小型电动叉装车动力系统匹配研究毕业论文
2020-02-17 10:56:49
摘 要
伴随国内经济建设的飞速发展,道路交通、水利水电、城市建设等基础设施的建设规模也越来越大,对伸缩臂叉装车的需求量也随之上涨。
本课题就目前国内叉车市场对于高的举升距离、大的卸货距离及一机多用的小型工程机械日渐迫切的需求,而进行的产品设计研发项目。考虑到伸缩臂叉装车必须达到额定的载荷、较大的变幅角度、作业幅度、各种严峻复杂的工作环境以及伸缩臂叉装车强制满足的安全性能,需要在设计中对伸缩臂叉装车的关键装置进行严谨的设计计算以满足产品的使用性能。
论文主要内容如下:
- 简要介绍了伸缩臂叉装车的国内外发展现状、发展前景及主要用途,同时对臂架结构进行了数学原理说明,为设计伸缩臂叉装车的变幅、随动液压缸做铺垫。
- 确定伸缩臂变幅系统的方案。基于已知数据,对伸缩臂变幅油缸的活塞杆行程、导向长度、缸筒及活塞杆内外径等进行设计计算,并进行了起升电机的参数匹配。
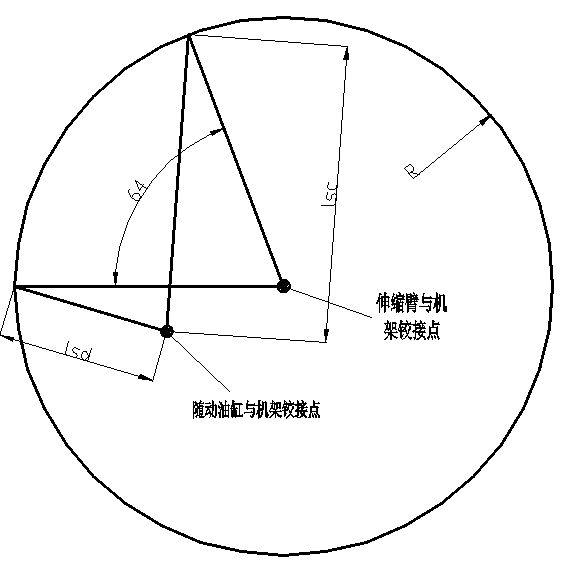
- 根据已知数据及所选货叉平动方案,对随动油缸的三铰点进行设计计算,并运用mathcad软件进行校核验算。
- 变幅液压缸和随动液压缸的设计计算主要参照《起重机设计手册》和《机械设计手册》中的公式及表格。
- 运用CATIA实现变幅液压缸的三维建模、虚拟装配和干涉校验,并运用CAD将三维模型转换为二维图纸。
关键词:伸缩臂叉装车;变幅油缸;参数匹配;随动油缸;铰点布置
ABSTRACT
With the rapid development of domestic economic construction, the construction scale of road traffic, water conservancy, hydropower, urban construction and other infrastructure is also growing, and the demand for telescopic forklift trucks is also rising.
This topic is about the product design and development project of forklift truck market, which is in urgent need of high lifting distance, large unloading distance and multi-purpose loading machinery. Considering that the telescopic forklift truck must meet the rated load, large amplitude angle, operating range, various severe and complex working environment and the mandatory safety performance of the telescopic forklift truck, It is necessary to design and calculate rigorously the key devices of telescopic forklift truck in order to meet the service performance of the product.
The main contents of this paper are as follows:
- The development status, development prospects and main uses of telescopic forklift trucks at home and abroad are briefly introduced. At the same time, the mathematical principle of the boom structure is explained, which paves the way for the design of the luffing hydraulic cylinder and the servo hydraulic cylinder of telescopic forklift trucks.
- Determine the scheme of telescopic boom variable-amplitude system. Based on the known data, the working stroke, guiding length, inner and outer diameters of cylinder barrel and piston rod of telescopic boom luffing cylinder are designed and calculated.
- According to the known data and the translational scheme of the selected working device, the three hinge points of the servo cylinder are designed and calculated, and checked by Mathcad software.
- The design and calculation of luffing hydraulic cylinder and servo hydraulic cylinder mainly refer to the formulas and tables in Crane Design Manual and Mechanical Design Manual.
- Using CATIA to realize the three-dimensional modeling, virtual assembly and interference checking of variable amplitude hydraulic cylinder, and using CAD to transform the three-dimensional model into two-dimensional drawings.
Key words: telescopic forklift truck; luffing cylinder; parameter matching;servo cylinder; hinge point layout
目 录
第1章 绪 论 1
1.1伸缩臂叉装车简介 1
1.1.1伸缩臂叉装车 1
1.1.2伸缩臂叉装车国内外相关标准 2
1.2国内外伸缩臂叉装车发展简介 2
1.2.1国外伸缩臂叉装车发展简介 2
1.2.2国内伸缩臂叉装车发展简介 3
1.3课题研究内容 3
第2章 分析与设计 4
2.1伸缩臂叉装车的总体设计 4
2.1.1 设计参数 4
2.1.2伸缩臂叉装车电控系统 4
2.1.3伸缩臂叉装车作业液压系统 5
2.1.4整机尺寸及布局 6
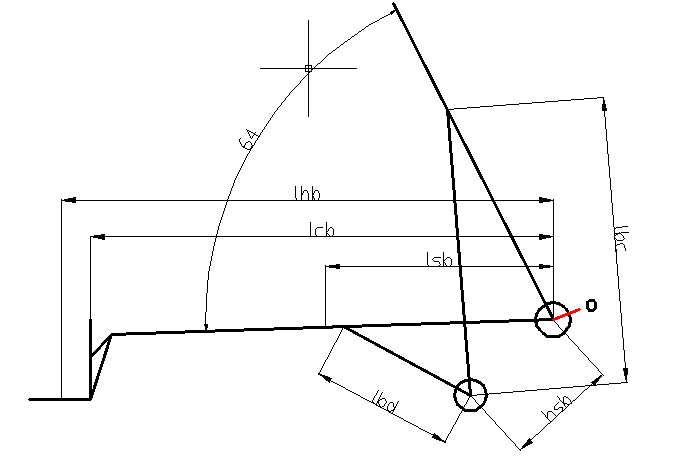
2.1.5作业高度及其幅度计算 6
2.2本章小结 7
第3章 伸缩臂叉装车变幅油缸设计 8
3.1三铰点的运动和受力要求 8
3.2变幅油缸的设计计算 9
3.2.1变幅油缸的设计要求 9
3.2.2变幅油缸行程的确定 10
3.2.3变幅油缸力的确定 10
3.2.4变幅油缸缸筒设计 11
3.2.5变幅油缸活塞杆的设计 13
3.2.6变幅油缸起升和下降时间 15
3.2.7活塞的设计 16
3.2.8缓冲装置的设计 17
3.3起升电机的参数匹配 18
3.3.1起升油泵的参数匹配 18
3.3.2起升电机的参数匹配 18
3.4本章小结 20
第4章 伸缩臂叉装车随动油缸设计 21
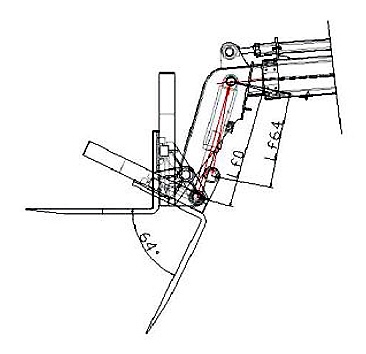
4.1货叉平动机构设计 21
4.2随动油缸及其铰点的设计计算 22
4.2.1随动油缸的缸径杆径 23
4.2.2随动油缸行程与铰接点的确定 24
4.2.3随动油缸校核 32
4.3本章小结 33
第5章 结论及展望 34
5.1结论 34
5.2展望 34
参考文献 35
致 谢 36
第1章 绪 论
1.1伸缩臂叉装车简介
1.1.1伸缩臂叉装车
伸缩臂叉装车是一种具有越野性能的带伸缩臂的多功能叉车。1981年,由法国Manitou公司推向市场。
伸缩臂叉装车不但具有传统叉车搬运物料的能力,还具有臂架式起重机的功能,可以更换多种不同的作业属具,有崎岖环境作业的能力。伸缩臂叉装车具有可伸缩的臂架式工作装置,属于半自动作业机械。它集装载机械、传统叉车、高空作业平台、小型起重器械甚至农用拖拉机的功能与一体,是一种多功能搬运及举升设备,是现在建筑行业、农牧业、港口工厂等行业较为理想的多功能搬运装卸机具[1]。
伸缩臂叉装车按结构形式可分为回转式和非回转式,伸缩臂架时伸缩臂叉装车的核心,按照伸缩臂架布置方式的不同,可分为伸缩臂前置、伸缩臂中置以及伸缩臂侧置。本文主要阐述非回转式伸缩臂中置叉装车。
伸缩臂叉装车具有突出的优点,主要用在工矿企业仓库、建筑工地及其他工地上运输、起升、堆垛。伸缩臂叉装车能够利用多种工作属具,有效完成不同的作业,伸缩臂叉装车的主要特点有[2]:
1.多用性
伸缩臂叉装车具有广泛的用途,效率高。面对不同的工作要求,有一系列可快速更换的工作属具供选择,包括铲斗、货叉、立式门架等,无需购买其他的机型,只需要在机具上增加几个附件,就可以提升伸缩臂叉装车的生产能力及工作效率。
2.灵活性
伸缩臂叉装车采用四轮驱动型式,包括三种转向模式:四轮转向、前轮转向、斜行行走,双速齿轮变速箱,故转弯半径较小,能在狭小空间中灵活快速作业。
3.安全稳定性
伸缩臂叉装车轴距长、重心低、车架的前部可以安装稳定支架,且臂架具有伸出、降低自动锁定的功能、电动机置于车架纵向中心,使其在崎岖地带可以保持稳定;重量分布均匀,且四轮驱动改善了在泥泞地、岩土地带及雪地上的机动性;视野也较传统叉车开阔。
1.1.2伸缩臂叉装车国内外相关标准
国内标准为《伸缩臂叉装车规范(GJB4555-2003)》,其在2003年12月3日由中国人民解放军总后勤部公布。该标准规定了伸缩臂叉装车的要求,适用于OCS2002-3伸缩臂叉装车。其一共分为六个部分----范围、要求、引用文件、质量保证规定、交货准备和说明事项。要求主要囊括:基本参数、产品质量及技术要求、动力性能、稳定性、作业安全性、行驶可靠性、噪音等。质量保证规定主要囊括:检验分类、基本参数测验、产品质检、动力性能测试、试验载荷等。
在国外,美国的伸缩臂叉装车标准为《Rough Terrain Fork Lifts(ANSI B 56.6)》;澳大利亚的标准为AS1418-19for Telehandlers;欧洲标准为《Safety of industrial trucks--Self-proprlled variable reachtrucks(EN1459)》。
1.2国内外伸缩臂叉装车发展简介
1.2.1国外伸缩臂叉装车发展简介
伸缩臂叉装车在西方发达国家经过长期的发展,生产配套体系完善、技术水平全球领先,并且拥有成熟的市场。由于欧美澳等国家农牧业的发展而产生了对伸缩臂叉装车的需求,即使用群体的自然存在促使了其产品化;而产品多行业广领域的使用,又进一步扩宽了应用范围,刺激伸缩臂叉装车向更高层次发展。
伸缩臂叉装车的发展受限于基础元器件的水平,内燃机、电动机、传动装置及液压元件等均为外购进口产品。所以伸缩臂叉装车的产品性能、质量和价格等因素,不仅仅取决于主机厂的设计生产水平,更取决于基础工业的发展水平。欧美国家经过两次工业革命,基础工业水平相对领先,为伸缩臂叉装车的高精尖技术发展提供了基础[3]。
国外伸缩臂叉装车的用户增长速度非常迅速,美国的伸缩臂叉装车市场以每年25%的速度在增长。在欧洲,伸缩臂叉装车在2004年市场改革之后发展良好,2005年销售量显著提高。曾经预测其销售量最多达到年2.1万台,但2006年的市场需求量超过2.6万台。
1.2.2国内伸缩臂叉装车发展简介
近年来工程机械行业的发展在我国的到重视,尤其是工用及农用机械产品的产需水平不断提高。但作为一种小型工程机械的伸缩臂叉装车在我国发展仍然非常缓慢,国内市场甚至还基本处于空白状态。
市场需求是决定行业发展的关键因素。世界各国乃至亚洲各国对中国的伸缩臂叉装车都持不认可态度,造成这种负面影响的主要原因为:中国伸缩臂叉装车市场环境还需进一步改善,才能匹配中国伸缩臂叉装车的生存现状。中国的伸缩臂叉装车作为一种小型的工程机械,价格相对昂贵,而国内的叉装车市场消费能力有限,虽然也有一些企业看好中国伸缩臂叉装车的庞大市场,但是都不愿意成为第一批开拓中国市场的试验者,从而导致中国伸缩臂叉装车行业整体市场开拓力度不够、无法与国外接轨的现状。
中国伸缩臂叉装车制造史要追溯到1989年,是由厦门嘉丰机械厂与同济大学联合设计生产出第一台伸缩臂叉装车。中国伸缩臂叉装车起步相对较晚,但是经过十几年的发展,技术也有了长足的进步。国内不少于八家公司已经制造出伸缩臂叉装车或者正在进军该市场。2007年亚洲工程机械CONEXPO博览会上,湖南山河智能有限公司展示出的三节伸缩臂叉装车,代表了国内的高尖水平。现在主要的生产厂家有湖南山河智能、山东滨州胜利特种叉车制造厂、厦门夏嘉、夏虎和三家乐等公司[4]。
1.3课题研究内容
通过对国内外市场现状的研究了解,研发设计高性能的伸缩臂叉装车对于满足国内的需求是当务之急。为此,本文通过分析现有的高举升、大卸距的装在机械的特定性能的需求,并结合汽车起重机和伸缩臂叉装车技术,对伸缩臂叉装车关键部件进行研究设计。
第2章 分析与设计
2.1伸缩臂叉装车的总体设计
2.1.1 设计参数
最大承受有效载荷(N):30000
水平位外伸最大有效载荷(N):12500
最大举升高度(mm):6500
水平位最大外伸长度(mm):3500
整车重量(kg):8200
传动方式:液力机械传动
驱动模式:四轮驱动
节臂数量:2
整车长度(mm):5050
整车宽度(mm):2270
整车高度(mm):2420
轴距(mm):2850
轮距(mm):1860
最小离地间隙(mm):430
最大行驶速度(km/h):32
发动机额定功率(kW):74
货叉反转角度(°):118
向上/向下变幅时间(s):7.1/4.1
伸出/回缩时间(s):8.1/5.1
转弯半径(轮胎外侧)(mm):3960
2.1.2伸缩臂叉装车电控系统
仅说明安全部分的电控系统,安全部分主要为了满足安全指标。
(1)可以采用3B6公司的控制器及其力矩限制器的力矩控制系统。伸缩臂叉装车在负载产生的倾翻力矩破坏叉车纵向稳定性时,力矩限制系统会以声音以及警示信号向操作人员发出警示。当倾翻力矩达到设定的极限值时,系统可以中断操作(例如组织臂架伸出或降低),防止纵向稳定性继续恶化,这时只有将伸缩臂举升或者回缩,才能解除液压锁定[5]。
(2)可在主臂架上安装限位开关,当伸缩臂最大长度伸长时,限位开关动作,停止伸缩臂继续伸长。
(3)当伸缩臂举升变幅达58°时,接近开关会自动断开变幅油缸的电磁阀,停止举升动作,保持臂架稳定性,达到安全作业目的。
(4)当举升变幅达到30°时,电磁阀使后桥油缸动作,使后桥处于支撑状态,即后桥锁死不能晃动,增强作业的稳定性。车辆行驶时后桥处于浮动状态。
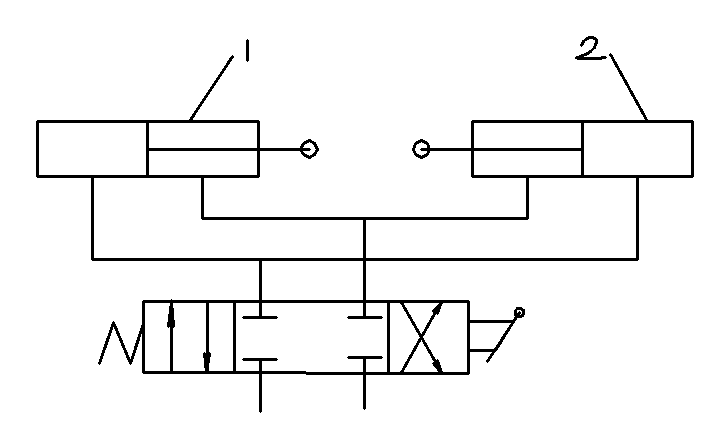
2.1.3伸缩臂叉装车作业液压系统
伸缩臂叉装车的作业液压系统主要组成有:油缸、阀、齿轮泵、管路等,用于实现伸缩臂叉装车的搬运、吊运、堆垛等作业。
以上是毕业论文大纲或资料介绍,该课题完整毕业论文、开题报告、任务书、程序设计、图纸设计等资料请添加微信获取,微信号:bysjorg。
相关图片展示: