MQ4035门座式起重机变幅和旋转机构控制线路设计毕业论文
2020-02-13 22:18:34
摘 要
随着科技的发展,港口吞吐量以及装卸效率等各方面的需求也日益提高,这就意味着门座起重机的控制系统设计也同时更加地偏向大型化和复杂化方向。为了达到预期的目的本文利用PLC和变频调速技术实现门座起重机控制系统的设计。本文主要研究内容如下:
- 介绍门座起重机控制系统的国内外研究现状,并主要针对PLC和变频调速技术展开分析。
(2)概述MQ4035门座起重机的四大机构,并简要的论述门座起重机的运行原理。
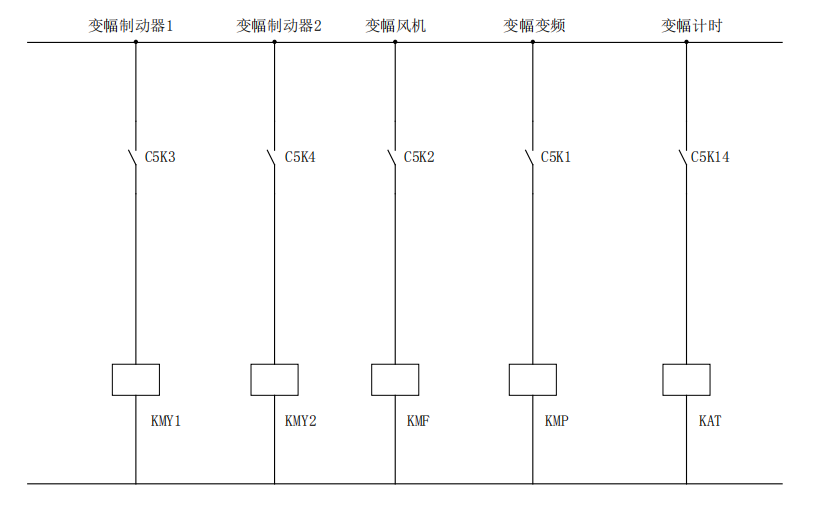
(3)对门座起重机的控制系统进行分析与设计。围绕电源以及变幅机构和旋转机构展开介绍,并结合控制电路图对整个控制系统的运行进行论述。最后根据输入输出点对PLC进行选型,确定设计的I/O表。
(4)根据变幅机构和旋转机构要实现的功能进行PLC程序设计,以实现门座起重机的平稳运行和高效作业。最后从经济性和环保性两方面进行可行性分析。
关键词:门座起重机;电气控制;PLC;变频调速技术
Abstract
With the development of science and technology, the demand for port throughput and loading and unloading efficiency is also increasing. This means that the design of the control system of the portal crane is also more oriented towards large-scale and complicated.In order to achieve the intended purpose, this paper uses PLC and variable frequency speed control technology to realize the design of the door crane control system.The main research contents of this paper are as follows:
- The domestic and international research status of the portal crane control system is introduced, and the analysis is mainly carried out for PLC and variable frequency speed control technology.
- The four major mechanisms of the MQ4035 portal crane are outlined, and the operating principle of the portal crane is briefly discussed.
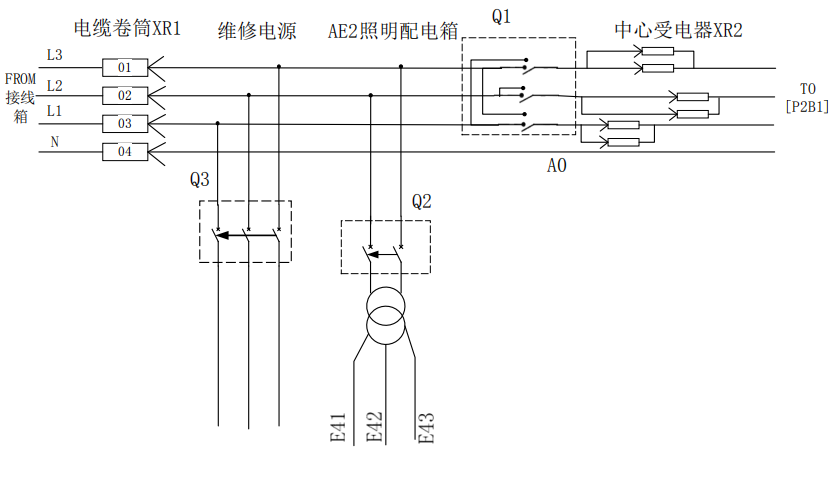
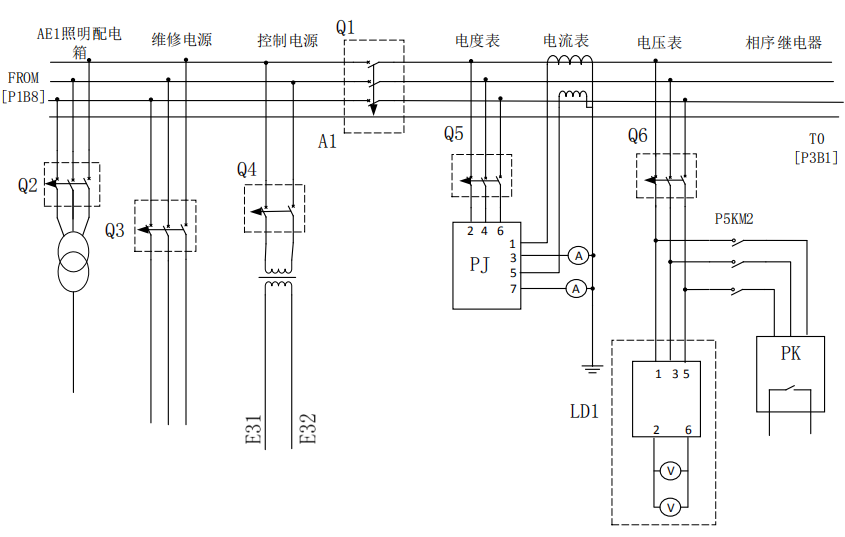
- Analyze and design the control system of the portal crane. The power supply and the luffing mechanism and the rotating mechanism are introduced, and the operation of the whole control system is discussed in combination with the control circuit diagram. Finally, the PLC is selected according to the input and output points to determine the designed I/O table.
- According to the functions to be realized by the luffing mechanism and the rotating mechanism, the PLC program is designed, and the operation of the whole program is introduced according to the various procedures. Finally, the feasibility analysis is carried out from two aspects of economy and environmental protection.
Keywords: portal crane;electrical control;PLC;frequency control technology
目录
第1章 绪论 1
1.1研究目的及意义 1
1.2国内外研究现状 1
1.2.1起重机研究现状 1
1.2.2 PLC系统研究现状 2
1.2.3变频调速系统研究现状 2
1.3本文主要研究内容 3
第2章 门座起重机简介 5
2.1概述 5
2.2门座起重机组成 5
2.2.1变幅机构 5
2.2.2旋转机构 6
2.2.3起升机构 7
2.2.4行走机构 7
2.3门座起重机工作原理 8
2.4本章小结 8
第3章 控制系统分析与设计 9
3.1控制系统总体结构 9
3.2电源部分 9
3.3变幅机构 12
3.3.1电机驱动 12
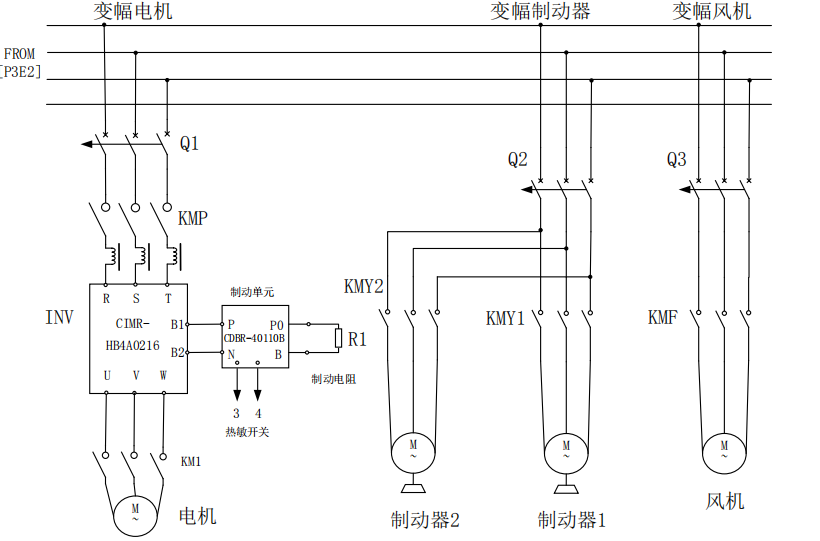
3.3.2变幅机构主回路 12
3.3.3变幅机构控制回路 13
3.3.4变频调速 14
3.3.5保护装置 18
3.4旋转机构 18
3.4.1电机驱动 18
3.4.2旋转机构主回路 18
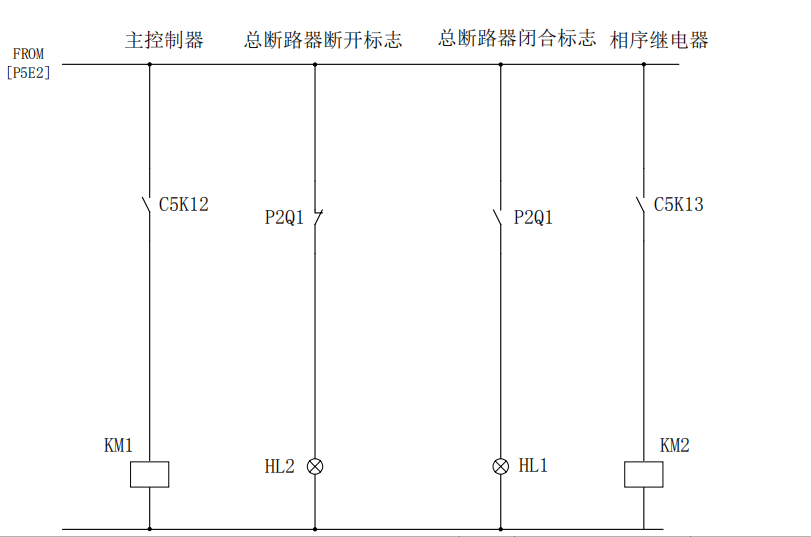
3.4.3旋转机构控制回路 20
3.4.4保护装置 21
3.5 PLC设计与选型 21
3.5.1 PLC简介 21
3.5.2 PLC结构 21
3.5.3 PLC特点 22
3.5.4 PLC选型 23
3.5.5 I/O点数设计 24
3.6本章小结 27
第4章 PLC程序设计 28
4.1变幅机构梯形图 28
4.2旋转机构梯形图 31
4.3可行性分析 33
4.3.1经济性分析 33
4.3.2环保性分析 34
4.4本章小结 34
第5章 总结与展望 35
5.1本文工作总结 35
5.2未来工作展望 35
参考文献 36
附录 37
致谢 48
第1章 绪论
1.1研究目的及意义
随着科技的进步,我国生产的工业化程度日益提高,工业生产的规模的扩大,随之带来的就是各种物资的流通与运输等更加地频繁。这也就同时加快了港口等的发展进程,这也就意味着要提升港口吞吐量。要达到增加港口吞吐量的目的也就意味着对港口中各类装卸设备的要求的提升,也就是在提升作业效率的同时逐步发展的更加大型化、自动智能化,提升作业的流畅程序 。
。
在当今社会的发展中,起重机应用领域越来越广,例如港口机械、交通运输以及自动化等领域,它已经俨然成为了机械化、自动化等中不可或缺的一份子。
本设计的研究对象为MQ4035门座式起重机,它属于港口码头前沿使用的起重机的种类之一。门座起重机的设计也随着港口吞吐量的增加而日益复杂,更加平稳可靠。因此,我们就面临着以下问题:怎样精确的对起重机进行控制并且提高其工作效率,怎样实现四大机构的协作运行。这些问题解决的前提就是起重机配备有一个较高性能的控制系统。
为了提高运行性能,变频调速技术和可编程控制技术在起重机的控制系统中扮演着越来越重要的角色。PLC系统具有灵活性高,通用可靠性高等特点,并且对故障的相应速度快、抗干扰能力强,性价比高、编程简单,应用较广,同时也能够与上位机等进行快速且稳定的通讯。
本课题针对MQ4035门座起重机进行变幅及旋转机构电控系统设计,将PLC技术运用于门座起重机的旋转机构和变幅机构,实现相应的控制,使运行过程更为流程通顺。同时,为了使门座起重机的运行更加的平稳和安全,提高其运行速度,采用变频器以及转子串阻方式来对各模块进行相应的调速,满足设计需求。
1.2国内外研究现状
1.2.1起重机研究现状
港口码头上装卸设备之一:起重机,在经济迅速发展的背景下如今正朝着高效化、大型化等方面不断进步。在国外门座式起重机的众多生产商中,最著名的为欧美的利勃海尔、特雷克斯和日本的神钢等 。他们这些生产商所生产的起重机型号跟其他相比较为完善,在市场上销量较高,主要是因为这些厂商均采取了相应的措施来保证其设备的运行平稳性。正如苟钦博士在《门式起重机发展现状及趋势分析》中指出的其大型设备配置的全球定位系统
。他们这些生产商所生产的起重机型号跟其他相比较为完善,在市场上销量较高,主要是因为这些厂商均采取了相应的措施来保证其设备的运行平稳性。正如苟钦博士在《门式起重机发展现状及趋势分析》中指出的其大型设备配置的全球定位系统 ,方便在设备工作的时候更为准确和及时的了解到他们的工作状况,拓宽了设备的使用范围。欧美的众多国家也着重于对设计技术的探讨,例如其中一些国家成立的“设计委员会”,融经济学、工程学等为一体,确保了生产产品样式新颖并且有安全保证
,方便在设备工作的时候更为准确和及时的了解到他们的工作状况,拓宽了设备的使用范围。欧美的众多国家也着重于对设计技术的探讨,例如其中一些国家成立的“设计委员会”,融经济学、工程学等为一体,确保了生产产品样式新颖并且有安全保证 。
。
反观国内,起重机领域发展进程则较为缓慢。从最开始的学习国外起重机制造大国,到近代的慢慢能够逐步走向自主设计、自主创新,在起重机等工程机械的领域也可以说是取得了质的飞跃。但是由于发展不够成熟,该领域仍然存在或多或少的问题,比如自主研究的水平不够成熟,很多东西还是只能照搬照抄,投入较少。刘长根团队在《门座起重机》书中指出,传统的起重机具有以下几种驱动方案 :直接驱动;改变电机的极对数;转子串阻;涡流制动器调速;可控硅串调速以及直流调速。以上涉及的传动方案均不适合在高速情况下运行,主要是由于它们调速范围有限,不能很好的实现调速功能,因此起重机的各个机构会受到较大的冲击,导致故障较多,寿命减短。另一方面,当采用串阻方式实现调速时,虽然它的调速效果可以得到较好的改善,但是控制电路较为复杂,对能量的损耗也相应较大,在长时间的使用下,很难定位到低速状态,对电机造成较大冲击。因此随着时间推移,这些传统的控制方法都在逐步的被新的技术所代替。
:直接驱动;改变电机的极对数;转子串阻;涡流制动器调速;可控硅串调速以及直流调速。以上涉及的传动方案均不适合在高速情况下运行,主要是由于它们调速范围有限,不能很好的实现调速功能,因此起重机的各个机构会受到较大的冲击,导致故障较多,寿命减短。另一方面,当采用串阻方式实现调速时,虽然它的调速效果可以得到较好的改善,但是控制电路较为复杂,对能量的损耗也相应较大,在长时间的使用下,很难定位到低速状态,对电机造成较大冲击。因此随着时间推移,这些传统的控制方法都在逐步的被新的技术所代替。
1.2.2 PLC系统研究现状
PLC系统是我们最初接触认识到的控制系统。对于传统控制系统而言,主要采用继电器实现控制,这也就导致其具有成本高、可靠性低难维修等缺点。而邓星钟团体在《机电传动控制》书中指出现有PLC控制系统可取代传统的接触器控制 ,提高整个系统的简便性,并且用PLC系统中的相应的模块实现代替。同时,由于原有控制系统很难操作,出了故障很难较快的处理,使用PLC后,故障处理响应时间缩短,系统运行流程性也随之得到改善与增强。因此PLC在起重机行业内所占比重越来越大。例如在本设计中,门座起重机变幅机构和旋转机构的逻辑控制正是采用了PLC技术,不仅可实现预期功能,还可以提升运行平稳性。
,提高整个系统的简便性,并且用PLC系统中的相应的模块实现代替。同时,由于原有控制系统很难操作,出了故障很难较快的处理,使用PLC后,故障处理响应时间缩短,系统运行流程性也随之得到改善与增强。因此PLC在起重机行业内所占比重越来越大。例如在本设计中,门座起重机变幅机构和旋转机构的逻辑控制正是采用了PLC技术,不仅可实现预期功能,还可以提升运行平稳性。
1.2.3变频调速系统研究现状
起重机电机调速方式随着时间的推移也在不断的发生着变化,如今使用最多的即变频调速方式。变频器作为变频调速的中心具有调速平稳、功效强以及经济实用等优点。许大中团队在《交流电机调速理论》一书中指出 ,随着科技的发展其控制方法也在发生着变化:
,随着科技的发展其控制方法也在发生着变化:
恒定压频比控制方式:可以利用异步电机的等效电路实现变频调速功能 。它的特点是:控制电路不仅有简单的结构而且维修费用较低。但是由于该控制方式是通过改变电压调节电机的稳态磁通以及转矩的,因此无法实现动态控制实现的,它通过改变电压只能相应的调节电动机的稳态磁通和转矩,并不能实现动态控制。同时其具有较慢的转矩速度,电机转矩利用率也无法达到预期的要求。
。它的特点是:控制电路不仅有简单的结构而且维修费用较低。但是由于该控制方式是通过改变电压调节电机的稳态磁通以及转矩的,因此无法实现动态控制实现的,它通过改变电压只能相应的调节电动机的稳态磁通和转矩,并不能实现动态控制。同时其具有较慢的转矩速度,电机转矩利用率也无法达到预期的要求。
矢量控制方式:实质是通过对速度以及磁场的调控实现交流电机与直流电机两者之间的等效替换 。其中交流电机与直流电机之间的等价替换是通过坐标的变换实现的,包含转矩和磁通的解耦控制,显著的改善了起重机传动系统的动态特性,实现了交流传动的新的突破。但是,在实际的应用中,控制效果实际上远远没有理论上那么完美。
。其中交流电机与直流电机之间的等价替换是通过坐标的变换实现的,包含转矩和磁通的解耦控制,显著的改善了起重机传动系统的动态特性,实现了交流传动的新的突破。但是,在实际的应用中,控制效果实际上远远没有理论上那么完美。
直接转矩控制方式:该控制方式是在矢量控制方式之后发展起来的,属于变频控制技术。简单的来说,直接转矩控制方式就是让定子磁链的运动轨迹尽量满足正六边形。该控制方式实现方法简单,对各元件开关损耗较小,因此其适用场合要求不得频繁适用元件开关。直接转矩控制方式再实时计算电机转矩和磁链的相对误差后,再根据对电机定子磁链的相对位置的判断从而实现开关量的选择,满足要求。
当下,在控制理论的研究领域,国内许多研究成果已经引起了世界上的特别关注和重视,例如典型模糊控制系统、“模糊推理机分离元件样机”、控制倒摆等理论,为控制系统的设计奠定理论基础。其他的关于起重机智能控制领域的理论:如超载保护装置、变频调速、遥控等也都在逐步的进入大众的视野。
纵观全球起重机控制现状,其智能控制的发展趋势如下:
第一方面,大力运用直接转矩控制方法,从而实现运行效率的提高,在提高自动化运行程度的同时增大起重机智能控制领域的研究,改善其运行性能 。
。
第二方面,将机械、电子、液压、计算机等技术融为一体、采用先进的GPRS通讯、光缆技术,大力发展起重机自动化。
起重机的方向为大型化,其控制系统的可靠与稳定性也随之需要得到改善。可以通过完善逻辑控制技术以防由于用户的错误操作而导致的相应元件的算怀,提高可靠性。对于那些需要经常更换的元件,控制系统也要能做到对其及时的动态显示和报警,做到对紧急事故的预防。此外,数据总线技术也将逐渐的被用来简化整个电气控制线路的连接,从而有效地进行数据传输。
总之,提高起重机的使用性能和稳定性是当今一大热门方向,主要采取的方式为机电液一体化技术与交流变频调控技术的结合 。今后在起重机安全性领域的研究也会越来越多,越来越深入,通过对新型的安全防护装置的研究与开发,从而增强起重机的人性化、模块化以及标准化。
。今后在起重机安全性领域的研究也会越来越多,越来越深入,通过对新型的安全防护装置的研究与开发,从而增强起重机的人性化、模块化以及标准化。
1.3本文主要研究内容
- 第1章为论文的绪论部分,主要介绍此次研究的目的以及意义,随后对国内外研究现状进行分析,主要包括各模块:变频调速技术、PLC技术等部分的研究,还包含起重机控制系统日后研究方向。
- 第2章主要是阐述MQ4035门座起重机的各大机构并且对工作原理进行了简要的介绍。
- 第3章为控制系统分析与设计部分,对电源以及变幅机构和旋转机构的控制系统线路图以及控制方式展开较为详细的分析与设计,包括电动机、调速方式以及PLC的选型。
- 第4章为PLC程序部分,对各机构的控制程序以及具体控制方式进行较为详细的分析和设计,同时还对该设计的经济性和环保性进行了分析。
5)第5章为总结与展望部分,对本设计的设计内容进行简要的总结,并就今后的研究工作进行展望。
第2章 门座起重机简介
2.1概述
门座起重机的应用范围较广,主要涉及港口装卸、造船厂的船舶建造和安装以及大型水利工程的混凝土浇灌等领域。由于我国具有较长的海岸线,沿着这条海岸线有大连、上海、广州等幽冥的港口,包含有数百个泊位 。国民经济的交通运输以及贸易领域的顺利运行都需要港口泊位的参与,其重要性不言而喻。因此,为了减轻在装卸货物中的体力劳动并且在一定程度上提高劳动生产率,一般都选择使用门座起重机。事实证明,门座起重机不仅可以改善工作运行流畅性,还为港口的未来发展带来了良好的经济效益。
。国民经济的交通运输以及贸易领域的顺利运行都需要港口泊位的参与,其重要性不言而喻。因此,为了减轻在装卸货物中的体力劳动并且在一定程度上提高劳动生产率,一般都选择使用门座起重机。事实证明,门座起重机不仅可以改善工作运行流畅性,还为港口的未来发展带来了良好的经济效益。
门座起重机具有的最显著的特点就是在可以行走的门架下方安装了旋转的起重机,因此火车或者是汽车等交通工具可以在门架的空间内通过,这也就大大提高了港口码头前沿的狭窄地段的利用率。
2.2门座起重机组成
2.2.1变幅机构
起重机的变幅机构可以实现起重机幅度的改变,因此也就可以达到扩大起重机工作有效范围的目的。起重机的幅度对于不同类型的起重机而言具有不同的含义,比如对于旋转臂架类型的起重机来说,幅度主要代指的是取物装置中心线位置距离该起重机旋转部分中心线的距离;而对于对于非旋转臂架类型的起重机则具有不同的含义:指的是取物装置中心线与臂架下铰轴之间的水平距离。
由于起重机的作业要求不尽相同,因此变幅机构又可以根据不同的情况划分为工作性变幅机构和非工作性变幅机构两大类。工作性的变幅机构就是需要在每一个工作进程中实现变幅,而非工作性的则相反仅仅只是在起重机臂架的空间位置需要发生变动的时候才进行变幅,而在其他时候例如装卸和起吊货物的时候是不需要变幅的。工作性的变幅机构具有生产率高、变幅响应快等特点,而且可以实现带载运行。为了在工作时减少变幅运动所消耗的功率,工作性变幅机构会在物品运动时使其保持水平方向运动,从而实现臂架自重平衡,属于平衡变幅中的范围。而对于非工作性变幅来说,则是相反的,其为非平衡变幅并且结构较为简单。
变幅机构的驱动机构常见的分类有绳索滑轮组式,扇形齿轮式,曲柄连杆式,齿条式等几种。下面所介绍的驱动方式主要适用于门座起重机平衡变幅机构:
以上是毕业论文大纲或资料介绍,该课题完整毕业论文、开题报告、任务书、程序设计、图纸设计等资料请添加微信获取,微信号:bysjorg。
相关图片展示:
![(`]L[P]KO7I_O2[BF3RUZVB](http://www.biyelunwen.org/wp-content/uploads/2020/02/lw295_2020213221744623.png)


![A}01}UWW_HN~5~]P[(~_`IE](http://www.biyelunwen.org/wp-content/uploads/2020/02/lw295_2020213221744679.png)