基于CB导航的多智能体系统水上无人船编队控制毕业论文
2020-02-19 14:58:25
摘 要
无人船是目前多种技术多种领域交叉形成的一种新型装备,具有高效率、安全性好、应用领域广等优点,在水下测绘、水质监测、流速水面检测和流量测量、辐射监测等方面都有很开阔的应用前景。目前利用多智能体技术实现无人船的协同控制已成为研究热点。
本文应用船舶的导航技术,基于CB(Constant bearing)导航使无人驾驶船舶能够准确地跟踪目标船舶。在设计的导航技术的基础上,运用多智能体系统的思想,讨论编队控制方案及可行性。
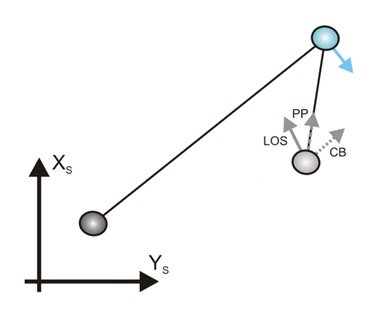
本文首先通过对于无人船导航技术的分析、几种制导律的对比来选取合适于进行协同控制的制导律,目前无人船的制导律研究中,LOS(Line of Sight)制导律使用较多,但是因为领航跟随使用CB制导律更加便捷,本文就选取的CB导航进行了公式的推导。并且介绍了多智能体系统与编队控制方法的应用,分析出可以实现的方案。
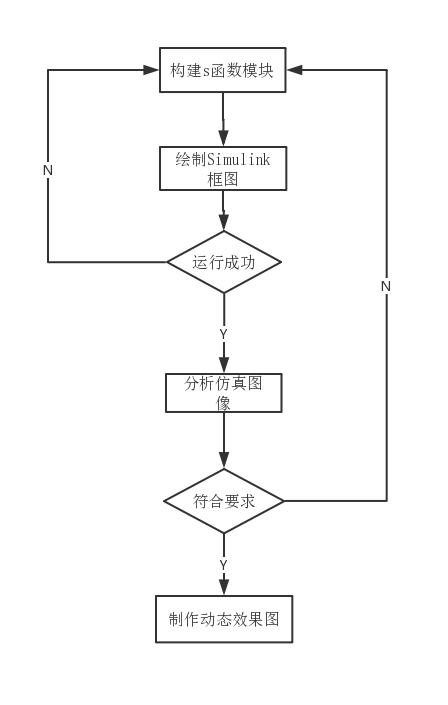
然后,就CB导航在多智能体编队控制中的应用,使用Simulink进行了仿真建模,运行出期望效果后,进行对于结果的分析,并制作出动态效果图。
最后,本文基于编队控制与CB导航技术撰写了结论,并总结论文还存在的一些不足之处以及可以深入研究的方面。
关键词:水上无人船;多智能体技术;编队控制;导航技术
Abstract
Unmanned ship is a new type of equipment formed by the intersection of various technologies and fields at present. It has the advantages of high efficiency, good safety and wide application fields. It has broad application prospects in underwater surveying and mapping, water quality monitoring, flow rate and water surface detection, flow measurement, radiation monitoring and other aspects. At present, the collaborative control of unmanned ship using multi-agent technology has become a research hotspot.
In this paper, the navigation technology of the ship, based on CB navigation, enables the unmanned ship to accurately track the target ship. On the basis of the designed navigation technology, the formation control scheme and feasibility are discussed by using the idea of multi-agent system.
This article first through the analysis for the unmanned vessel navigation technology, several contrasts of the guidance law to select suitable for cooperative control guidance law, the unmanned vessel the guidance law research of LOS guidance law use is more, but because of the use of CB radio on pilot follow guidance law is more convenient, so in this paper, the selection of the CB navigation formula is derived. The application of multi-agent system and formation control method is introduced.
Then, the application of CB navigation in multi-agent formation control using Simulink simulation modeling, running the desired effect, the results of the analysis, and the production of dynamic effect diagram.
Finally, this paper draws a conclusion based on formation control and CB navigation technology, and summarizes some deficiencies and aspects that can be further studied.
Keywords: Unmanned Surface Vessel; Multi-agent system; Formation control; Navigation technology
目 录
摘 要 I
Abstract II
第1章 绪论 1
1.1研究背景和意义 1
1.1.1 研究背景 1
1.1.2 研究目的及意义 1
1.2 国内外研究现状 1
1.2.1 多智能体系统发展现状 1
1.2.2 无人船技术发展现状 4
1.2.3 导航技术发展现状 6
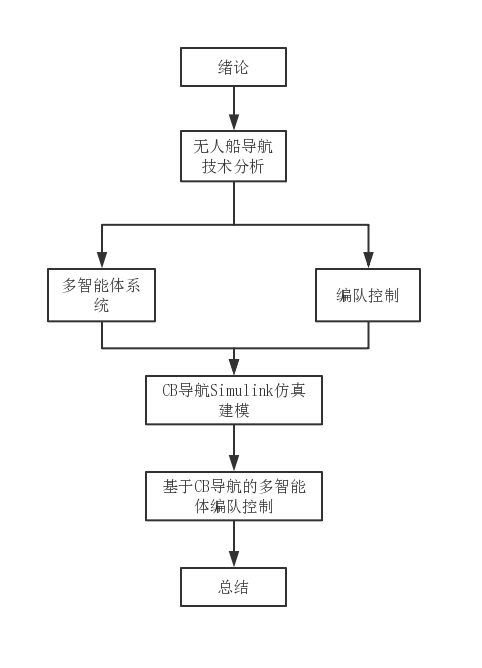
1.3 本论文的主要工作 7
1.4 本章小结 8
第2章 无人船部分技术分析 9
2.1 无人船关键技术介绍 9
2.2 导航技术在无人船协同控制中的应用 10
2.2.1 瞄准线(LOS)制导简介 10
2.2.2 纯跟踪(PP)制导简介 11
2.2.3 恒方位(CB)制导简介 11
2.3 基于CB导航的无人船导航原理 11
2.4 本章小结 13
第3章 多智能体编队分析 14
3.1 编队方法 14
3.2 现有编队方法中的不足 15
3.3 基于CB导航的多智能体编队分析 15
3.4 本章小结 16
第4章 基于CB导航的Simulink仿真分析 17
4.1 MATLAB简介 17
4.1.1 Simulink简介 17
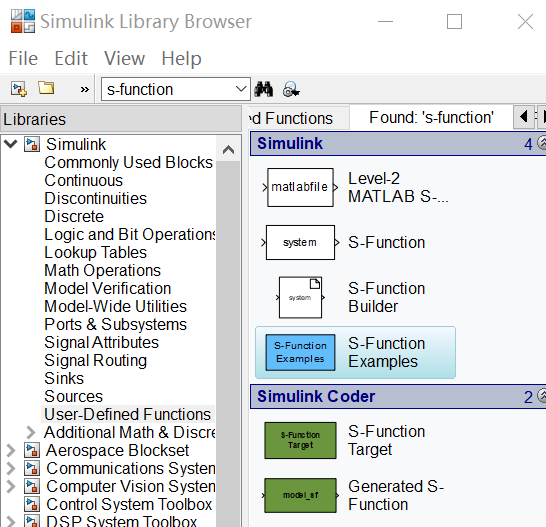
4.1.2 s函数简介 17
4.2 仿真要求 18
4.2.1 仿真目标 18
4.2.2 仿真工具 18
4.2.3 仿真流程 18
4.3 仿真 20
4.3.1 创建s函数 20
4.3.2 建立Simulink框图模型 23
4.4 Simulink模型仿真结果 24
4.4.1 静态图像分析评价 24
4.4.2 动态图像可视化分析评价 27
4.5 本章小结 29
第5章 总结与展望 30
5.1 论文总结 30
5.2 未来展望 30
参考文献 31
致 谢 32
附 录 33
第1章 绪论
1.1研究背景和意义
1.1.1 研究背景
多智能体系统(MAS或“自组织系统”)是由多个相互作用的智能体组成的计算机系统[1]。多智能体系统可以解决单个智能体或单个系统难以解决的问题。多智能体中的“智能”包括具有条理性、功能性、程序性的算法或强化学习方法。
多智能体系统不仅应用于学术研究,同样也在工业中应用。我们日常生活中,计算机游戏、电影工业里也存在着多智能体系统技术的应用[2],它们也被应用于军事中,比如协同防御系统。其他应用包括运输、物流、制造、智能网络GIS。多智能体最广泛的使用是在网络和移动技术中,它可以实现自动和动态负载平衡,具有高可扩展性和网络的自我修复功能。
无人驾驶船舶是一种无需远程控制、通过精确的卫星定位和自感知,可以在水面上按照预定任务进行航行的自动化水面机器人,简称水上无人船。
如今,许多国家已经开始开发无人驾驶船舶。一些航运巨头甚至乐观地预测,成熟的“幽灵船”技术可能只需要几十年就能改变全球海运的格局。另外一些人预测,到2021年,全球无人驾驶船舶的市场规模可能达到数百亿美元左右。无人船控制系统中,目前将船舶导航技术与多智能体系统相结合已经逐渐成为研究热点。
1.1.2 研究目的及意义
本文拟针对水上无人船的控制及导航需求,分析无人船协同控制特点,并应用多智能体系统的控制思想,设计出能适用于水上无人船的导航方法,并就其进行编队控制进行讨论研究。设计目标为应用船舶导航技术,无人船能够准确跟随目标船行进,并在已设计好导航技术的基础上利用多智能体系统的思想讨论编队控制方案及可行性。
1.2 国内外研究现状
1.2.1 多智能体系统发展现状
智能体的定义有很多,人们普遍承认的一种观点是:智能体是不需要人的参与而可以自动、自主地完成工作的一种个体。以下是对智能体的一些特点进行的总结:
(1)一定的自主权。智能体有着自发的自我预测的行为;
(2)合适的灵敏度。有着选择性的感觉和行为能力;
(3)较高的适应性。能够学习和提高经验;
(4)良好的协同能力。多个智能体在一起可以完成单个智能体无法完成的工作;
(5)强大的计算能力。能够对于采集而来的各种数据进行处理
智能体的定义也有广义与狭义之分,广义上只要能够自主决策的对象都可以称作智能体,而狭义上的智能体是就人们平常理解的那种具有人类思考模式的对象,类似于AI。智能体一般在其内部进行分析处理并做出决策指令,佐以程序或一定算法。
多智能体系统(Multi-Agent System, MAS)的基本理论是利用组成完整系统的各部分之间的相互作用关系,和各部分的原有行为或属性,在研究个体与个体、或者是个体与环境的过程中来对整个系统在运行中进行优化。多智能体系统在不同的领域中有着不同的定义,这里介绍一个比较普遍的定义:多智能体系统是由多个个体组成的系统整体。多智能体系统也是一种应用到多方面知识的系统,组成这个系统的每个个体具有以下性质:
(1)每个个体不能独立解决所布置的工作或是只能解决少量工作;
(2)分布式控制,不存在整体进行调控;
(3)所采集到或者是产生的数据都是分布于各个部分的;
(4)对于数据信息的处理是分开由不同的处理器进行演算的。
目前多智能体技术也是研究比较火热的一个领域,多智能体技术被应用于各行各业中,该技术正在快速发展中,可想而知多智能体系统也将为我们的生活生产带来很大的改变,在各种领域中发挥独特的作用。
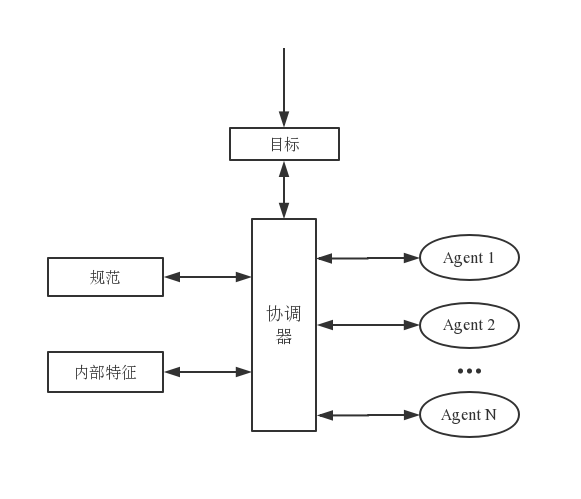 多智能体可以称得上是一群单个智能体的联合,各智能体按照预先规定好的协议内容,根据系统的期望状态和自身原本的性质,利用网络的通信来进行协商,确定和分配自身的任务,并在系统内部进行协调,共同完成指定的目标以解决对单个智能体来说比困难的任务。多智能体系统的典型结构如图1.1所示:
多智能体可以称得上是一群单个智能体的联合,各智能体按照预先规定好的协议内容,根据系统的期望状态和自身原本的性质,利用网络的通信来进行协商,确定和分配自身的任务,并在系统内部进行协调,共同完成指定的目标以解决对单个智能体来说比困难的任务。多智能体系统的典型结构如图1.1所示:
图1.1 多智能体系统结构示意图
多智能体系统通过分布式控制与计算,在控制理论研究中得到了非常多的应用,有许多协同控制方面的文献都应用到了多智能体系统的思想,本文也是就这个出发点才进行了后续的研究工作。
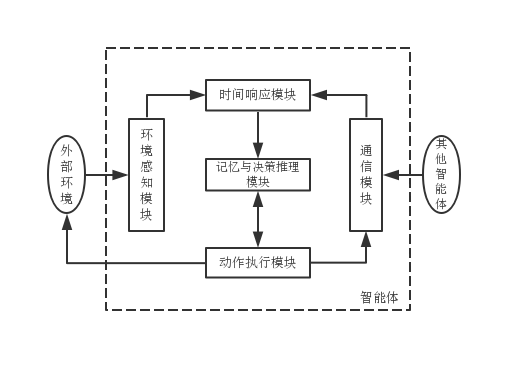 多智能体系统交互行为就是对于信息的处理。多智能体系统特点就是分布式控制,多智能体系统的各组成部分不仅自身可以处理规定的任务,在相互之间进行信息的交换之后,或是中央控制器收到了各智能体采集到的信息之后,可以进行分析处理难度更高、更为复杂的数据。单个智能体结构如图1.2:
多智能体系统交互行为就是对于信息的处理。多智能体系统特点就是分布式控制,多智能体系统的各组成部分不仅自身可以处理规定的任务,在相互之间进行信息的交换之后,或是中央控制器收到了各智能体采集到的信息之后,可以进行分析处理难度更高、更为复杂的数据。单个智能体结构如图1.2:
图1.2 智能体结构图
1.2.2 无人船技术发展现状
在二战时期无人船技术便开始发展,冷战期间两超对峙使无人船技术得到了快速发展的契机,到了21世纪,无人船也逐渐从军用渐渐走到了民众的视线中。无人船一般正式的称谓是“无人水面艇(Unmanned Surface Vessel,简称USV)”[3]。无人船也逐渐成为军事研究的热点,开展USV研制的国家和地区主要有美国、德国、法国、英国、以色列、俄罗斯、新加坡、日本等。现有的USV基本由美国及盟国研制,其中美国和以色列在USV军事方面占有领先地位[4]。
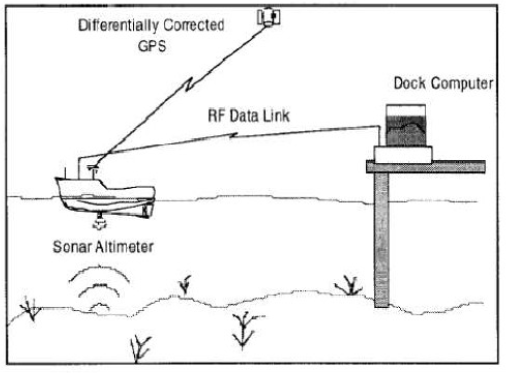
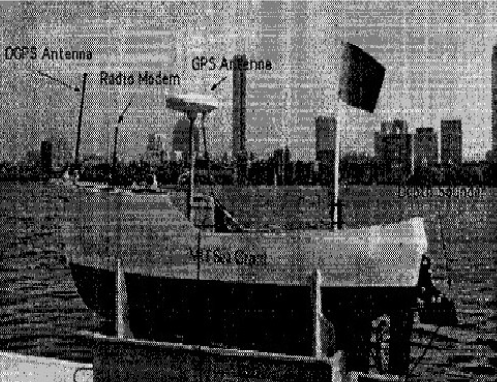
国外对无人艇的研制时间相对较早,且当下技术比较成熟。自1993年至2000年,麻省理工学院海洋学院计划开展了一项水上无人船开发计划[5]。目标是开发一种轻型自动水面船用作教育用途,并且具有精密测量的功能[6]。第一个开发的测试无人船是ARTEMIS,由一艘为1.37m长的拖网渔船改造,最初用于模型盆测试,配备电动马达和伺服驱动舵[6]。该船虽然对于沿海和开阔海洋应用而言太小,但证明了自动航向控制和基于DGPS的航路点导航的可行性,以及自主收集水文数据的可能性,特别是证明了其可以对安装了无线电调制解调器的ASC进行人工监督控制。
 从1998年到2000年,德国联邦教育研究和技术部赞助了MESSIN项目,用于开发和测试ASC Measuring Dolphin,其使用了高精度定位和轨道引导技术,在浅水中工作并且携带测量装置[7]。Measuring Dolphin为双体船型船舶设计,目的是用于优化承载能力并最大限度地减少波涛汹涌的海浪中的无序运动。船体采用玻璃纤维材料制成,使用了SWATH原理设计。通过在每个船体上具有反向旋转螺旋桨的方向舵保证推进和转向,同时开发了混合能量供应系统(铅酸蓄电池加上用于发电的内燃机)。在世界范围内,几乎所有国家都在研制开发USV,例如2005年意大利研发了双体USV Charlie,这艘无人船可以对海洋的大气数据进行收集,也可以对水面表层样本取样[8]。由于国外尤其是西方国家对USV研制的时间早且投入力度大,使得他们掌握了当下USV的先进技术,而我国对USV的研制起步晚,所以更应加大投入力度,以期自主掌握核心技术拥有更多话语权。
从1998年到2000年,德国联邦教育研究和技术部赞助了MESSIN项目,用于开发和测试ASC Measuring Dolphin,其使用了高精度定位和轨道引导技术,在浅水中工作并且携带测量装置[7]。Measuring Dolphin为双体船型船舶设计,目的是用于优化承载能力并最大限度地减少波涛汹涌的海浪中的无序运动。船体采用玻璃纤维材料制成,使用了SWATH原理设计。通过在每个船体上具有反向旋转螺旋桨的方向舵保证推进和转向,同时开发了混合能量供应系统(铅酸蓄电池加上用于发电的内燃机)。在世界范围内,几乎所有国家都在研制开发USV,例如2005年意大利研发了双体USV Charlie,这艘无人船可以对海洋的大气数据进行收集,也可以对水面表层样本取样[8]。由于国外尤其是西方国家对USV研制的时间早且投入力度大,使得他们掌握了当下USV的先进技术,而我国对USV的研制起步晚,所以更应加大投入力度,以期自主掌握核心技术拥有更多话语权。
 图1.3 ARTEMIS无人船 图1.4 ARTEMIS自主执行检测工作
图1.3 ARTEMIS无人船 图1.4 ARTEMIS自主执行检测工作
图1.5 意大利Charlie号双体无人船
水上无人船相比于传统的船舶具有很多显著的优势:
(1)第一点是无人船的本质特点,水上无人船可以达到作业无人化的效果。无人船相对于传统船舶最明显的不同就是其处于高度自主的状态,基于其智能化的控制算法。人类可以从工作一线转移到在岸边进行指导,一般无人船在设定好路径和工作任务之后,就不需要或者很少需要人的参与,将人从一些危险性比较大、强度比较大的任务中解放出来。
(2)第二点是无人船使用的控制算法使其能够比人更高效率更标准地完成工作。现阶段,国内的无人船船体长度为1米-7.5米、速度最高可达到40节。无人船具有小船体、高航速、自主航行等特点,并且由于其高机动性和高智能化,如果使用无人船作业的话可以极大减少人工成本,并且在船舶的调度、维护等方面的成本都会极大地降低。技术成熟的无人船在时刻变化的各种环境中都可以利用它本身机动性强、精确性强的特点,更为高效地执行任务。同时,因为计算机控制作业过程,可以让作业过程严格按设定执行,任务结果更准确、更标准。
(3)无人船可按照分模块进行设计。模块化的设计方式使无人船的功能变得更加丰富,不同的模块有不同的功能,搭载何种工作模块,无人船就可以完成何种工作任务,使工作更为高效便捷。
(4)无人船的速度快、灵敏。因为目前世界上的无人船长度多为10m以下,且无人船一般负载较小,动力比较强,在经过狭窄处或是执行某些活动空间较小的任务时有很大的优势。
(5)小巧灵活、可以很好地实现隐蔽也是其一大特点。这个特点在军事上应用前景很广阔,无人船外形一般都较低矮而且外表光滑,表面上又有各种涂料能够更好融入环境,体积小也使其能够借助海浪或者礁石从而达到隐蔽的效果,因此其本身的安全性也较好,不容易遭到损坏。
(6)无人船使用更加方便。因为无人船降低了维护所需要的成本,不仅可以大批量使用、而且无人船的活动随时随地可以进行,体量小、使用起来较传统船舶门槛较低,所以较传统船舶来说无人船更为方便。
1.2.3 导航技术发展现状
导航和运动控制是所有车辆及船舶的基本技术,所有运动控制系统都需要一个导航组件,导航技术是一种基本方法,它涉及与实现运动控制目标有关的瞬态运动行为。
导航定义为:引导物体走向某一点的过程,目标点可能大概率处在移动中[9]。此外,惯性导航之父Charles Stark Draper指出:制导依赖于基本运动原理,涉及的装置与地面、水面、水下、空中、地球重力场之外的大气层以及该重力场之外的太空中移动的设备类似[10]。船舶导航技术主要提供结合位置计算、惯性分辨率、地图匹配、卫星定位和无线电信号的导航技术,并帮助船舶本身建立动力学分析和位置参数。
在现阶段的研究中,导航技术在船舶等交通工具中应用较为广泛,并多以综合导航系统的形式应用,综合导航系统利用基本导航原理,加上各种传感器的配合使用,采集船舶航向数据、高精确度的位置数据以及船舶即时的速度数据,使用这些数据进行综合分析处理来保障船舶的行驶安全。信息化时代,航海方面的软件也是船舶安全航行的保障之一,此类软件也具有导航以及对航路进行监测分析的功能,若是船舶无意间进入风浪比较大的区域、或是海盗区,这类软件就会给船员发出警报。航海方面的软件也会基于导航技术进行制作与研发。目前导航系统可以实时监测到船舶的装载量、船体状况等影响到航行安全的重要数据。
现阶段在很多领域都用到了制导技术,特别是在军用与民用两大领域中发挥了它极其强大的作用。在以后的研究中,导航技术会朝着越来越智能化、一体化、系统化的方向发展,为人们的生活、社会的发展带来更大的贡献。
以上是毕业论文大纲或资料介绍,该课题完整毕业论文、开题报告、任务书、程序设计、图纸设计等资料请添加微信获取,微信号:bysjorg。
相关图片展示: