多传感器小车控制系统的设计与研究毕业论文
2020-02-19 14:57:58
摘 要
近年来,随着智能机器人技术的发展,智能小车开始逐渐运用到现代社会的各个领域,它未来的发展前景非常可观。本文中,我们设计了以STM32F103RCT6为主控制器的多传感智能小车,并对其控制系统进行了研究。
首先我们确定了小车总体控制方案的设计并对其功能模块进行划分。其次,我们对各功能模块所需的传感器分析比较,进行合理选择,并完成相应电路的设计。然后对用到的编程软件Keil uVision5以及涉及的PID算法进行介绍,同时完成各模块程序的编写以及调试。接着,我们用Matlab对PID的过程进行仿真,并且进行了多组参数的比较以及优化操作。最后,运用实验的方式对小车的各项性能进行测试,达到任务要求。
关键字:STM32、传感器、PID
Abstract
In recent years, with the development of intelligent robot technology, intelligent car has been gradually applied to various fields of modern society, and its future development prospect is very promising. In this paper, we design a multi-sensor intelligent car with STM32F103RCT6 as the main controller and study its control system.
First, we determine the overall control scheme of the car design and its functional modules are divided. Secondly, we analyze and compare the sensors required by each functional module, make a reasonable choice, and complete the corresponding circuit design. Then it introduces the programming software Keil uVision5 and the PID algorithm involved, and completes the programming and debugging of each module. Then, we use Matlab to simulate the PID process, and a number of parameters comparison and optimization operation. Finally, the performance of the car is tested by means of experiments to meet the task requirements.
Keywords: STM32, sensor, PID
目录
摘要 i
Abstract ii
第1章 绪论 1
1.1 课题选题背景 1
1.2 本课题的研究目的与意义 1
1.3 国内外研究现状 2
1.3.1 国外多传感器智能车辆研究现状 2
1.3.2 国内多传感器智能车辆研究现状 3
1.4 本文研究内容 4
1.5 本章小结 4
第2章 多传感器智能小车硬件设计 5
2.1 多传感器智能小车控制系统方案 5
2.2 电源系统设计 6
2.3 微控制器模块 6
2.3.1 主控制器选择 6
2.3.2 主控制器的最小系统电路 7
2.4 串口电路 8
2.5 电机驱动模块 9
2.6 循迹系统设计 11
2.7 避障系统设计 12
2.8 红外遥控 WIFI摄像头模块设计 13
2.9 蓝牙控制 测距测速模块设计 15
2.10 本章小结 18
第3章 多传感器智能小车软件设计 19
3.1 软件开发平台介绍 19
3.2 PID控制 19
3.3 功能程序设计 21
3.3.1 电机驱动模块程序设计 21
3.3.2 循迹系统设计 21
3.3.3 避障系统设计 22
3.3.4 红外遥控程序系统设计 22
3.3.5 蓝牙控制 测距系统设计 22
3.3.6 蓝牙控制 测速 速度控制系统设计 22
3.4 本章小结 23
第4章 PID控制仿真 24
4.1 符号说明 24
4.2 根据连续系统建立差分方程 24
4.3 基本PID控制原理 24
4.4 PID输出比较 25
4.5 改进PID算法 27
4.6 Simulink仿真 27
4.7 本章小结 29
第5章 系统测试 30
5.1 循迹系统测试 30
5.2 避障系统测试 30
5.3 红外遥控 WIFI摄像头系统测试 31
5.4 蓝牙控制 测距系统测试 32
5.5 蓝牙控制 测速 速度控制系统测试 33
5.6 本章小节 33
第6章 总结与展望 34
6.1 总结 34
6.2 展望 34
参考文献 35
附录A 36
附A1 电机驱动模块程序 36
附A2 循迹系统程序 37
附A3 避障系统程序 38
附A4 红外遥控系统程序 39
附A5 蓝牙控制 测距系统程序 40
附A6 蓝牙控制 测速系统程序 42
附录B 44
附B1 PID仿真代码 44
附B2 PID仿真比较代码 45
附B3 PID仿真改进代码 46
致谢 48
第1章 绪论
1.1 课题选题背景
早在20世纪,移动机器人因为最贴近人类生活,开始成为机器人研究领域的焦点,受到越来越多的关注。随着第一台移动机器人的出现,越来越多的移动机器人出现在世界各地,为移动机器人的发展奠定了基础。
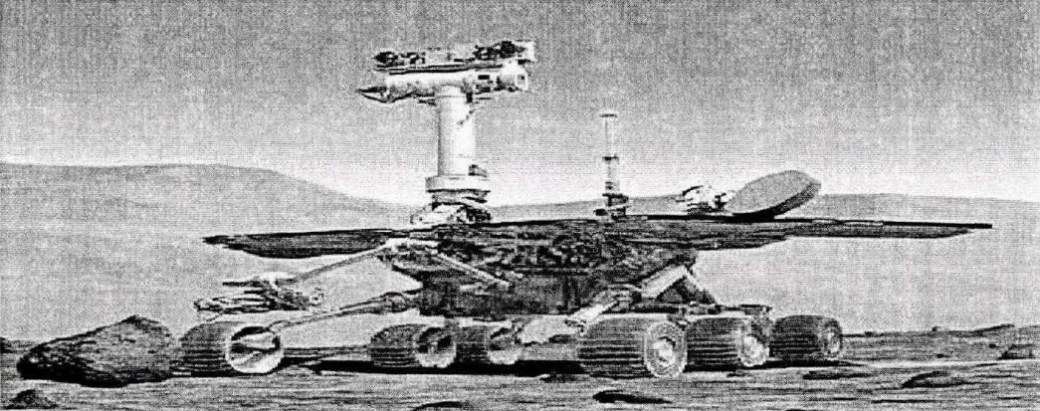 20世纪中后期,为了在航空航天领域有进一步的发展,科学家开始将移动机器人技术应用其中,使其不再仅限于人们的日常生活。图1.1显示的是美国“机遇号”,该航天器能够高效完成相关的航空作业任务。[1]“机遇号”是航空中使用的移动机器人的代表,它被开发出来是为了能够代替人类在外太空中完成特定的功能作业,比如收集样本、传输图像等等。
20世纪中后期,为了在航空航天领域有进一步的发展,科学家开始将移动机器人技术应用其中,使其不再仅限于人们的日常生活。图1.1显示的是美国“机遇号”,该航天器能够高效完成相关的航空作业任务。[1]“机遇号”是航空中使用的移动机器人的代表,它被开发出来是为了能够代替人类在外太空中完成特定的功能作业,比如收集样本、传输图像等等。
图1.1 美国“机遇号”
多传感器智能小车是机器人的原型,其控制系统的设计和研究可以促进智能机器人控制系统的发展。在一些发达国家,机器人制作竞赛已成为革新教育的手段。目前,在全国以及各省份举办的电子竞赛中,几乎每回都有关于多传感器智能小车相关的题目,全国的大学尤其是理工科类大学非常重视这项研究。因此多传感器智能小车具有很大的研究意义。
1.2 本课题的研究目的与意义
当前人类科技在不断发展的过程中,机器人产业也有了非常显著的进步。现在,高科技机器人已在航空航天、军事和日常生活等领域发挥着重要作用。它不仅可以完成人类无法做的危险工作,而且可以到达人类由于自身的局限性而无法到达的区域。在日常生活中的服务类机器人具有不知疲倦、按劳分配的特点。它可以减少因为劳动力成本上升而带来的一系列影响,并且能够在实际工作中大大降低人们的劳动强度,提高生活质量。
多传感器智能小车作为现代的一项新发明,会是未来的发展方向,在许多领域得到了广泛的应用。例如,在物流运输方面,智能车辆运输货物不仅可以大大提高货物运输的效率,而且有效地避免了可能的有害物质对人体的伤害。在军事领域:智能车辆可以代替士兵在核污染、生化污染等严重污染地区进行军事侦察等危险工作,从而避免人员伤亡。在道路桥梁领域,智能车辆可以开展公路自动跟踪、道路质量检测和损伤分析等工作。在水利领域,多传感器智能车可以完成对河堤、护岸堤、水库等重要基础设施的质量安全检测。此外,智能车还可用于高空消防、地震废墟中生命的探索和救援等多项工作。
因为智能车自身的可应用范畴非常广,所以很多公司以及科研机构都对智能汽车产业表现出了极大的兴趣。虽然军用和民用智能车辆的设计已经取得了很多成果,但大部分科技都依赖于某些特殊的教学条件,自身并不具备足够完善的智能车辆辨识机制,因此有必要对其进行进一步的探索。
1.3 国内外研究现状
1.3.1 国外多传感器智能车辆研究现状
全世界有关智能汽车的探索是在20世纪50年代产生的。1954年,美国开发了世界上第一个自动驾驶汽车智能系统AGVS。[2]AGV自身具有自动引导设备,能够让车辆依据既定的路线前进,它通过各种传感器收集信息,使用计算机控制器来对路线进行判断,然后带领汽车前进。人们一开始研发AGVS只是为了提升供应链的自动化运作效果并且增加工作效率。当前,AGVS科技正处于不断进步的道路中。关于AGVS的有关产业不仅仅在设备生产方面,很多另外的产业也涌现了和AGVS相关的产品。根据相关信息显示,AGVS能够很好地完成在多重条件下的信件传递工作;如果周围地面条件比较复杂,AGVS也可以进行清洁任务。AGVS技术能够促使机器人产业不断发展。[3]
随着相关技术的快速发展,智能车产业出现了全新的科研项目,并且在智能车的执行功能还有控制理论层面都有了全新的进展。相关的科研项目结果主要涵盖了:
根据美国俄亥俄州立大学的科研项目可知:该校研制出了三辆智能车,并且这几辆智能车配备有差异化的传感器,能够完成数据结合。同时,智能车的行进过程里还可以凭借视觉传感器传送的数据进行关于汽车行进路线的估算,也能够改良智能车的基本情况。
依照大阪大学有关项目科研数据可以知道:该校的重点研究目标是基于多种状况下的智能车定位。并且能够将智能车的具体位置信息以及位置改变的情况进行综合,估测未来的大致位置。
谷歌无人车:当前全球出现的车祸还有不断恶化的空气质量都导致谷歌的科研人员展开了针对无人车的科研工作;谷歌无人车可以利用激光传感器了解外部阻碍的存在以及距离,同时依赖GPS信息以及视觉传感器的信息,谷歌无人车能够明晰自身的具体位置;如果内部计算机获得了一切信息,那么这些信息就会促使无人车展开相关运动。[4]
1.3.2 国内多传感器智能车辆研究现状
国内关于智能车辆的探索从上个世纪80年代就开始了,但很多相关科学技术仍然刚起步,所以我们把智能车辆技术划分成多个模块来进行单独研究。最近20年以来,我国政府在智能机器人产业方面施加了越来越强的鼓励措施,也涌现出一大批高水平的科研人才队伍。为响应国家863计划,我国深入研发智能机器人技术并且获得了显著成就。[5]即使目前我国智能车的研究水平尚未与国际水平相持平,然而经过我国专业科研人员的长期辛勤研究得到显著成效。关键研究结果如下:
(1)我国于2003年完成首辆自主研发智能汽车的研制,是由国防科技大学和一汽集团共同完成的。[6]即使这一汽车的部分性能仍未达到发达国家的研发水平,但是整体而言已经初步发到世界级水平,可以在基本交通状况下实现加速和减速,而且实现了超车功能,为未来发展奠定了基础。
 (2)“中华牌”月球车是我国智能机器人中最为先进的研究成果,能够直接代表我国智能领域的最高科技水平。2013年,其用于执行“嫦娥三号”探月任务获得了良好的效果。“中华牌”月球车是我国航天科技研究院研究建设的,不仅能够承担导航、筛选路径的工作,同时还能够对获取的数据进行传输。具体如图1.2所示。
(2)“中华牌”月球车是我国智能机器人中最为先进的研究成果,能够直接代表我国智能领域的最高科技水平。2013年,其用于执行“嫦娥三号”探月任务获得了良好的效果。“中华牌”月球车是我国航天科技研究院研究建设的,不仅能够承担导航、筛选路径的工作,同时还能够对获取的数据进行传输。具体如图1.2所示。
图1.2 “中华牌”月球车
(3)清华大学自主研制THMR系统智能车。该系统的外部运用了GPS、超声波等多种传感器,而内部则是由1台Sun Spark、2台PC-486以及多部8098单片机构成计算机系统,整体系统运用“感知-建模-规划-执行”的演算方式完成计划路线以及操控导航。[6]
随着我国的快速发展,无论是信息化还是智能化均达到了较高水平,这意味着目前这个时期更加适宜我国智能车的技术研发。该技术具有良好的发展、运用前景,这是其能够得到全面的发展与运用的前提条件,从理论和实践两个方面深入分析并研究智能车技术具有重要价值。
1.4 本文研究内容
本篇论文中阐述的多传感器智能小车由两直流电机驱动,各种信息通过传感器采集,发送到主控单元STM32单片机对数据进行处理并完成相应的动作。该车的硬件平台为STM32F103RCT6单片机,软件平台采用Keil Vision5。
重点从下述四个方面内容进行分析研究:
(1)初步设计多传感器智能小车的整体操控系统方案,完成对各功能模块的划分;
(2)完成对各功能模块的硬件设计,包括传感器选择、电路设计等;
(3)对相关运动模块进行软件设计,通过MATLAB对PID控制进行仿真。
(4)对各功能模块进行实验,测试运行过程中系统的稳定性以及功能的完整性。
1.5 本章小结
本章节首先阐述论文选择研究课题的背景、目标以及研究价值,从其对控制技术的推动以及良好的应用前景明确了研究的重要性。然后对国内外智能车辆的研究现状以及主要成果进行了介绍,明确了本文的研究内容。
第2章 多传感器智能小车硬件设计
在专业技术持续提升的前提下,多个行业均开始运用多传感器智能小车。当面对复杂、多样的任务要求时,多传感器智能小车能够与外部不同的设备进行匹配。运用的外部硬件水平决定了多传感器智能小车的功能,同时良好的设计可以使多传感器智能小车的结构紧凑,方便整车装配。本章节依照实际需求的各项功能,针对硬件部分进行设计研究。对各个试行方案所具有的优劣势进行对比研究,最终选择最为适宜的处理方案。
2.1 多传感器智能小车控制系统方案
在多传感器智能小车系统的总体设计中,控制系统是最重要的,是整个系统的灵魂。它直接关系到整个系统的智能水平,小车的各种功能都是在控制系统的统一协调下实现。
本文设计的多传感器智能小车具备循迹、避障、红外遥控 WIFI摄像头、蓝牙控制 测距 测速 调速等一系列功能。
根据上述多传感器智能小车的功能需求,本文研究的控制系统主要包括电源模块、微控制器模块、电机驱动模块、循迹模块、避障模块、红外遥控模块、蓝牙模块等部分。
各模块功能划分如下:
(1)电源模块
负责控制系统各部分的电源供应。
(2)微控制器模块
控制系统的核心,协调系统中各功能模块完成对应的任务。
(3)电机驱动模块
负责机器人左右轮的驱动,实现左右轮的控制。
(4)循迹模块
控制小车沿地上所设定的黑线行走。
(5)避障模块
对运动过程中的障碍物进行检测,然后执行障碍物躲避的操作。
(6)红外遥控 WIFI摄像头模块
可以通过红外遥控器控制小车运行,并且通过摄像头向手机传输图像。
(7)蓝牙控制 测距、测速、调速模块
可以在手机上用蓝牙发送指令控制小车运行,完成测距、测速功能的结果显示,以及速度的控制。
2.2 电源系统设计
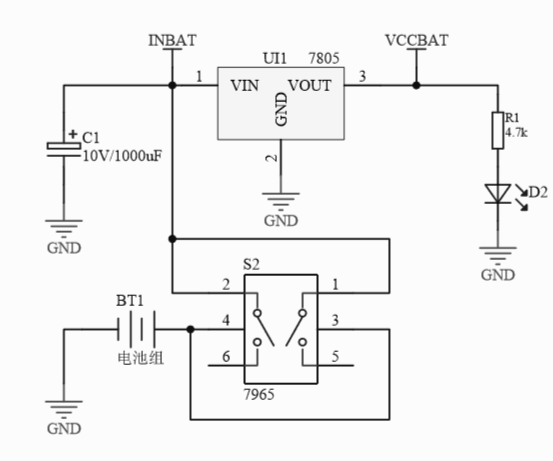 本文设计的多传感器智能小车,主要是控制电路和电机驱动电路两部分需要能耗。其中控制电路所需电源为 3.3V,电机驱动电路所需电源为 5V。故该系统选用两节3.7V的锂电池串联作为供电电源。 5V所需电压可以通过7805稳压芯片得到,其电路如图2.1所示。
本文设计的多传感器智能小车,主要是控制电路和电机驱动电路两部分需要能耗。其中控制电路所需电源为 3.3V,电机驱动电路所需电源为 5V。故该系统选用两节3.7V的锂电池串联作为供电电源。 5V所需电压可以通过7805稳压芯片得到,其电路如图2.1所示。
图2.1 5V电源电路
而主控制器STM32F103RCT6工作电压为2V-3.6V,常用为3.3V。其工作电压 3.3V是通过上述电源电路得到的 5V经正向低压降稳压器AMS1117-3.3得到的。
2.3 微控制器模块
2.3.1 主控制器选择
本系统采用STM32F103RCT6芯片作为多传感器智能小车的中央控制器,完成传感器信息收集、电机控制等任务。STM32代表ARM Cortex-M内核的32位微控制器。F代表芯片子系列。103代表增强型系列。R代表64引脚,C代表256K字节Flash,T代表LQFP封装,6代表工作温度范围为-40——85℃。 STM32F103RCT6是一种嵌入式微控制器的集成电路,同时还具有以下标准功能:2个基本定时器、4个通用定时器、2个高级定时器、2个DMA控制器、3个SPI、2个IIC、5个串口、1个USB、1个CAN、3个12位ADC、1个12位DAC、1个SDIO接口及51个通用IO口。其引脚图如图2.2所示.
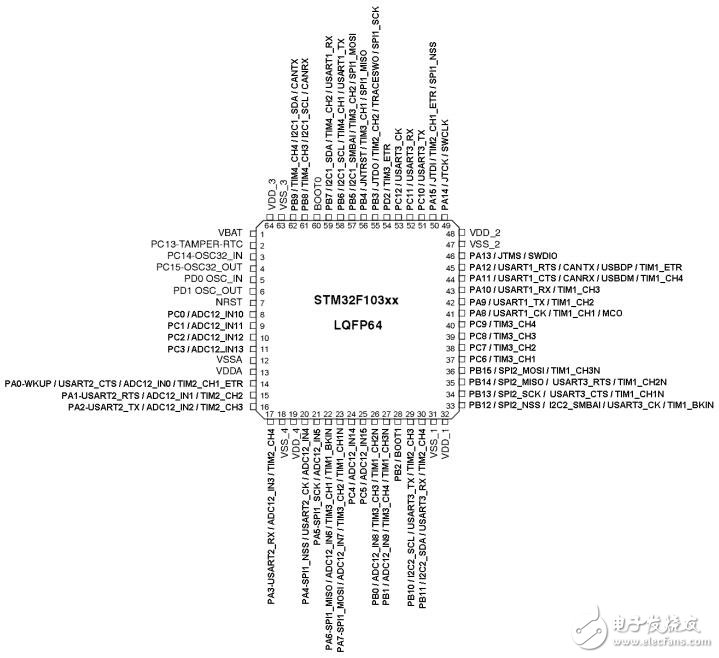 图2.2 STM32F103RCT6引脚图
图2.2 STM32F103RCT6引脚图
2.3.2 主控制器的最小系统电路
基于主控制器STM32F103RCT6的最小系统硬件电路包括电源控制电路、复位电路、晶振电路等。电路如图2.3所示。
(1)电源控制电路
STM32的工作电压为2.0-3.6V,常用3.3V。
(2)晶振电路
使用由晶体振子组成的振荡电路,也就是晶振电路,石英晶体是组成晶体振子的重要成分,能够保证振荡电路的频率处于相对较为稳定的状态。[7]本电路选用8MHZ外部晶振。
(3)复位电路
复位电路能够将电路还原至初始状态,其实际操作原理与计算器较为类似,仅在启动的方式与原理方面存在一定差别。它是整体系统中必不可少的一部分。单片机系统的复位方式有:手动按钮复位和上电复位。本文选用的是手动按钮复位。其电路如图2.4所示。
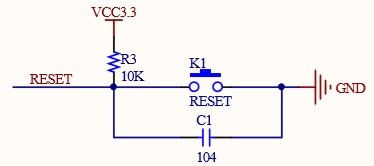
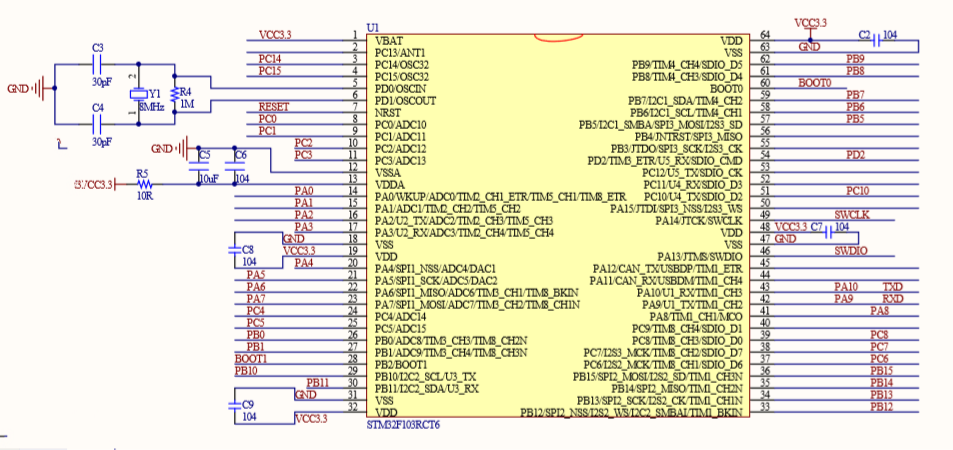 图2.3 主控制器最小系统电路
图2.3 主控制器最小系统电路
图2.4 复位电路
2.4 串口电路
串口通信是计算机和外部设备间,运用地线、控制线以及数据信号线等设施,依照数位对数据进行通讯传输。[8]随着信息技术和计算机技术的发展,多传感器智能车的发展进入了一个新的阶段。串口通信在智能车中的应用是将上位机与智能车的主控制器一对一地连接起来。运用串口电路具有下述多个方面的优点:
(1)设计较为简单,仅需要用硬件完成操作,不需要特定的系统,能够有效控制成本。
以上是毕业论文大纲或资料介绍,该课题完整毕业论文、开题报告、任务书、程序设计、图纸设计等资料请添加微信获取,微信号:bysjorg。
相关图片展示: