基于eM-Plant的智能仓储多AGV调度仿真与优化毕业论文
2020-02-19 15:01:56
摘 要
随着社会经济和物流技术的发展,越来越多的仓储企业开始应用类kiva的多AGV系统进行作业。然而,如何根据拣选计划配置相应数量的AGV,使其满足需求的同时平均耗能最小化一直是企业关注的问题。针对这个问题,本文提出一种基于多Agent建模方法建立的智能仓储多AGV系统,详细设计了智能仓储中各类Agent(如订单Agent、拣选工作台Agent、货架Agent、AGV Agent)的功能。针对智能仓储中多Agent之间协同调度存在的问题,本文设计了一种基于合同网协议的多Agent协同调度方案。最后,本文通过eM-Plant软件,搭建了智能仓储多AGV调度仿真平台。在模型中将本文研究的AGV数量配置问题的优化目标、约束条件表达出来,并提取系统运行的多项性能指标。通过比较各种数量配置下智能仓储多AGV系统的性能指标,确定最佳的AGV数量配置。最后,通过具体的案例进行实验,验证了本文提出的方法的可行性和有效性。
关键词:智能仓储;AGV数量配置;eM-Plant;Agent建模方法;合同网协议
Abstract
With the development of social economy and logistics technology, more and more warehousing enterprises begin to use kiva-like multi-AGV system for operation. However, how to configure an appropriate number of AGVs according to the picking plan to meet the demand while minimizing the average energy consumption has always been a concern problemof enterprises. To solve this problem, this paper proposes an intelligent warehousing multi-AGV system based on multi-agent modeling method, and designs the functions of various agents in intelligent warehousing, such as order agent, picking workbench agent, shelf agent and AGV agent. Aiming at the problems of cooperative scheduling among multi-agents in intelligent warehouse, this paper proposes a cooperative scheduling scheme based on classical contract network protocol. Finally, this paper builds an intelligent warehousing multi-AGV scheduling simulation platform through eM-Plant software. The optimization objectives and constraints of the problem are expressed by the simulation model, and many performance indicators of the system operation are extracted. The quantity configuration of AGV is determined by comparing the performance indicators of the system under various quantity configurations. Finally, the feasibility and effectiveness of the proposed method are verified by applicatingan example.
Key words: Intelligent storage;AGV quantity configuration;eM-Plant;Agent modeling method;contract network protocol
目录
摘要 I
Abstract II
第1章 绪论 1
1.1 选题背景与意义 1
1.1.1 选题背景 1
1.1.2 选题目的及意义 2
1.2 国内外研究背景 2
1.3 本文主要工作及结构安排 4
1.3.1 本文的主要工作 4
1.3.2 本文的结构安排 4
第2章 基于多Agent建模方法 5
2.1 移动机器人执行系统(RMFS) 5
2.2 Agent的基本概念与特点 6
2.3 多Agent系统 6
2.4 基于多Agent的建模方法 6
第3章 基于合同网协议的多Agent协同调度 9
3.1 MAS系统的协作策略 9
3.2 经典合同网协议 9
3.3 基于合同网协议的多Agent协商机制 10
3.4 智能仓储多AGV系统数量配置问题数学模型 11
3.4.1 问题描述 11
3.4.2 基本假设 11
3.4.3 数量配置问题数学模型 11
第4章 仿真实验平台的搭建 13
4.1 eM-Plant的对象 13
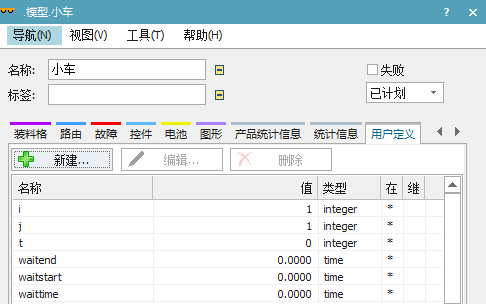
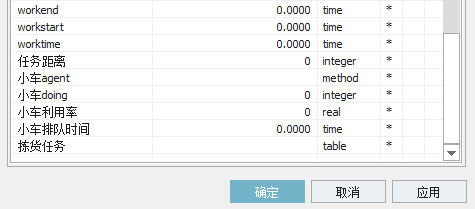
4.2 模型输入参数 13
4.3 仿真模型的构建 14
4.3.1 AGVPOOL子模块 14
4.3.2 订单资源池模块 16
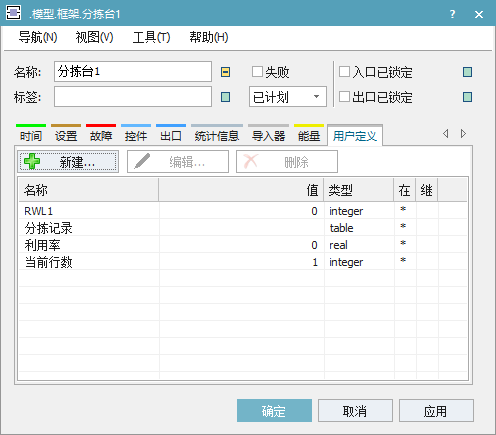
4.3.3 货架及拣选台模块 17
4.4 仿真系统评价指标 21
第5章 案例及实验结果分析 23
5.1 实验案例 23
5.2 实验一结果分析 23
5.2.1 AGV与拣选工作台利用率分析 23
5.2.2 AGV平均排队等待时间与系统拣选时间分析 24
5.2.3 订单等待时间和订单处理周期分析 24
5.3 实验二结果分析 25
5.3.1 AGV与拣选工作台利用率分析 25
5.3.2 AGV平均排队等待时间与系统拣选时间分析 26
5.3.3 订单等待时间和订单处理周期分析 26
5.4 实验三结果分析 27
5.4.1 AGV与拣选工作台利用率分析 27
5.4.2 AGV平均排队等待时间与系统拣选时间分析 28
5.4.3 订单等待时间和订单处理周期分析 28
5.5 实验结果总结 29
5.6 经济效益分析 29
5.6.1 企业经济效益分析 29
5.6.2 社会经济效益分析 30
第6章 总结与展望 31
6.1 研究总结 31
6.2 研究展望 31
致谢 33
参考文献 34
第1章 绪论
1.1 选题背景与意义
1.1.1 选题背景
仓储物流是现代物流的重要体现,是提升社会物流效率的重要环节。高效合理的仓储可以实现对资源有效控制和管理,同时可以提升货物的流通效率并降低货物流通的成本。随着社会经济的发展和自动化技术的发展,仓储物流也变得更加现代化与智能化。近年来,立体仓储,无限射频识别技术和多自动导引小车(AGV)系统[1]等都在仓储物流上得以越来越多的应用。机器人作为工业自动化的产物,已经大规模的应用到工业生产当中,使用机器人代替人工可以避免人工的重复劳动,大大提升了工业生产的效率。目前,仓储机器人技术[2]已经日趋成熟,越来越多的国家开始着手开发仓储机器人技术并在自己的仓储运营中应用仓储机器人。
2012年,亚马逊收购了kiva system,并在其物流仓储运营中应用了kiva system。此后,亚马逊平均每个订单的交付成本降低了20%-40%,使得国内外物流仓储行业开始认识到智能仓储AGV带来的巨大效益,促使智能仓储AGV的研究和应用得到了高速的发展。Kiva system的出现和应用,也促进了国内智能仓储机器人系统的发展,截至现在,国内已成立了五十余家智能仓储机器人公司。
在仓储系统中,类kiva系统[3]最大的亮点就是:它改变了以往的“人到货”的仓储作业模式,其仓储AGV可以将需求的货架搬运至拣选工位,而拣选人员只需在拣选工位处完成拣选作业即可。kiva系统的基础是一个个具有自动导航和即时通讯的智能仓储AGV,这些AGV可将可移动货架搬运到指定地点且每个机器人的负载量可达1.3t。系统与每个AGV之间通过wifi网络进行即时通讯,每个AGV也可以通过wifi获取其他AGV的位置信息进行避碰。仓库地面上布满了具有位置信息的二维码,AGV通过机身的摄像头识别二维码获取自己当前的位置信息。此外,每个可移动货架上也有一个标记身份信息的二维码,AGV通过扫描货架上的二维码识别需要执行搬运任务的货架。AGV利用自身集成的路径规划算法,并通过wifi进行位置信息的共享,实现路径规划和实时避碰。
Kiva系统作业模式与传统仓储作业模式相比,极大的提升了系统的分拣效率和分拣精确度,避免了人工拣货的低效率走动和人为因素造成的拣货周期的中断。kiva系统的优点主要有:(1)提高了拣选效率;(2)降低了人工成本;(3)提高了订单处理速度。
1.1.2 选题目的及意义
现阶段,“货到人”拣选系统[4]因其具有较高的拣选效率和存储效率,同时又能大幅减少人工,降低劳动强度等特点,正逐步成为行业主流,越来越多的应用于智能仓储系统。智能仓储“货到人”拣选模式与传统仓储拣选模式相比,智能仓储通过中央调度系统将任务分配给AGV并由AGV负责取货,拣货员只需站在拣选工作台前等待AGV将可移动货架搬运至工作台,再进行人工拣选,减少了拣货员在仓储中来回行走的过程。多AGV的引入可大幅度提高仓储中拣选作业的效率,降低拣选作业的出错率,减少工人的劳动强度,降低维护成本并且使仓储空间布局具有良好的重构性。然而,如何根据拣选计划配置相应数量的AGV,使其满足需求的同时平均耗能最小化一直是企业关注的问题。AGV数量不足则系统拣选效率不足,易造成订单积压。AGV数量过多,则会加大仓储企业的投入成本和资金压力,此外,系统中发生碰撞和堵塞的概率也会增加。
1.2 国内外研究背景
智能仓储多AGV系统是一个复杂的动态系统,系统中影响AGV数量配置的因素[5]有很多,如:仓储路径布局、装卸载时间、运行速度、路径规划策略、任务调度策略、交通阻塞策略、蓄电池充电特性等。因此,如何根据实际的生产因素配置合理数量的AGV是智能仓储多AGV系统的重要研究内容。
一些学者提出用数学算法分析求解此类问题,如2010年,JI[6]等以系统稳定性为目标,针对AGV数量配置问题,提出了一种求解AGV配置数量上界和下界的数学估算方法,最后再利用二分法确定具体的AGV数量配置。2010年,CHOOBINEH[7]等针对AGV数量配置问题提出一种通过多类封闭队列网络模型对AGVS进行建模,并通过线性规划方法求解系统最佳AGV数量配置的方法。2017年,傅正堂[8]在国内外对港口AGV的调度优化研究的基础上,针对多辆AGV进行装卸船协同作业的调度优化问题,建立了港口AGV调度优化数学模型,并且考虑AGV重载和空载的耗电差异,最后使用CPLEX工具进行实例求解。然而由于智能仓储多AGV系统具有很强的复杂性和动态性,交通流量、阻塞状况、装卸载时间等动态因素很难在数学模型中准确体现,因此通过数学算法求解此类问题,求得的AGV数量往往少于系统实际需求量。
近年来,越来越多的学者开始采用基于计算机系统仿真的方法来求解智能仓储多AGV系统所需的AGV数量。2011年,张远春[9]以智能仓储系统产能最大化为目标,建立了智能仓储多AGV系统AGV数量配置问题数学模型,并在模型中表达了生产工艺、AGV路径、调度规则等约束条件,最后利用eM-Plant软件建立仿真模型,采用仿真优化的方法求解该数学模型。2016年,杨雷[5]提出了一种数学分析与计算机仿真相结合的方法求解智能仓储多AGV系统AGV数量配置问题。首先以任务产生节拍,AGV导引路径网络布局、AGV调度策略等为约束,建立了估算 AGV 数量的数学模型。然后利用eM-Plant软件建立多AGV系统仿真模型,通过仿真模型表达数学模型中的条件约束,最后在模型中利用遗传算法求解该问题。2016年,韩晓龙[10]针对自动化集装箱港口中的AGV的调度策略和数量配置问题,利用eM-Plant软件建立了集装箱港口仿真模型,分析了不同的AGV调度策略及AGV配置数量对集装箱港口装卸系统效率的影响,从而确定集装箱装卸系统需求的最佳AGV数量配置。2017年,Marius Merschformann[11]提出了一种基于各项性能指标的AGV最佳数量配置算法,并建立了智能仓储多AGV系统仿真模型,在模型中考虑了十种不同的布局,其中包括各种数量的机器人,货架,拣选站和不同大小的存储区域,仿真结果证明了基于各性能指标的最优数量配置算法的可行性。2018年,Marius Merschformann[11]等通过仿真模拟了自动化智能仓库多AGV系统“货到人”的拣货和补货过程,在研究了订单分配、货架选择和货架存储分配等决策规则的基础上,改变机器人的数量、拣货站的数量、SKU的数量等参数,分析其对该系统性能指标的影响。从而确定在各种复杂决策规则条件下,目标性能指标最好的AGV数量配置。
综上所述,随着智能仓储的发展,国内外的众多学者对AGV数量配置问题以及AGV任务调度进行了诸多的理论探索和在应用领域的研究。前期的研究大多停留在用数学模型来估算AGV的数量的层面,然而通过数学模型往往难以准确的计算装卸载时间、交通状况、阻塞策略等因素对模型的影响,实际需求的AGV数量配置往往比通过数学模型求解的数量配置要多。近年来,国内外学者开始研究通过计算机仿真模型来模拟复杂的智能仓储系统,再将数学模型中的各个约束在仿真模型中表达出来,从而求解智能仓储AGV数量配置问题,这种方法能比较真实的反映装卸载时间、交通状况等其他一些因素对模型的影响,求得的AGV数量配置比较准确。然而,现阶段在仓储环境下AGV数量配置问题的研究和应用还不多。近年来,Agent技术的研究和应用进展很快,由于Agent具有自主性、社会性等特点,非常适用于仓储环境下的AGV数量配置问题研究,所以本文将多Agent技术与基于eM-Plant仿真建模技术相结合,搭建基于多Agent技术的智能仓储多AGV调度仿真系统。设计仿真实验,最后通过分析比较系统运行的各项性能指标,从而求解智能仓储多AGV系统的AGV数量配置问题。
1.3 本文主要工作及结构安排
1.3.1 本文的主要工作
基于“货到人”的类kiva多机器人智能仓储拣选系统的作业流程及动态变化特征,针对现有调度方法在资源利用率、系统拣选效率以及多智能体协同等方面存在的问题,本文提出基于合同网协议的多Agent协同调度方案,具体的研究工作如下:
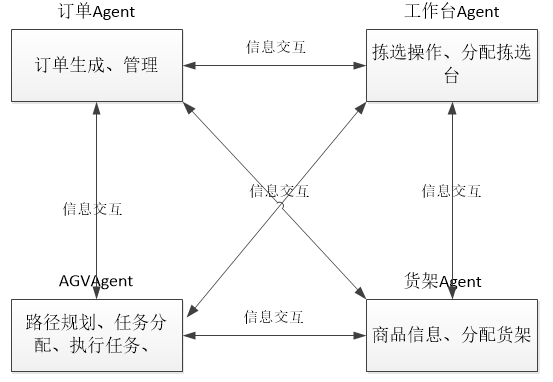
1)搭建多Agent协同调度框架,建立基于多Agent方法的智能仓储多AGV动态调度模型;
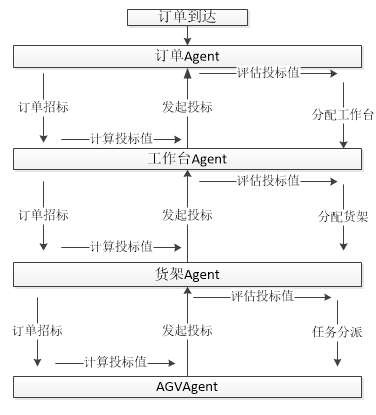
2)设计基于合同网竞拍法的调度策略,提出多Agent的任务分配协商机制;
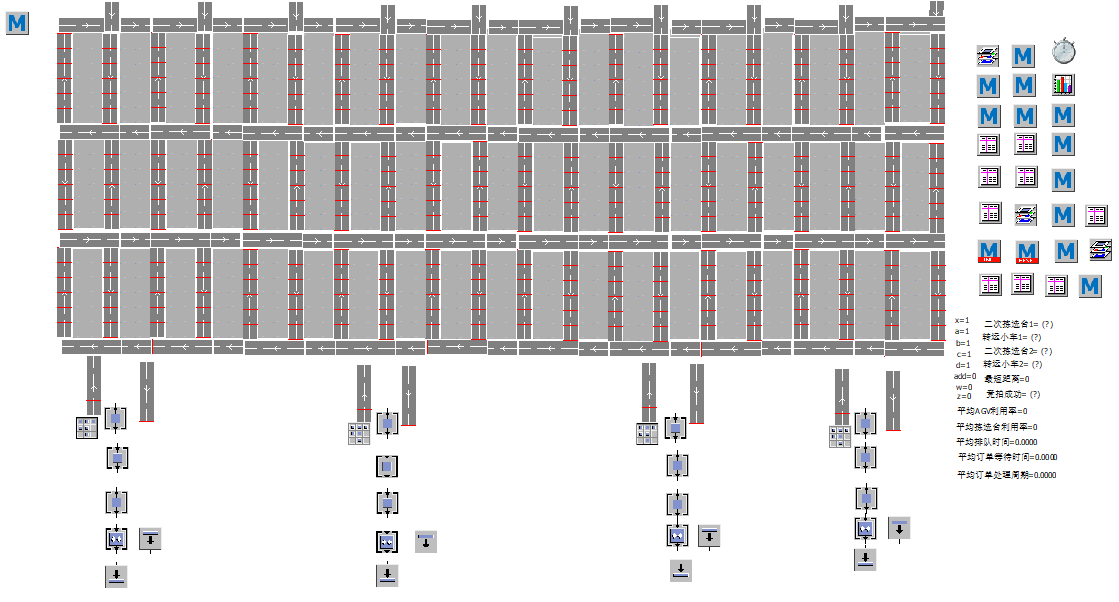
3)采用面向对象的建模技术,搭建基于eM-plant仿真软件的智能仓储仿真系统;
4)设计仿真实验,仿真结果分别以AGV利用率、AGV站前排队等待时间、系统拣选效率等多项系统性能指标,寻求调度系统最优设备数量配置。
1.3.2 本文的结构安排
全文的内容结构安排如下:
第一章介绍了题目的选题背景,选题意义,分析国内外智能仓储类kiva机器人动态调度系统的研究现状,针对存在的问题,指出本文的工作内容以及章节安排;
第二章介绍Agent、多Agent系统的基本概念与特点,详细介绍了基于多Agent技术的建模方法;
第三章搭建多Agent协同调度框架,建立基于多Agent方法的智能仓储多AGV动态调度模型,确定优化目标的数学模型;
第四章基于eM-plant仿真软件,搭建基于多Agent技术的智能仓储多AGV调度仿真系统。设计仿真实验,提取AGV利用率、AGV站前排队等待时间、系统拣选效率等多项系统性能指标;
第五章分析仿真实验数据结果,寻求调度系统最优设备数量配置,并针对结果进行经济效益分析;
第六章对研究内容及存在的问题进行总结与展望。
第2章 基于多Agent建模方法
2.1 移动机器人执行系统(RMFS)
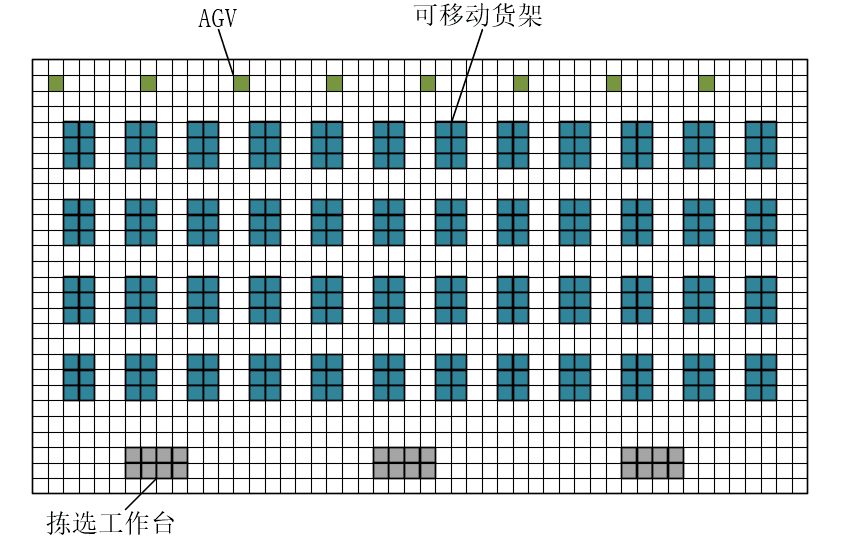 近年来,随着电商仓储物流的快速发展,传统“人到货”的仓储作业模式已经无法满足订单的处理效率需求。现阶段,智能仓库越来越多地采用新的仓储运营模式和货物拣选模式,以提高系统的拣选效率,降低仓储运营的成本。机器人移动执行系统(RMFS)是一种新型存储拣选作业系统,它改变了传统的人工走到货架前拣选的模式,改用AGV来运输可移动货架(场景见图2.1)到达拣选工作台进行拣选,不仅提高了系统的拣选效率,也避免了人为因素造成的拣货周期的中断且降低了人工成本。
近年来,随着电商仓储物流的快速发展,传统“人到货”的仓储作业模式已经无法满足订单的处理效率需求。现阶段,智能仓库越来越多地采用新的仓储运营模式和货物拣选模式,以提高系统的拣选效率,降低仓储运营的成本。机器人移动执行系统(RMFS)是一种新型存储拣选作业系统,它改变了传统的人工走到货架前拣选的模式,改用AGV来运输可移动货架(场景见图2.1)到达拣选工作台进行拣选,不仅提高了系统的拣选效率,也避免了人为因素造成的拣货周期的中断且降低了人工成本。
图2.1 RMFS基本布局
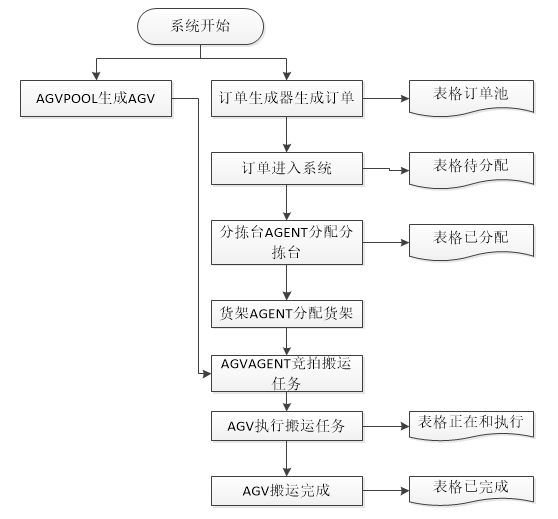
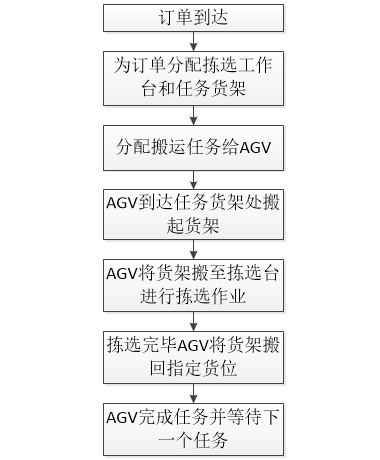 由图可见,智能仓库环境中主要包含以下几类设备:拣选工作台,可搬运货架,AGV。此外还有监控摄像机和标记位置信息的地面路标等。RMFS的运作流程如图2.2所示:
由图可见,智能仓库环境中主要包含以下几类设备:拣选工作台,可搬运货架,AGV。此外还有监控摄像机和标记位置信息的地面路标等。RMFS的运作流程如图2.2所示:
图2.2 RMFS作业流程图
2.2 Agent的基本概念与特点
Agent[12]的概念由Minsky在其1986年出版的《思维的社会》一书中提出。Minsky认为分布式计算机系统中的部分个体在发生矛盾的情况下,通过某种协商机制达成一个可接受的解而无需经过中央决策层进行处理,这类具有自己的决策判断能力的个体即为Agent。除了具有决策判断能力,Minsky提出Agent还应具有社会交互性和智能性的特点。从此,有关Agent技术的研究发展迅速并被引入分布式计算领域和人工智能领域。在分布式计算领域,人们通常把在分布式系统中能够自主判断决策、具有以下特征[13]的计算实体称为Agent。
1)进化性:Agent能学习和积累决策的经验,并会修正自己的行为。
以上是毕业论文大纲或资料介绍,该课题完整毕业论文、开题报告、任务书、程序设计、图纸设计等资料请添加微信获取,微信号:bysjorg。
相关图片展示: