4.基于PLC的门座式起重机起升机构控制线路设计毕业论文
2020-04-04 12:51:30
摘 要
门座式起重机适用于各大型码头、港口、堆场、货站等作业场所,应用范围广泛,节能,作业效率高,动作平稳可靠,安全性能高,在港口的装卸作业中发挥着十分重要的作用,占有着十分重要的地位,是港口常用的装卸设备。近几年来,PLC 技术与变频技术在起重机行业得到了推广和应用,取代了传统电气控制系统中采用接触器、继电器相关联的控制方式与采用转子串联切电阻的调速方式,提高了起重机控制系统的稳定性和电机的调速效率。
本文对门机起升机构控制系统进行分析与研究,分析了门机的装卸工艺流程,研究了门机起升机构的工作原理,确定了电气设计的技术条件。介绍了西门子S7-300系列PLC的硬件结构,利用编程软件STEP7 完成门机起升机构PLC 程序的编写,实现门机起升机构安全、可靠的运行。
最后,对门机控制系统的调速方法进行了分析与设计。在分析电机调速方法和负载特性的基础上,确定了变频矢量控制模式和变频器的电气接线。按照工艺和控制要求,对变频调速系统的附加设备交流电抗器,编码器等进行了选型。实现了门机的闭环精准调速控制。
关键词:门座起重机,PLC,变频调速
Abstract
The gantry crane is suitable for various large wharves, ports, yard and cargo stations. It has a wide range of applications. It has a lot of advantages such as energy saving, high efficiency, stable , reliable and high safety performance. It plays a very important role in the loading and unloading operation of the port, which is a common loading and unloading equipment in the port. In recent years, PLC technology and frequency conversion technology have been popularized and applied in the crane industry. It has replaced the traditional electric control system using contactor, relay related control mode and the rotor series cutting resistance speed regulating mode, thus improving the stability of the crane control system and the efficiency of the motor speed regulation.
This paper analyzes and studies the control system of the lifting mechanism of the gantry crane and analyzes the handling process of the gantry crane. It also studies the working principle of the lifting mechanism of the gantry crane, and determines the technical conditions of the electrical design. The hardware structure of the SIEMENS S7-300 series PLC is introduced, and the programming software STEP7 is used to write the PLC program of the lifting mechanism of the gantry crane, so as to realize the safe and reliable operation of the lifting mechanism of the gantry crane.
Finally, the speed regulation method of portal crane control system is analyzed and designed. Based on the analysis of the motor speed regulating method and load characteristics, the frequency conversion control mode and the electrical connection of the inverter are determined. According to the process and control requirements, the additional equipment of the variable frequency speed regulation system is selected. The precision speed control of the gantry crane is realized.
Key words: gantry crane, PLC, frequency conversion
目 录
第1章 绪论 1
1.1 研究背景及意义 1
1.2 国内外研究现状 1
第2章 门座式起重机 3
2.1 概述 3
2.2 技术参数 3
2.3 起升机构简介 5
2.4 门座起重机起升电机与制动器计算 5
2.4.1 电动机的选择 6
2.4.2 制动器的选择 6
2.5 本章小结 6
第3章 门座式起重机变频调速方案设计 7
3.1 变频调速分析 7
3.1.1 三相异步电动机的调速方法 7
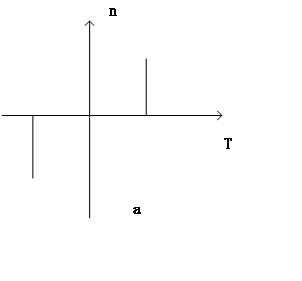
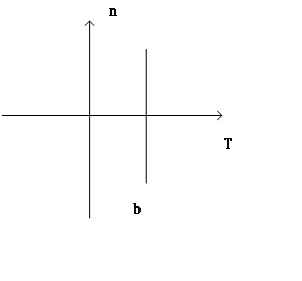
3.1.2 门座式起重机的负载特性 8
3.2 门座式起重机变频调速模式 8
3.3 矢量控制原理 9
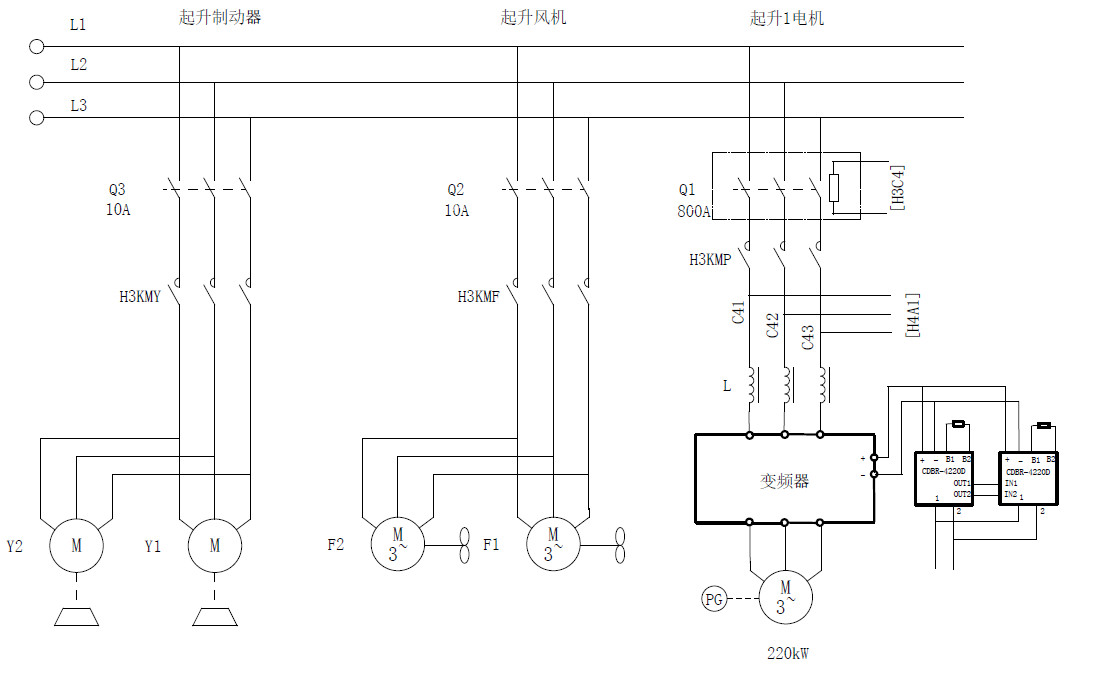
3.4 变频调速部分主电路设计 10
3.4.1 变频器的选择 10
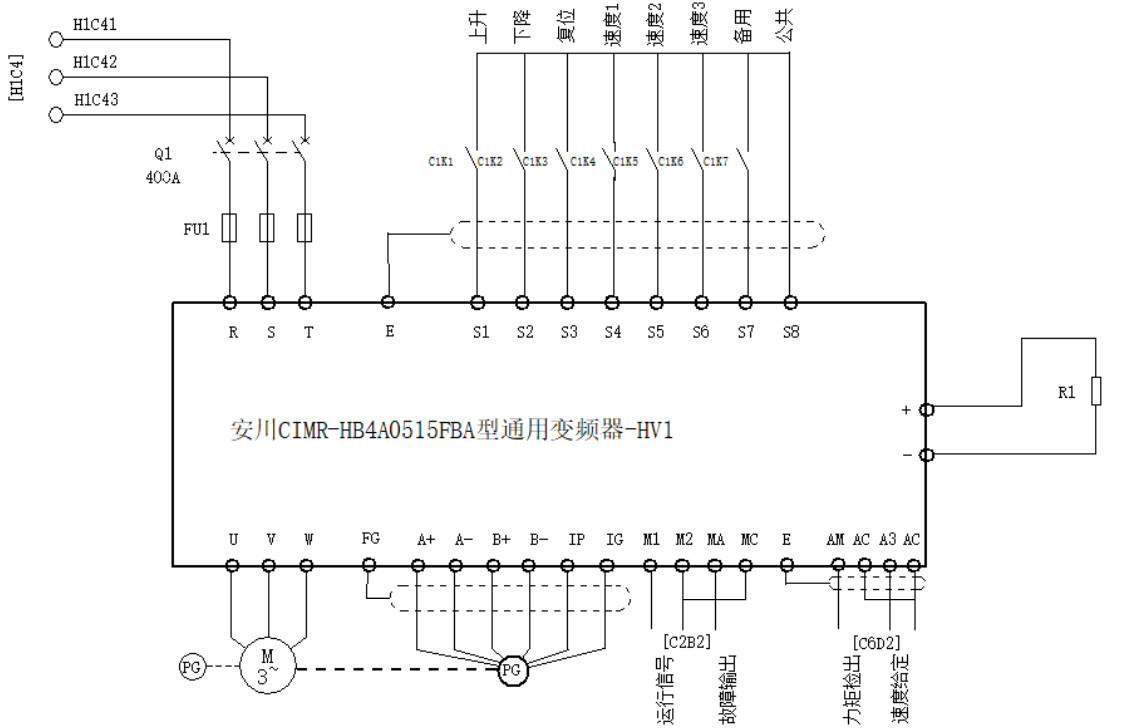
3.4.2 电气主接线 11
3.4.3 配套电气设备选用 12
3.4.4 变频调速部分的检测器件 13
3.5 本章小结 14
第4章 门座式起重机起升机构控制系统设计 15
4.1 综述 15
4.2 起升机构作业流程 15
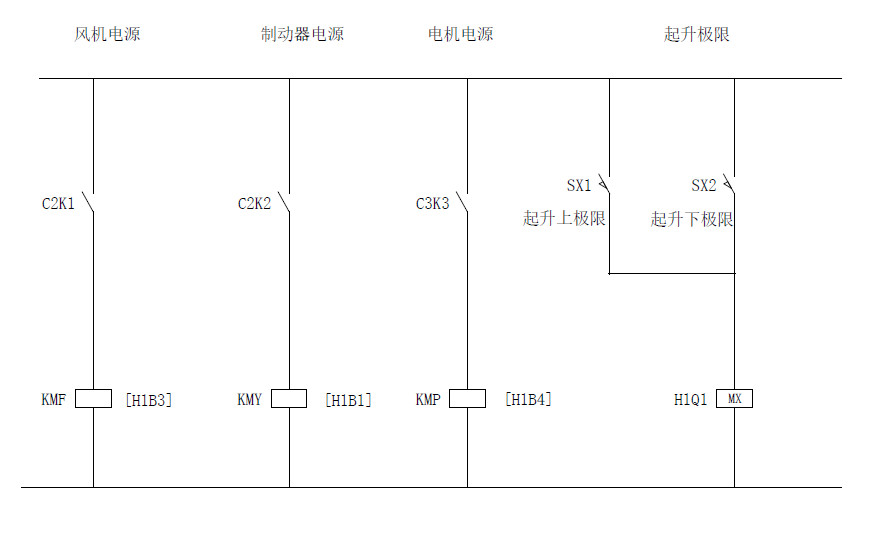
4.3 主电路设计 16
4.4 PLC控制程序设计 17
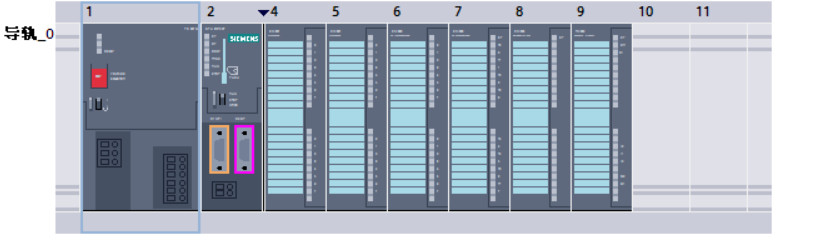
4.4.1 西门子S7-300系列PLC 简介 17
4.4.2 组态及地址分配 18
4.4.3 PLC控制程序设计 19
4.4 本章小结 24
第5章 经济性与环保性分析 25
第6章 总结与展望 26
参考文献 27
附录A 28
附录B 43
附录C 47
致谢 57
第1章 绪论
1.1 研究背景及意义
工业化时代的到来,生产力的发展越来越依赖于科学技术的发展。人们生活水平的提高,极大的促进了整个社会对各种资源的需求。有这些需求引发的一系列经济活动,需要比任何时候都要频繁的物资交换和比任何时候都高端的科学技术书的支撑。港口作为本国家间,国家与国家间的物与物交换站点,对于装卸、搬运、堆垛等操作的大型机械设备的要求也日益增加。门式起重机作为一种重要的物料搬运设备,在各领域的重要作用日益显现。随着经济的发展,它不仅在国民经济中占有重要的位置,而且在社会生产和生活的领域也不断扩大[1]。从20世纪后期开始,国际上门式起重机的生产向大型化、多功能化、专用化和自动化的方向发展[1] 。门式起重机具有一系列优点:成本低廉,机动性能较高,适应能力强等。为了满足实际情况,对装卸设备也提出了新的要求,因此,如何设计一个高性能的控制系统,做到高效,精准,节能,成为一个核心的课题。
这个核心问题的解决方法,落在了近年电子技术与信息技术的发展新成果PLC上。某种意义上讲,门座式起重机的更新和发展,在很大程度上依赖于传动部件与控制部件的发展。现今传动部件和控制部件更新换代,利用先进的电子技术和现代的机械设计方法实现了门座式起重机的自动化和智能化。随着计算机技术的发展,利用计算机和数字技术结合,实现了全数字化控制驱动,可编程控制,故障诊断及数据管理。使门座式起重机具有自动保护和自动检测,以适应现代化的生产需要[2]。PLC控制具有很多优点:目前国际著名品牌PLC能够保证干扰小,长时间不间断运行,正是因为PLC的实用性,它替代了继电器,做到了逻辑控制和顺序控制,大大减少理论中间继电器的数量,节约了成本,减少了故障点,对连续变化的量,做到了模拟和数字的转换,控制程序可以通过编程实现。达到精准控制。此外,PLC 控制器有可控性好、信息化水平高的优势,PLC 控制器能够通过逻辑设计将软硬件控制联系起来,从而实现系统预设功能的控制,并且系统中采用了新型信息通信技术,例如总线技术、网关以及逻辑地址等[3]。使用PLC 变频调速技术,可以在机器电机的负载情况的波动不同的情况下,做到依据个汇总不同的实际工作的需要和场景,控制出适合的电机转速;同时,还可以利用点击的低速转动来增加工程工作的精准度没减少在工程过程中的空隙间隔时间,整体上促进起重机工作效率[4]。
因此,将先进的可编程控制技术、编码器与变频控制技术应用到其控制系统,减轻司机的劳动强度,提高门机运行的可靠性与安全性,延长设备寿命,节约能源。
1.2 国内外研究现状
对于起重机控制系统的研究,国内外都有着较为成熟的技术与理论。国外的技术人员和学者对起重机做了大量的研究,这一方面要优于国内。2006年Wahyudi 和Jalani J 就提出将模糊逻辑控制器应用到智能门座起重机系统中,以控制门座起重机运行时的有效载荷位置和摆动角度,比传统的自动门式起重机具备更强的稳定性[5]。2017年Michael J. Toth, Colby F. Lewallen, Joseph C. Hanson等人就研究了一种半自动的PID控制器,评估了两种不同控制方法的剩余摆幅和鲁棒性。开发了一种半自动的方法,起重机操作员控制电梯方向和比例积分微分(PID)控制器调整架空台车位置。实验表明,该方法可使大多数非零倾斜角的残余振动峰值幅度降低约80%[6]。
而对于变频器的控制方式,早在1970年,德国的 F.Blasschke 等人就提出了矢量控制理论,在目前的工程应用中,如果对调速特性有较高要求时,大部分的生产工艺都应用基于矢量控制的变频调速装置[7]。
随着我国重工的快速发展,起重机的制造能力大大提高,在小吨位起重机的设计上已经具有国际领先水平,但在大型起重机的研发上与国外还存在较大的差距,国内门座起重机的可靠性和稳定性与国外相比仍有差距,在设计水平上急需改进[8]。首先,发动机、高质量钢材、液压件等核心部件的技术水平严重制约了我国起重机整体的技术研发。其次,国内起重机的设计注重的是满足设备功能的要求,设计周期短,在细节设计方面和国外存在较大的差距,并且加工制造工艺不成熟、设备精度不高[8]。要想赶超国外的技术水平,应当要学习借鉴他们的先进技术,并能结合当今最新的技术。
近年来,我国在门座起重机的设计和控制方面做了大量的研究。例如,浙江大学对门座起重机四连杆结构及其构件的稳定性进行了研究,并开发了一套基于Nastran的四连杆专用有限元分析平台,比传统有限元分析方法更精确[9];武汉理工大学对门座起重机形态设计进行研究得出了多套单臂架门座起重机形态设计的方案,对金属结构故障诊断系统进行研究为设备的维修提供了大量的参考依据[10-11];山东大学对门座起重机变频控制做了深入研究,增强了门座起重机的运行性能和稳定性,减少了故障率[12];湖北大学对门座起重机起升机构的运行情况进行研究,对其进行闭环变频调速控制,研究了抓斗的自动识别以及自动开闭斗的设计,较好的实现了起升机构的智能化[13]。
门座起重机总体的发展趋势是降低设备的生产成本,向大型化、高速化和专用化方向发展,提高设备的自动化、智能化和数字化程度,采用先进的软件仿真设计方法如有限元方法、有限差分法和虚拟设计技术,尽可能在投产之前解决可能遇到的大部分问题[8]。
第2章 门座式起重机
2.1 概述
 门座式起重机在港口的装卸作业中发挥着十分重要的作用,占有着十分重要的地位,是港口常用的装卸设备。门座式起重机为多用途杂货大型装卸设备,适用于各大型码头、港口、堆场、货站等作业场所,应用范围广泛,节能,作业效率高,动作平稳可靠,安全性能高 [8]。如图2.1所示,为门座式起重机的外观。门座式起重机底部为门型,减少了设计重量,并且适合下方车辆等通过,因此而得名。下方的门架部分为起重机的行走机构,主要作用是使得起重机可以通过轨道,左右行走,调整作业位置,以满足机动装卸要求。除此之外,门座部分还有防滑装置和均衡装置,可以保持平衡,不至于翻倒。
门座式起重机在港口的装卸作业中发挥着十分重要的作用,占有着十分重要的地位,是港口常用的装卸设备。门座式起重机为多用途杂货大型装卸设备,适用于各大型码头、港口、堆场、货站等作业场所,应用范围广泛,节能,作业效率高,动作平稳可靠,安全性能高 [8]。如图2.1所示,为门座式起重机的外观。门座式起重机底部为门型,减少了设计重量,并且适合下方车辆等通过,因此而得名。下方的门架部分为起重机的行走机构,主要作用是使得起重机可以通过轨道,左右行走,调整作业位置,以满足机动装卸要求。除此之外,门座部分还有防滑装置和均衡装置,可以保持平衡,不至于翻倒。
图2.1 门座起重机外观
门座以上部分,是起重机的旋转平台,可以实现360°的任意旋转。通过旋转平台的旋转,改变起重机的作业角度,配合以行走部分,实现灵活机动的装卸要求。安装在旋转平台上方的是司机控制室,以及起重机最重要的变幅机构与起升机构。变幅机构通过控制臂架的角度,控制起重机最外端起升钩子或抓斗的距离,调整起重机作业的区域。本文主要研究的起升机构在2.3部分介绍。
2.2 技术参数
门座式起重机按照相应的机械设计手册设计,相关的技术参数按照设计的要求进行选取。门座式起重机主要的设计参数有:起重量、幅度、起升高度、各机构的工作速度等。此外,还包括轨距,基距,轮压,自重等。
起升机构能够吊起的最大重量称为起重量,对于门座起重机等臂架类起重机,起重量不能满足实际使用情况对于货物是否能够被抬升等的衡量,因此起重能力大小常用起重力矩表示。起重力矩MQ通常用公式
 (2.1)
(2.1)
表示,公式中的PQ为起重量,R为相应的工作幅度。即同一起重机可实现不同的起重量。应当依据幅度对起重量进行选择,以免发生倾覆等。
臂架类起重机的幅度是其旋转中心与取物装置之间的距离,通常标称的幅度为最大幅度。由静力学理论可知,在力矩一定时,幅度增加,起重量减少。起重机在设计时,其幅度会按照设计要求选取确定[14]。例如需要满足港口装卸的门座式起重机的幅度应当由港口的停靠船只尺寸决定,特别需要注明的是,可以改变起重机幅度的装置称为起重机的变幅机构,不在本文的研究范围内。
起升范围指的是起重机最高的起升高度与最低的下降深度之间的距离。其中起重高度指的是起重机支撑面与上极限位置(取物装置最高工作位置)之间的垂直距离,用H表示。下降深度指的是起重机支撑面与下极限位置(取物装置最低工作位置)之间的距离,用h表示[8][14]。如图2.2所示
图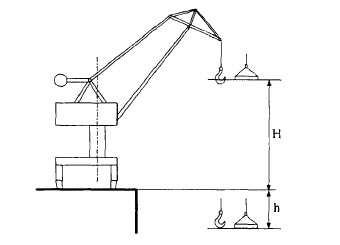 2.2 门座起重机起升高度示意图
2.2 门座起重机起升高度示意图
起升机构工作速度是指起升机构稳定运行的时候,吊具和重物的上升速度,用大写字母V表示,一般的起重机中,为了迎合不同的起升需求,一般通过技术手段,例如串电阻调速,变频调速等设置有多个档位的速度[8]。起升的速度对起重机的工作效率影响很大,因此,多工作在额定起升速度情况下,对应于起重机满载时电机功率时的转速。根据转速及卷筒参数,计算出起升速度。
本文研究的MQ4030型门座起重机主要技术参数见表2.1所示:
表2.1 MQ4030型门座起重机主要技术参数[12]
额定起重量 | 抓斗25t | 吊钩40t |
工作幅度 | 9.5m-30m | 9.5~25m |
起升高度 | 轨上 | 吊钩21m 抓斗12m |
轨下 | 15m | |
起升速度 | 抓斗:25m/min | 吊钩:50m/min |
最大轮压 | ≤25t | |
工作电源 | AC 10kV,50HZ | |
装机总容量 | 约670kW | |
总机重量 | 约320t | |
2.3 起升机构简介
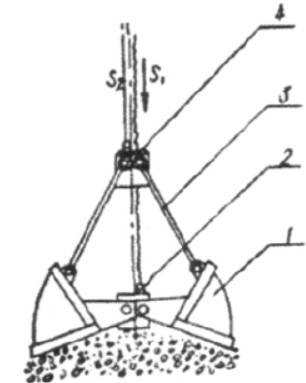
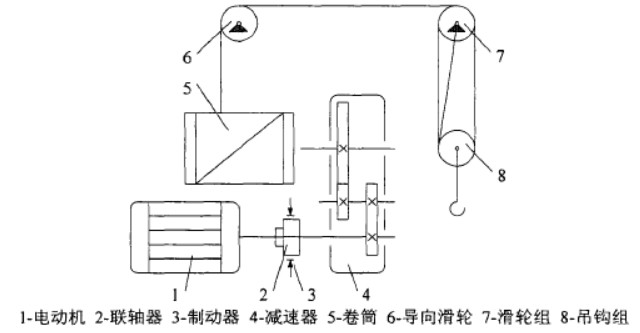 起升机构包括驱动、传动、卷绕、取物、制动和其他辅助装置等,是起重机最复杂,最重要的机构。驱动装置为电动机,变频器,传动装置为联轴器等,将电机的动力转换为驱动卷筒转动的装置。卷绕系统有卷筒,钢丝绳,滑轮组等,通过卷筒卷绕钢丝绳实现货物的升降。取物装置为抓斗,吊钩等。制动装置即为制动器,用于正常停止或紧急停止各运行机构。此外还有限位器,起重量限制器,编码器等。如图2.3所示为起升机构传动。
起升机构包括驱动、传动、卷绕、取物、制动和其他辅助装置等,是起重机最复杂,最重要的机构。驱动装置为电动机,变频器,传动装置为联轴器等,将电机的动力转换为驱动卷筒转动的装置。卷绕系统有卷筒,钢丝绳,滑轮组等,通过卷筒卷绕钢丝绳实现货物的升降。取物装置为抓斗,吊钩等。制动装置即为制动器,用于正常停止或紧急停止各运行机构。此外还有限位器,起重量限制器,编码器等。如图2.3所示为起升机构传动。
图2.3起升机构传动示意图
以上是毕业论文大纲或资料介绍,该课题完整毕业论文、开题报告、任务书、程序设计、图纸设计等资料请添加微信获取,微信号:bysjorg。
相关图片展示: