1.基于BPS条码定位的巷道式堆垛机升降控制系统设计毕业论文
2020-04-04 12:51:18
摘 要
近年来,随着物流业的快速发展,自动化仓储系统的应用越来越广泛。作为组成自动化仓储系统的重要物流装备,堆垛机的研究也越发深入。本文以堆垛机提升机构的控制系统为研究对象,对基于BPS条码定位系统的堆垛机提升机构的控制系统进行了设计研究。
首先,对条码定位技术的发展与构成进行了研究,分析了不同条码定位方式的特点,选择系统的条码定位方式。
其次,对系统的认址方案、速度控制方案、保护措施进行了选择,完成了系统的总体设计方案。
再次,分析了系统的功能要求,完成了对硬件设备的选型,设计了系统硬件接线图。
最后,分析了堆垛机升降控制的工作流程,对堆垛机升降控制系统的控制算法进行了设计。
本文设计的堆垛机升降控制系统能够满足堆垛机提升机构的各项功能,满足实际应用中的性能要求,在经济性和环保性层面也符合要求,具有一定的参考价值。
关键词:堆垛机提升机构;升降控制;条码定位
Abstract
In recent years, with the rapid development of the logistics industry, the use of automated storage systems is becoming more widespread. As an important logistics equipment that composes an automated warehouse system, the research on stacker cranes has become more and more in-depth. In this paper, the control system of the stacker crane lifting mechanism is taken as the research object, and the mechanical mechanism and control system of the stacker crane lifting mechanism based on the BPS barcode positioning system are designed and researched.
Firstly, state the development and composition of bar code positioning technology. Analyze the characteristics of different bar code positioning methods. Select the system's bar code positioning method.
Secondly, select the system's address scheme, speed control scheme, and protection measures, complete the overall design of the system.
Then, analyze the functional requirements of the system. The selection of hardware devices was completed and the system hardware wiring diagrams were designed.
Finally, analyze the workflow of the stacker crane lift control. Design the stacker crane lift control system, prepare the control program for the stacker crane lift control system.
The stacker crane lifting control system designed in this paper can meet the various functions of the stacker crane lifting mechanism, meet the performance requirements in practical applications, meet the requirements in terms of economy and environmental protection, and has certain reference value.
Keywords: Stacker crane lifting mechanism; Lift control; Barcode positioning
目 录
第1章 绪论 1
1.1 课题研究的背景及意义 1
1.2 堆垛机提升机构概述 1
1.2.1 堆垛机的发展 1
1.2.2 国内外研究现状 2
1.3 本课题主要研究内容 2
第2章 条码定位技术 4
2.1 条码技术的发展 4
2.2 条码定位技术概述 4
2.2.1 条码定位技术构成 4
1.3.2 条码定位系统特点 4
2.3 条码定位方式的选择 5
2.4 本章小结 5
第3章 堆垛机升降控制系统总体设计方案 7
3.1 PLC控制系统结构 7
3.2 堆垛机提升机构控制方式 7
3.3 系统认址方式选择 8
3.3.1 系统认址方案 8
3.3.2 光电认址片认址工作原理 8
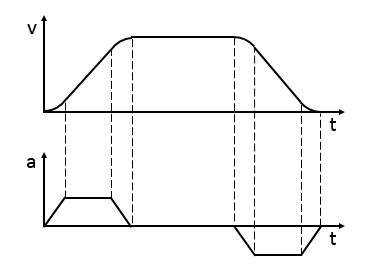
3.4 系统速度控制方式选择 9
3.5 安全防护装置 10
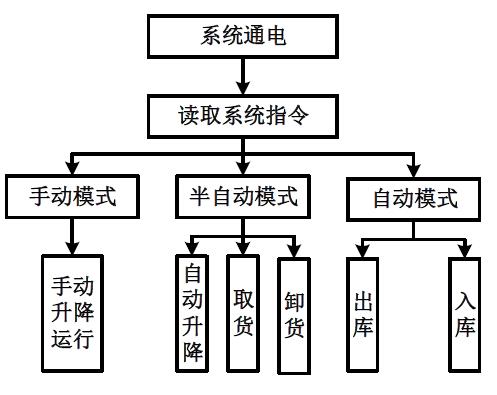
3.6 堆垛机提升机构工作流程 10
3.7 本章小结 12
第4章 设备选型及硬件电路设计 13
4.1 S7-300概述 13
4.2 系统设备选型 13
4.3 硬件电路设计 14
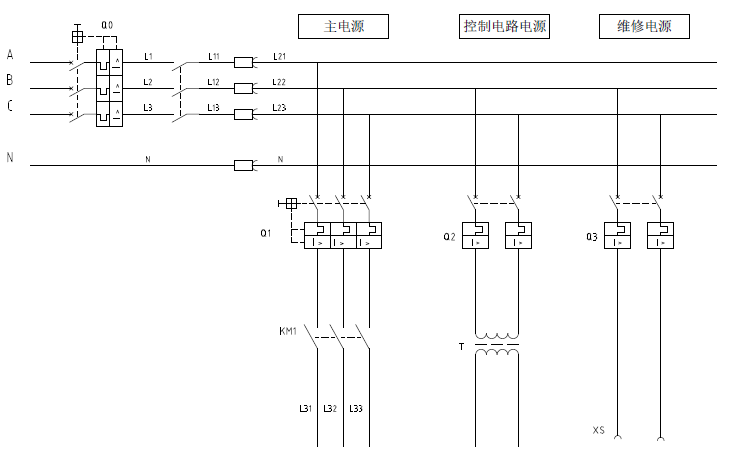
4.3.1 电源电路设计 14
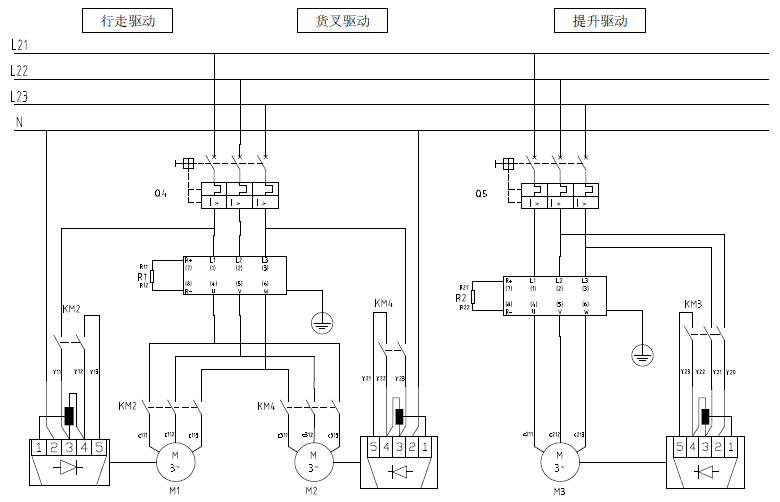
4.3.2 主电路电气图 14
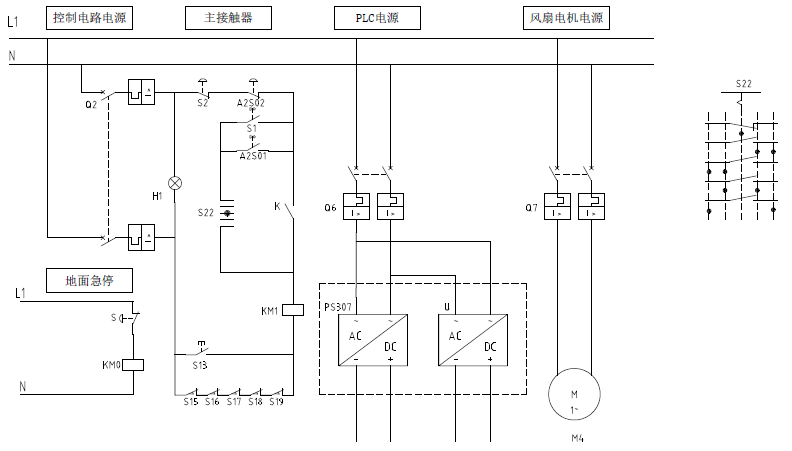
4.3.3 控制电路电气图 15
4.3.4 S7-300PLC硬件接线图 16
4.4 本章小结 16
第5章 软件程序设计 17
5.1 程序设计基本流程 17
5.2 PLC程序控制流程 18
5.2.1 初始化流程 18
5.2.2 作业控制流程 18
5.2.3 安全检测流程 19
5.3 控制系统I/O口分配方案 19
5.4 PLC程序设计 21
5.4.1 入库作业主程序 21
5.4.2 升降运行控制程序 22
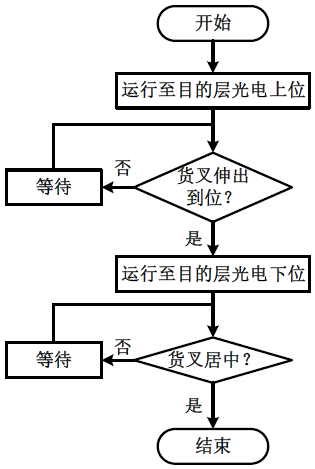
5.4.3 取货作业PLC程序 24
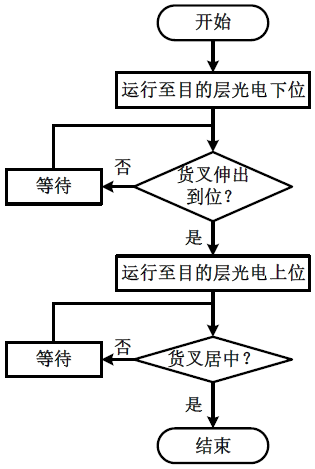
5.4.4 卸货作业PLC程序 25
5.5 本章小结 25
第6章 总结与展望 26
6.1 总结 26
6.2 展望 26
致 谢 27
经济性与环保性分析 28
参考文献 29
附录A 30
附录B 32
第1章 绪论
1.1 课题研究的背景及意义
随着我国社会经济的飞速发展,现代物流产业俨然成为了国家经济中不可或缺的服务行业。以2016年为例,当年全国社会物流总额达到了229.7万亿元。与此同时,随着更多先进的管理技术与科学技术的应用,物流行业的效率得到了提升。以国际通行标准来看,全社会的物流总费用占GDP的比例已经从2010年17.8%逐渐下降至2016年14.9%,但是同主要发达国家相比,还存在着不小的差距。作为物流产业的重要环节,仓储能够提高整个物流系统应对市场需求变化的能力,实现增值,而自动化立体仓库就是实现这一过程的重要组成部分。因此,随着物流行业不断发展,自动化立体仓库在不断优化进步。另一方面,随着我国用低成本、劳动力成本的上升,自动化立体仓库高层化、智能化的趋势越发明显。
自动化立体仓库高层化、智能化的发展趋势,对与之配合的其他装备提出了更高的要求。作为出库的最前端环节和入库的终端环节,堆垛机的作业效率对整个仓储系统的生产效率有着重要的影响。由于自动化立体仓库高层化、智能化的发展趋势,堆垛机也必须与之适应。高层化,要求堆垛机提升系统的速度、能力必须提高;智能化的要求使得堆垛机的控制系统必须更为可靠、信息化程度必须更高;因此,如何在保证安全可靠的基本要求下,利用现有生产技术能力,以较低的成本尽量提高堆垛机提升机构的速度、缩短其工作周期,同时实现智能化的要求具有很重要的现实意义与理论价值。
1.2 堆垛机提升机构概述
1.2.1 堆垛机的发展
巷道式堆垛起重机通常简称为堆垛机,是由叉车、桥式堆垛机演变而来的。按照系统中有无轨道,可以分为有轨堆垛机和无轨堆垛机。有轨堆垛机因其对地面损伤小、导向精度更高、摆动幅度更小等优点,广泛应用于各个自动仓储系统。
巷道式堆垛机,最早出现于1960年左右的美国,该堆垛机具有地面和位于货架上部的两根导轨,一根用于行走、导向,另一根导轨用于防止倾倒。20世纪60年代末期,在日本出现了高层堆垛机,与之相适应,联机全自动化立体仓库开始出现。直到1973年,堆垛机在低温自动化冷藏库中的成功应用,才逐渐取代了桥式起重机。正式在这一系列的背景下,我国于20世纪70年代初开始研究采用巷道式堆垛机的自动仓储系统。四十余年来,尽管自动仓储系统的应用越来越广泛,但是国内对于自动仓储系统的研究一直处于缓慢发展的态势。
1.2.2 国内外研究现状
堆垛机一般由机架、提升机构、运行机构、载货台及存取货机构、电气装置和安全保护装置等六大部分组成。其中,提升机构部件包括提升驱动电机、制动器、减速器及传动机构。由于提升机构的特殊性,堆垛机在垂直方向上要实现平稳停准和取放货物的“微升降”作业,因此,提升机构都备有低速档[22]。
运行速度、平稳性、认址精度等是衡量堆垛机提升机构的动态性能的主要指标。随着科学技术的不断发展,提升机构的驱动己由20世纪70年代的双速电动机改进为变频调速;目前,提升机构的工作速度一般为12~30m/min,最高可达48m/min[22]。在自动控制方面堆垛机主要采用闭环控制变频调速系统、Profibus总线控制等先进技术。尽管如此,同国外先进水平相比,国内堆垛机提升机构在认址精度、速度控制、使用寿命等方面还存在着一定的差距。
在很多的研究报告中,都是对一台堆垛机的控制系统进行设计,充分考虑到了水平运行、垂直提升和货叉伸缩三个部分。在系统软件控制方面,孙晶提出了前馈控制的方法进行堆垛机提升机构的速度和加速度控制,同时应用了气动方式取货和条码阅读器认址,在保证堆垛机提升机构的运行效率的情况下,提高了堆垛机运行的稳定性和准确性[3];针对堆垛机的定位控制系统,刘付超从堆垛机硬件和软件设计方面分析了堆垛机定位控制系统的二分步定位控制方法,并且经过Matlab软件仿真验证后,发现该方法在提高了堆垛机的定位精度的同时,有效改善了堆垛机的控制性能[4];龚秋生在分析传统的堆垛机机械结构的基础上,提出了堆垛机的结构的优化方式,在系统控制上,应用S型速度控制方式,极大减少了堆垛机在升降过程中因加速度的变化而造成的冲击,并由此提出了一整套的堆垛机控制方案[5];在BPS条码定位技术的应用方面,梁晓波提出了以BPS条码定位技术作为定位控制方案,构建了以PLC为核心的集装箱起重机自动控制系统[11];李小平提出了基于BPS条码定位技术的堆垛机速度控制与定位控制的方案,实现了堆垛机的绝对认址、无极调速,极大优化了堆垛机的运行效率[9];姜亚洲结合实际应用条件要求,采用激光测距仪和条码定位传感器作为测距测速传感器,设计了符合实际要求的堆垛机控制系统[10]。
综上所述,在堆垛机的软件控制方面,以PLC为核心控制器,结合变频器控制技术,S型曲线的速度控制方式成为了比较常用的堆垛机控制方式;在定位技术方面,传统的光电认址片认址仍然是主流,不过,随着BPS条码定位系统逐渐走向成熟、不断规范,BPS条码定位技术也因其便利性、错误率低的优点得到越来愈广泛地应用。
1.3 本课题主要研究内容
本课题主要以巷道式堆垛机提升机构为研究对象,采用BPS条码定位系统作为认址系统,以堆垛机提升机构的控制系统设计与优化为主要内容,以提高整个堆垛机工作效率为目标,设计出速度更优、控制更为稳定的堆垛机升降控制系统,本课题的主要研究内容为:
(1)对堆垛机提升机构的发展历史及研究现状进行了分析,在提出该课题的研究背景及研究意义的前提下,对课题的研究内容进行了规划。
(2)对BPS条码定位技术的发展与现状进行了研究,在与其他定位方式进行比较后,分析了条码定位技术的优点与特性。
(3)提出了自动化立体仓库堆垛机提升机构的控制系统总体设计方案,并对堆垛机提升机构的构成和工作流程进行了详细介绍。为保证堆垛机提升机构安全、可靠、平稳的运行,提出了相应的速度控制方案、安全保护措施。
(4)根据堆垛机提升机构的控制系统的实际要求,结合(2)所述的系统总体设计方案,对系统进行设备选型与配置,完成系统的电气连接方案。
(5)根据堆垛机提升机构的工作流程以及(3)中的电气连接方案,编写、调试相应的提升机构控制程序,以实现堆垛机提升机构控制系统更为有效地控制。
第2章 条码定位技术
2.1 条码技术的发展
条形码技术是集光电技术、计算机技术、通信技术、条形码印制技术于一体的综合性技术,它是光学的、机器识读的用以表示一定信息的标记;该信息通常是携带该条码的物体的描述。1952年,Norman Joseph Woodland和Bernard Silver联合发明了条形码,但当时的条形码还是环形的,并且需要配备巨型扫描仪才能完成扫描,条形码使用十分不便;因此直到激光镭射技术开始出现的20世纪70年代,条形码技术才开始实际应用于零售业,并开始飞速发展;本世纪初,基于条码技术的条码定位系统开始出现并不断发展,条码技术开始应用于立体仓库的认址。随着条形码技术多年来的实践应用,条码因其制作简单、信息收集速度快、准确率高、信息量大、成本低和条形码设备方便易用等特点,广泛应用生活和生产的各个领域,特别是物流和零售领域[19-20]。
根据信息表达方式的不同,条码可以分为一维条码和二维条码。由于在垂直方向上也能够获取信息,二维条码的信息密度更高、信息携带量更为庞大,具备了一维条码不具备的错误修正和防伪功能,增加了数据的安全性[19]。
2.2 条码定位技术概述
2.2.1 条码定位技术构成
尽管条码技术在零售和物流领域发展很早、技术也很成熟,但是条码技术在自动化仓储领域更多的是应用货物跟踪、仓储管理,很少应用于仓储设备的自动化运行。BPS(Barcode Positioning System)条码定位系统是近年来逐步发展出来的一种堆垛机认址方式。在国外的立体仓库中应用更早、也更为广泛;近年来,国内也逐渐开始出现了采用条码定位系统的立体仓库。
条码定位系统由条码带和条码读取头组成。在本系统中,条码读取头安装在载货台上,条码带全程安装在堆垛机立柱上;载货台升降过程中,条码读取头实时扫描当前的条码,通过内置解码器输出载货台当前的位置信息;将位置信息实时发送到堆垛机升降控制系统,系统根据接收到的位置信息以及测量到的速度完成对堆垛机运行速度的控制。
1.3.2 条码定位系统特点
条码定位系统集曲线长距离定位、条码读取快速精确等诸多优点于一身。同激光测距定位和编码器测距定位相比,条码定位最大的优点是高精度、高可靠性。同时,条码定位系统安装、调整简单,对安装精度要求不高。
在条码定位系统中,条码读取头可同时扫描多个条码(如图1.1所示),然后从这多个条码中取一个条码信息来确定当前的位置区域,因此在运行机构发生与运行方向相垂直的振动时,在一定范围内,条码读取头仍旧能够读取条码信息,防止由于激光线脱码而带来的误差和测量不稳定的问题,测量时几乎不受干扰。此外,条码定位系统可在轨道线路弯曲或一轨多车的情况下对堆垛机进行定位。
条码定位系统由于使用到了条码带,因此,由于灰尘、静电、液体腐蚀等的影响,条码带会受到一定程度的污损。此时,应该定期对BPS条码定位系统进行清洁、保养,出现了污损过大导致的条码信息难以读取的时候,应及时更换条码带。
条码定位系统具有高精度、高可靠性、读取速度快等优点,在经济性层面,同激光测距定位系统相比,其成本相差无几。因此,在BPS条码定位系统出现的短短十余年间,在自动化立体仓库中,特别是大型的立体仓库已经得到了越来越广泛的应用。
2.3 条码定位方式的选择
与条码的分类类似,条码定位技术也可以分为一维条码定位和二维条码定位。综合前文关于条码定位技术的讨论,为选择合适的认址方式,现将两种条码定位方式作如下比较:
表2.1 两种条码定位方式比较
比较内容 | 一维条码定位 | 二位条码定位 |
信息获取方向 | 水平 | 水平 垂直 |
信息携带量 | 小 | 大 |
识读速度 | 较快 | 较慢 |
制作成本 | 较低 | 较高 |
通过上表可以看出,相对于一维条码定位,二维条码定位出现较晚,技术更为先进,具有一定的后发优势,如:信息密度高,信息量大;容错率高,具有一定的自我纠错能力等。但是在条码定位系统中,尤其在大规模使用的工业、物流自动化领域,尤其需考虑成本、工作环境、读取速度等因素[21]。
对于堆垛机提升机构而言,升降运行的行程达到了十米左右,需要的条码带比较长,因此需要选用价格更为低廉的条码带。另一方面,现有技术水平下,一维条码中数字和字符所包含的信息已经能够满足对堆垛机提升机构位置信息的表示;同时,由于使用过程中需要处理更大的信息量,一般而言,二维条码的识别速度会较慢,进而影响堆垛机提升机构位置信息的实时监测效率,因此在已经满足堆垛机提升机构的控制要求下,选用一维条码定位的工作效率会更高。
2.4 本章小结
本章介绍了条码技术的发展历史,进而对条码定位技术的构成进行了研究,分析了条码定位技术的特点,同其他定位技术相比的优点。最后,根据不同条码定位技术的特点以及堆垛机提升机构的定位控制的要求,对条码定位的方式进行了选择。
第3章 堆垛机升降控制系统总体设计方案
3.1 PLC控制系统结构
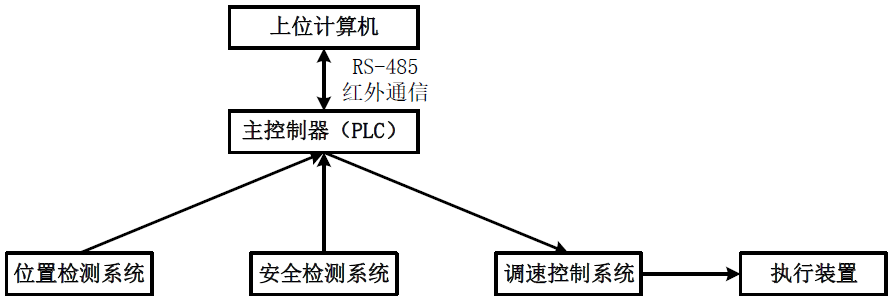 本文以单立柱、地面支承巷道式堆垛机的提升机构为研究对象,该提升机构的控制系统主要包括上位计算机、主控制器(S7-300PLC)、位置检测系统、安全检测系统、调速控制系统(变频器等)及执行装置等组成,系统的控制结构如图3.1所示。
本文以单立柱、地面支承巷道式堆垛机的提升机构为研究对象,该提升机构的控制系统主要包括上位计算机、主控制器(S7-300PLC)、位置检测系统、安全检测系统、调速控制系统(变频器等)及执行装置等组成,系统的控制结构如图3.1所示。
图3.1 PLC控制系统结构
以上是毕业论文大纲或资料介绍,该课题完整毕业论文、开题报告、任务书、程序设计、图纸设计等资料请添加微信获取,微信号:bysjorg。
相关图片展示: