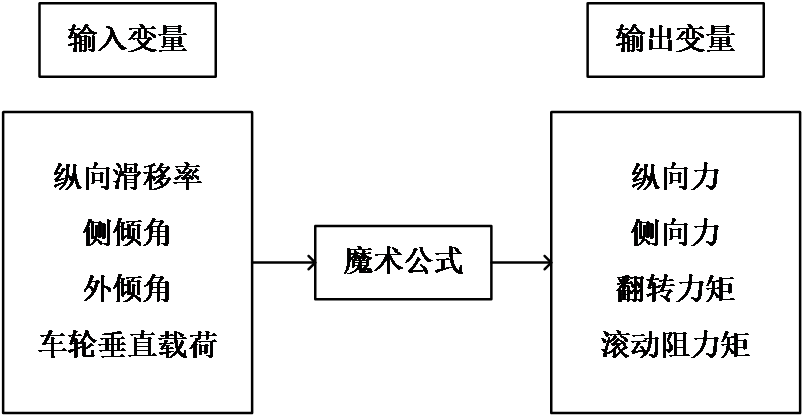
2.2.2 轮胎模型 10
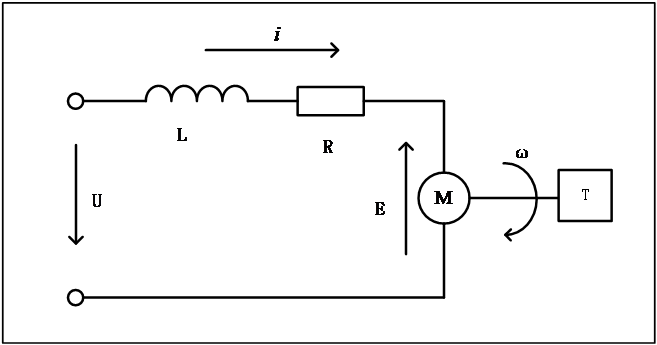
2.2.3 电机模型 13
2.2.4 滑转率计算模型 14
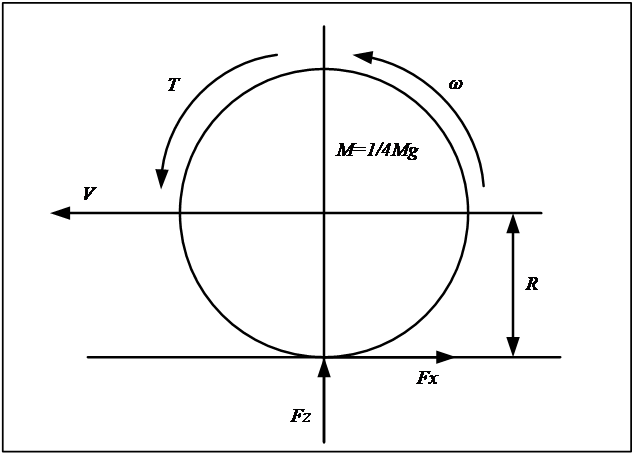
2.2.5 单轮模型 14
2.3 本章小结 16
第3章 电动汽车的驱动防滑控制 17
3.1 电动汽车ASR系统的基本原理 17
3.2 滑转率对汽车稳定性的影响 18
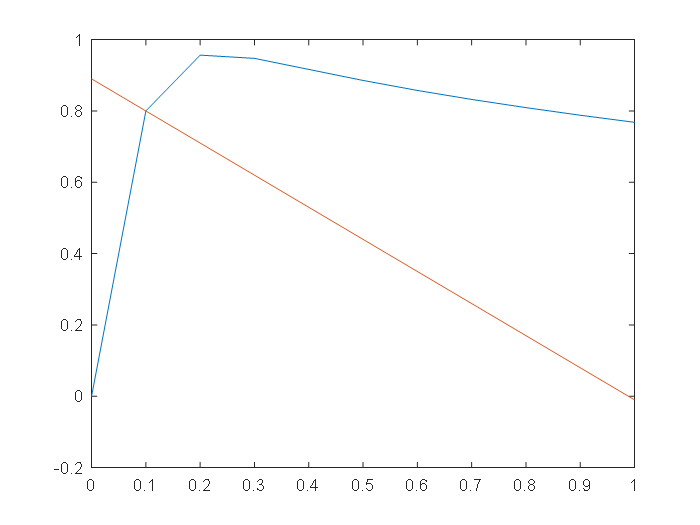
3.3 最优滑移率识别方法 19
3.3.1 Burckhardt 曲线模型 20
3.3.2 Kiencke 曲线模型 21
3.4 驱动防滑控制策略研究 21
3.4.1 逻辑门限值控制 22
3.4.2 PID控制 22
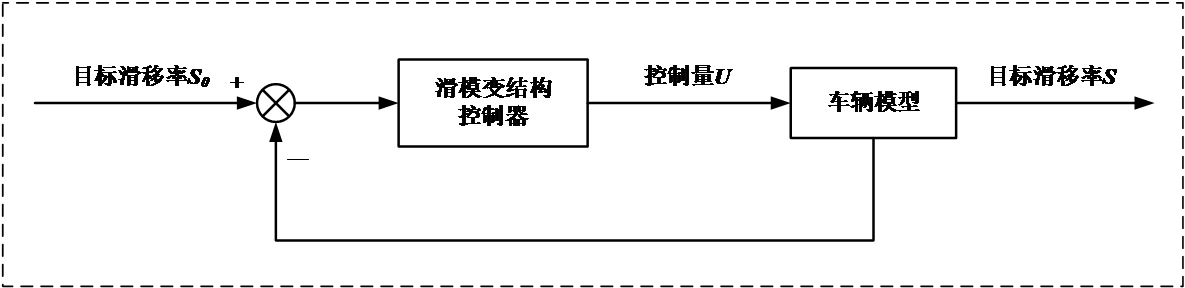
3.4.3 滑模变结构控制 23
3.4.4 最优控制 24
3.4.5 模糊控制 25
3.5 本章小结 26
第4章 驱动防滑系统控制器的设计 27
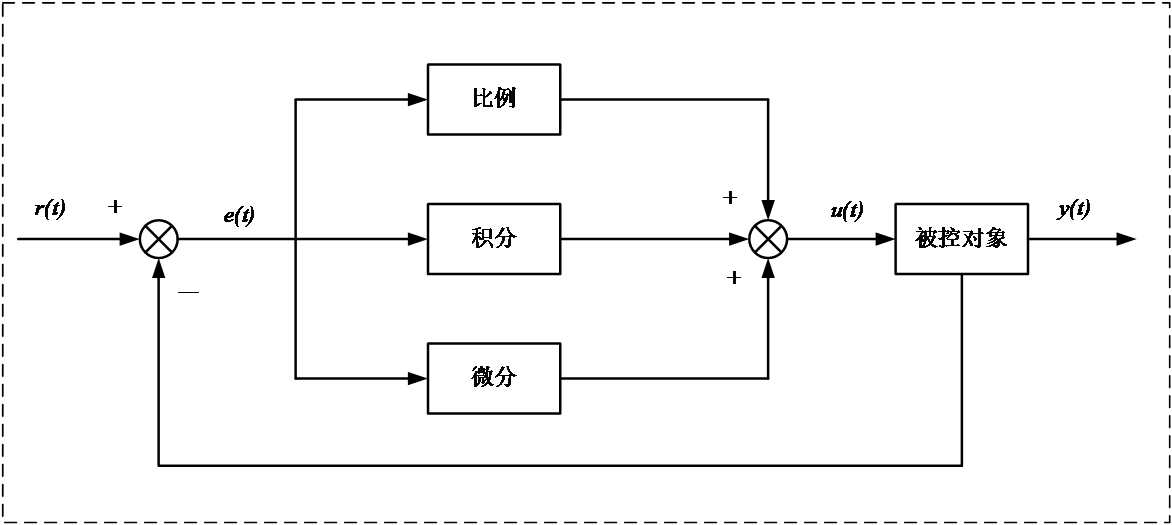
4.1 PID控制器 27
4.1.1 PID基本原理 27
4.1.2 PID控制器的设计 28
4.2 模糊控制器 29
4.2.1 模糊控制基础理论 29
4.2.2 模糊控制器的设计 32
4.3 本章小结 39
第5章 驱动防滑系统仿真及结果分析 40
5.1 Simulink仿真模型的建立 40
5.1.1 单轮仿真模型 40
5.1.2 轮胎仿真模型 41
5.1.3 电机仿真模型 42
5.1.4 滑移率计算仿真模型 42
5.1.5 ASR系统仿真模型 43
5.2 仿真结果与分析 44
5.2.1 PID控制下的结果分析 44
5.2.2 模糊控制下的结果分析 45
5.2.3 PID控制与模糊控制的对比分析 47
5.3 本章小结 47
第6章 总结与展望 48
6.1 总结 48
6.2 展望 48
参考文献 50
致 谢 52
第1章 绪论
1.1 课题背景及研究目的和意义
随着我国汽车行业以及汽车开发技术的迅猛发展,国内汽车市场的扩大也越来越迅速(尤其是传统汽车行业),这也伴随着人均汽车的保有量呈现出不断上升的趋势,由此带来的环境污染以及能源短缺这“两大难题”日益成为各国政府的“烫手山芋”。为了应对这越来越严重,越来越影响到人们日益生活、国家绿色发展的“两大难题”,全球各个国家纷纷采取措施来降低传统燃油汽车的污染排放,同时也不断鼓励更多的汽车厂商能够研发出“绿色汽车”。此时,电动汽车的发展也必然成为了时代所趋,并为解决这一突出问题提供了方案,并成为国内外科研工作者研究的重要课题之一。近年来,国内外的新能源汽车销售市场日益火爆,新能源汽车的销量逐年攀升。据中国汽车工业协会统计,纯电力汽车和油电混合的动力汽车在今年的前三个季度有着较大的上升趋势,尤其是中、美、欧等五大核心市场的电动汽车上牌量突破150万辆,相比去年的同期增长率达到了48.2%,相比较去年的同比增长率足足增加了12 %,其中,纯电力汽车特别受到市场的追捧,它的新上牌量相比去年的同期增长率达到了惊人的77%[1]。据有关部门预计,2019年的电动汽车市场将会有非常大的前景,电动汽车的销售量也将会猛升。
随着电动汽车越来越普及,其核心技术的发展也越来越迅速,人们对电动汽车各方面的性能要求也随着市场导向越来越高。比如一些已经应用在传统燃油汽车上的较为成熟的主动安全技术,包括防抱死制动系统 ABS、电子稳定性系统 ESP和驱动防滑控制系统ASR等都被广泛移植到电动汽车上。目前,市场上的电动汽车普遍都采用的是四轮驱动,对于四轮驱动电动汽车而言,有单电机驱动、双电机驱动、也有轮毂电机驱动等。不同形式的驱动方式,使得驱动控制系统有所不同,电动汽车的电机具有布置灵活、结构简单、响应快、易于控制的特点,由此在对电动汽车相关的控制策略和方法制定时,受到的局限性将是比较小的,且比较容易实现复杂的控制算法,其控制效果也会更加理想。电动汽车驱动防滑控制系统是汽车制动防抱死系统应用上的拓展,它的目的是为了将汽车的滑移率控制在当前路面的最优滑移率范围内,当汽车不发生滑转的前提下,确保汽车具有较好的操纵稳定性,此外还要确保汽车具有一定的动力性。传统汽车的驱动防滑控制系统,通常情况下是通过减少节气门的开度来降低发动机功率或控制驱动轮的制动转矩以防止车辆在起步加速过程中驱动轮的过度滑转。
电动汽车驱动防滑控制系统最主要的目的是能够防止汽车在不同路况下行驶时发生驱动轮过度滑转,使汽车能够快速且稳定的起步。它的基本原理是:当汽车轮胎出现打滑现象时,能够通过控制系统的控制将汽车滑转率很好地控制在当前路面的最优滑转率范围内,这一过程的实现主要是改变汽车输出转矩,并借助车轮和路面之间的附着力来提高车辆行驶稳定性。结合目前电动汽车的发展前景以及提高电动车主动安全性的必要性,本文拟针对四轮驱动的轮毂电机电动汽车驱动防滑控制的研究,具有一定的科研价值和实际的应用价值,对车辆行驶的稳定性、经济性、动力性的优化和改善以及电动汽车行业的进一步发展都具有重大的意义。
1.2 国内外的研究现状
由于传统燃油汽车的主动安全技术已经比较成熟以及性能也相对优良,且控制策略和控制方法也相对比较多样化和多元化。而这些安全技术在如若应用在电动汽车上,其整体的设计思路、控制策略和方法在很多方面是完全不同于传统燃油汽车的,尤其对于驱动防滑控制系统来说变化较大,因为其驱动形式由发动机驱动变为电机驱动。所以,我们需要依托已经比较成熟的燃油汽车上的控制策略和方法,并且在其基础上进一步的改进和完善,充分参考既有的方式和方法,借鉴前人积累下来的经验,深入分析既有策略的优点和缺点,不断弥补其中的不足之处,设计研究出控制效果好、成本低、有广泛应用价值的电动汽车驱动防滑控制技术。
关于该控制技术的研究,由于美、日、欧这些工业较为发达的国家在电动汽车、汽车电控系统及车辆控制策略等方面的研究起步较早,研究投资较大,其科研成果较为突出,且在全球范围内有较大的优势。目前为止,包括电动汽车驱动防滑控制技术在内的各项主动安全技术依旧掌握在美、日、欧这些发达国家手中,在这些发达国家中,日本的发展更是在第一梯队中处于领先地位,其在电动汽车驱动防滑控制技术的研究方面始终处在世界领先水平,然而我国在这方面的研究依旧处在初级阶段。
1.2.1 国外研究现状
早在上世纪中叶,国外就已经开始着手关于电动汽车相关技术方面的研究,而国内主要是在本世纪才开始研究,这使得国外的技术明显优于国内。目前,各国纷相开始加大对电动汽车技术研究与开发的力度,不仅在政策上支持,更是对其生产基地、资金方面提供支持。此外,各大汽车企业和厂商、研究型机构、相关高等院校也争相加入电动汽车研究的行列,例如美国的通用公司、日本的丰田公司、美国的福特公司、德国的戴姆勒公司、日本东京大学以及日本东京农工大学等等,各国竞相加大研究力度,势必为了在市场中争夺话语权。
其中,日本东京大学的Yoichi Hori 和Shin-ichiro Sakai 等提出了一种四轮驱动电动汽车防侧滑的方法[2][3][4]。该方法实现的第一步是需要检测驱动电机的转速和电流这两个参数,基于这两个参数可以得到车轮的滑转情况,然后通过判断模块启动控制系统来控制电机调节出适合的输出转矩,使滑转的汽车正常行驶。日本东京大学的Yoichi Hori和贺鹏等提出了一种基于电动汽车稳定性的综合控制方法[5]。该方法是通过“前馈协调控制”和“反馈协调控制”这两个自由度来得到满足电动汽车在横向运动时所需的控制量,他们采用的方法叫做“过自由度控制法”,通过这个控制方法来合理调节各个电机所需的转矩。日本东京农工大学的Abe和Mokhiamar等提出了一种基于横摆力矩的控制方法[6]。该方法是根据各个车轮的横向力、纵向力与垂直力三者之间的比值,通过选取不同的权重比系数对每个车轮进行单独控制,从而每个车轮的横向力和纵向力能够得到优化,并得到重新分配。
以上是毕业论文大纲或资料介绍,该课题完整毕业论文、开题报告、任务书、程序设计、图纸设计等资料请添加微信获取,微信号:bysjorg。
相关图片展示: