基于Flexterm集装箱码头交通仿真分析毕业论文
2020-02-19 14:57:13
摘 要
如今国际贸易不断增长,经济全球化的进程越来越快,港口的作用也越来越明显。频繁大量的货物装卸对自动化码头的装卸效率提出了更高的要求。自动化码头AGV的调度问题已经是影响码头作业效率的重要因素之一。本文的主要工作如下:
(1)对自动化集装箱码头系统进行分析,明确自动化码头的设备和运行规则;分析比较现行的作业线调度和全场调度,提出分群调度的概念,并针对三种调度模式建立整数规划数学模型。
(2)对离散事件系统进行分析,并研究了自动化集装箱码头的主要事件和进程;对常用的仿真工具进行简单的比较,根据本文研究对象确定了仿真的工具。
(3)提出了自动化集装箱码头建模步骤,参考上海港洋山深水港四期自动化码头的实际规模,使用Flexterm按照该步骤分模块建立具有通用性的自动化集装箱码头模型。
(4)基于通用模型,分别建立三种调度策略的仿真模型,设置仿真参数,运行模型,记录三个模型的仿真时间和AGV时间占用情况。
(5)比较三个模型的仿真时间,得出了分群调度用时最短的结论;并结合AGV时间占用情况,分析了每种调度模式的特点。
关键词:自动化集装箱码头;AGV;调度策略;分群调度;Flexterm;
Abstract
Nowadays, international trade is growing, the process of economic globalization is getting faster and faster, and the role of the port is becoming more and more obvious. Frequent and large-scale cargo handling puts higher demands on the loading and unloading efficiency of the automated terminal. The scheduling problem of the automated terminal AGV has become one of the important factors affecting the efficiency of the terminal operation. The main work of this paper is as follows:
(1) Analyze the automated container terminal system, clarify the equipment and operation rules of the automated terminal; analyze and compare the current line scheduling and full-field scheduling, propose the concept of group scheduling, and establish a mathematical model of integer programming for three scheduling modes.
(2) Analyze the discrete event system, and study the main events and processes of the automated container terminal; make a simple comparison of the commonly used simulation tools, and determine the simulation tools according to the research object.
(3) Proposed the modeling procedure of the automated container terminal. Referring to the actual scale of the fourth phase of the Shanghai Yangshan Deepwater Port Automation Terminal, Flexterm was used to establish a versatile automated container terminal model according to this step.
(4) Based on the general model, the simulation models of three scheduling strategies are established respectively, the simulation parameters are set, the model is run, and the simulation time and AGV time occupancy of the three models are recorded.
(5) Comparing the simulation time of the three models, the shortest conclusions of the group scheduling time are obtained. Combined with the AGV time occupation, the characteristics of each scheduling mode are analyzed.
Key Words:Automated container terminal;AGV;Dispatch strategy;Clustering dispatch;Flexterm;
目 录
第1章 绪论 1
1.1 研究背景与意义 1
1.2 国内外相关研究现状 2
1.3 研究内容和技术路线 3
1.3.1 研究内容 3
1.3.2 技术路线 4
第2章 AGV调度系统分析 5
2.1 自动化集装箱码头概述 5
2.2 自动化集装箱码头作业系统分析及资源配置 6
2.3 AGV调度模式分析比较 8
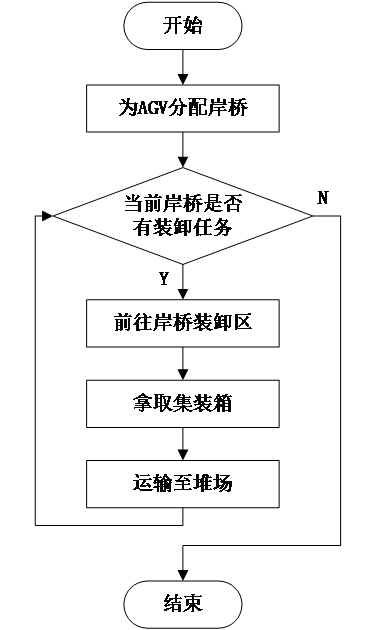
2.3.1 作业线调度 8
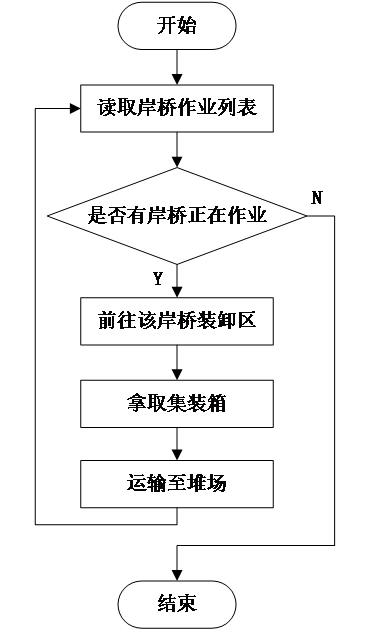
2.3.2 全场调度 9
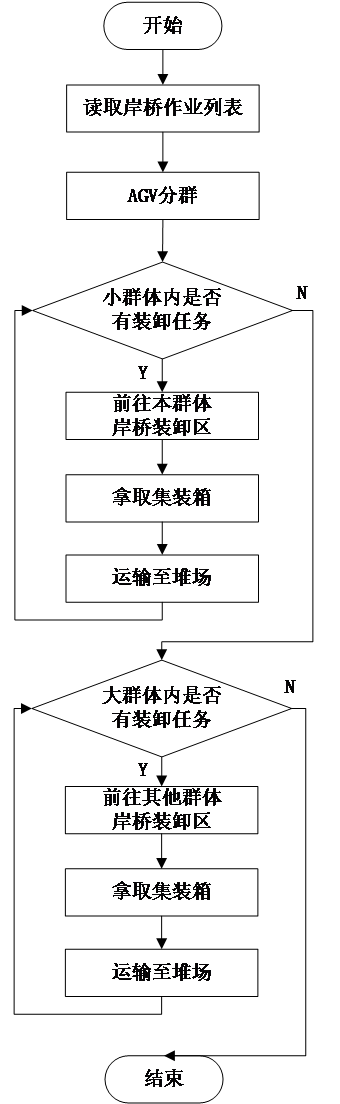
2.3.3 分群调度 11
2.4 离散事件系统建模与仿真 13
2.4.1 离散事件系统 13
2.4.2 自动化集装箱码头主要事件及进程 13
2.4.3 仿真工具的选择 14
2.5 本章小结 15
第3章 通用性自动化集装箱码头模型 16
3.1 问题描述 16
3.2 自动化集装箱码头的建模步骤 16
3.3 仿真参数设定 17
3.3.1 模型规模及主要参数设置 17
3.3.2 船期编排 18
3.4 搭建通用自动化集装箱码头仿真模型 19
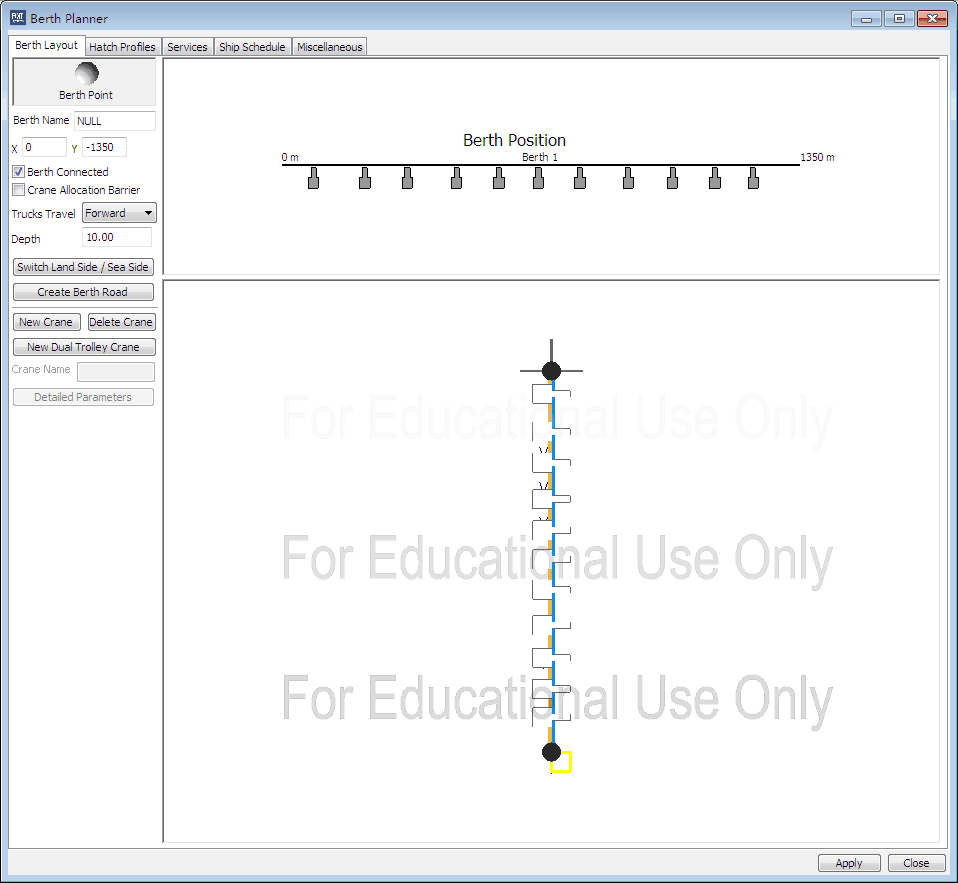
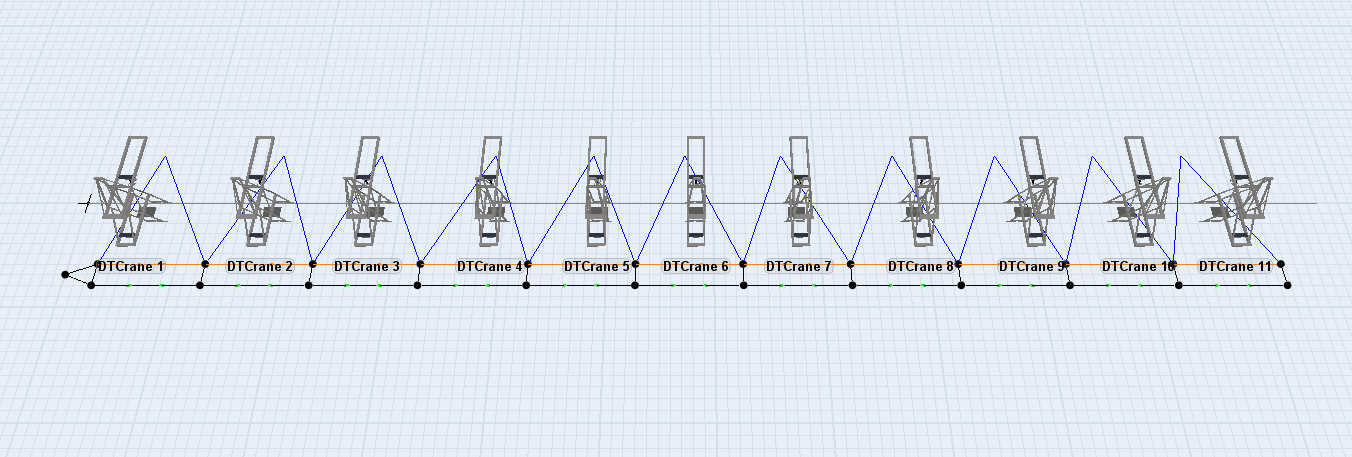
3.4.1 岸边装卸模块 19
3.4.2 水平运输模块 19
3.4.3 堆场装卸模块 20
3.4.4 船期设置 22
3.5 本章小结 24
第4章 基于Flexterm的AGV调度模式研究 25
4.1 集装箱码头AGV调度模型建立 25
4.1.1 作业线调度模式 25
4.1.2 全场调度模式 25
4.1.3 分群调度模式 26
4.2 模型运行结果及分析 27
4.3 本章小结 29
第5章 总结与展望 30
5.1 论文总结 30
5.2 研究展望 30
参考文献 31
附 录 33
附录A 分群调度算法 33
致 谢 42
第1章 绪论
1.1 研究背景与意义
在环保低碳、科技进步和规模经济的影响下,船舶大型化已经成为航运市场的发展主趋势。克拉克森统计数据显示,截至2018年11月底,1.2万TEU及以上大型船舶运力占总运力比重25.2%;预计截至今年年底,大型船舶运力将会占到总运力比重的27.8%;预计到2020年,2.4万TEU的大型集装箱船将正式参与全球远洋运输贸易。船舶大型化给港口带来的另一个问题是码头吞吐量持续增加。统计数据显示,2018年广州港吞吐量增长了7.4%,宁波舟山港吞吐量增长达到了7.1%。吞吐量的增加使码头在装卸运输方面的复杂性大大提高,因此越来越多的港口开始在自动化码头方向发力,此时对自动化码头进行分析研究就有着非常重大的意义。
激烈的竞争不仅仅体现在国际航运方面,港口的服务水平同样影响一个码头的效益。随着集装箱船舶的大型化,港口的服务水平也应有所增加,以适应大趋势的发展,提高自身效益。因此,码头的装卸作业策略和配套设施也需要对大型集装箱船做出更新升级,加快装卸速度,提高装卸效率,缩短船舶停靠时间,适应船舶大型化的趋势。
从上世纪80年代起,借着自动化技术的大力发展,一些西方国家尝试规划建设本国的自动化码头。经过30多年的发展,澳大利亚、德国、西班牙、韩国、日本、新加坡、中国等国家都有了正式投入运营的集装箱自动化码头。2017年年初,我国交通运输部印发《推进智慧交通发展行动计划(2017—2020年)》,其中一项重点任务就是推动智能化港口建设。2017年5月11日,青岛港自动化码头投入运营;2017年12月10日,上海洋山港四期码头正式开港。两大自动化码头的正式运营标志着我国港口自动化与智能化水平上升到了新的台阶。
在自动化码头投入生产运营之前,传统码头往往使用拖车来运输集装箱,不仅与码头上其它设备的衔接运行不够灵活,而且需要人工操作,调度车辆也是依靠经验或者人工来完成,存在着很大的不确定性,调度师傅的个人经验也会在很大程度上影响到一个码头的装卸效率。自动化集装箱码头则采用自动导引小车(Automatic Guided Vehicle,AGV)来完成集装箱的水平运输工作。AGV小车上安装有电磁或光学的自动引导装置,由计算机控制自动行驶。AGV具有自动导航、定位精确、无人驾驶、自动避障和路径优化等智能功能,非常适合在自动化码头中使用。与早期的车队调度不同,AGV的调度由应变力更强、更高效的“调度池”决策构架来完成,具有很大的柔性。因此,一个自动化码头的装卸效率的高低在很大程度上和AGV的调度有关。分析AGV的调度模式,提升AGV的运行效率是提高自动化集装箱码头作业效率的重要方面。
就目前来看,西方的港口管理水平仍领先于我国,相同规模的港口的吞吐能力仍高于我国,我国在现代化港口管理方面与发达国家仍有不小的差距。随着码头吞吐量的增加,码头规模、码头内集装箱数量和AGV的数量也会随之增加,AGV的运行环境也会更加复杂,这就考验AGV的调度规则能否处理复杂的场景。AGV的调度不仅仅关系到AGV,还涉及到和码头其它设备,如岸桥和场桥的联动。合理调度的同时还要考虑成本节约,时间最短,效率最高等问题。因此,AGV的调度策略是一个十分复杂的程序,也是一个非常具有研究价值的方向。
从全球航运发展史来看,自动化集装箱码头还是一个新兴产物,自动化集装箱码头的发展与建设还需要持续研究改善。由于设备众多,环节复杂,各个设备之间既独立运行又相互联系,使得使用传统的数学方法难以研究如此复杂、多变的动态离散系统。因此,仿真技术成为解决此类问题的最佳工具。仿真工具的引入使得传统数学模型难以解决的平面布局的优化、业务流程的优化、资源配置的优化等问题得以解决。而且利用仿真工具可以按照实际建立自动化码头的模型,通过恰当的设置即可再现真实自动化码头的运行效果,视觉上更加直观,可以同步考虑的因素也随之增加,能够发现一些传统数学模型中无法提现出来的问题,使得最终的效果大大提高。
1.2 国内外相关研究现状
通过研究国内外的文献,发现目前国内外对于自动化集装箱码头的研究主要集中在排队模型、装卸工艺、临时发生的应急事件和码头后方堆场的优化方面,对于AGV调度方面的研究多集中于AGV与岸桥的配比和智能AGV调度算法。
林娜青[1]等人主要是针对某港口的吞吐量、船舶在港时间和和周转时间等因素建立的排队仿真模型,通过控制变量的方式分别改变集卡到达的时间间隔和拖车的数量来研究不同参数对结果的影响。
韩晓龙[2]等人主要研究对象是港口装卸工艺,通过岸桥、集卡、场桥组成的装卸系统,研究装卸同步和先装后卸两种装卸工艺,分析集卡的作业线和作业面比较两种工艺的效率。
林晓丹[3]则是以广州港黄埔港区为例,建立港口集疏运模型,以历史数据为基础,研究港口或交通的临时变化对区域道路交通流和港口集疏运之间的关系影响。
尹立鹏[4]主要是针对三种不同的码头堆场布局设计进行仿真模拟,在各项装卸设备不变的情况下研究三种布局的装卸效率,侧重于布局设计。
张程[5]等人主要是针对某港口的吞吐量、单箱处理时间等因素建立的排队仿真模型,通过控制变量的方式分别改变集装箱的到达数量和集卡的数量来研究不同参数对结果的影响,并最终得到最优的配置情况。
陈曙权[6]首先使用Flexsim构建厦门远海自动化码头模型,分析其在平面布置和设备配置上的问题,然后对平面布置和设备配置进行优化,得出最优解。
刘梦梦[7]分析了AGV的空载时间和重载时间,使用Netlogo建立无效作业时间最的AGV调度优化模型,运用微遗传算法求解,在三种AGV与岸桥的配比中得出最优配比。
丁一[8]等人是在使用双小车岸桥且有中转平台的情况下,对后小车的作业进行时间窗约束,并建立数学模型,验证了双小车岸桥的优越性。
柯冉绚[9]等人以无效最短时间为原则,建立了AGV调度优化的数学模型,并使用Netlogo进行仿真,分析不同车道数和不同AGV岸桥配比对AGV等待时间的影响。
朱兴业[10]建立了一种新型的数学模型,并使用Netlogo进行仿真分析,分析不同的AGV岸桥配比对AGV等待率的影响,以缩短无效作业等待时间。
Kap Hwan Kim[11]等人在AGV的调度中考虑了将来作业任务的位置和时间等信息,提出了一种混合整数规划模型,并使用启发式算法求解,以降低模型求解时间。
Jinghui Tao[12]等人考虑了AGV的空载形式和位置平衡等因素,通过使用组合进化搜索功能和离散事件模拟来建立仿真模型,降低船舶服务时间,避免车辆空载行驶。
Ri Choe[13]等人提出了一种名为OnPL的基于人工神经网络的在线偏好学习算法,该算法可以实时、动态地对AGV进行调度。
1.3 研究内容和技术路线
1.3.1 研究内容
本文的研究内容主要包括:
(1)AGV调度策略研究
针对大多数码头现行的作业线调度策略和全场调度策略,分析其原理和优劣,综合两者的优点提出新的调度策略“分群调度”。并通过仿真的方式对三种调度方式进行比较。
(2)离散事件系统研究
首先明确离散事件系统的概念,接着对自动化集装箱码头的主要事件和进程进行分析,明确自动化集装箱码头就是一个复杂的离散事件系统,最后对市面上现有的仿真软件进行分析,考虑本次仿真的特点和要求,最终确定使用Flexterm进行仿真。
(3)搭建通用自动化集装箱码头模型
收集相关数据,确定仿真参数,使用Flexterm搭建通用的自动化集装箱码头模型,作为研究三种调度策略的基础模型。
(4)三种调度策略的比较研究
首先,在通用模型的基础上,针对三种调度策略的特点,使用Flexterm模拟三种调度方式,分别搭建三个模型。其次,按照既定的仿真参数分别运行三个模型,并收集运行数据。最后,通过比较仿真运行时间和AGV工作时间占比分析三种调度策略对装卸效率的影响。
1.3.2 技术路线
本文的技术路线如图1.1所示。
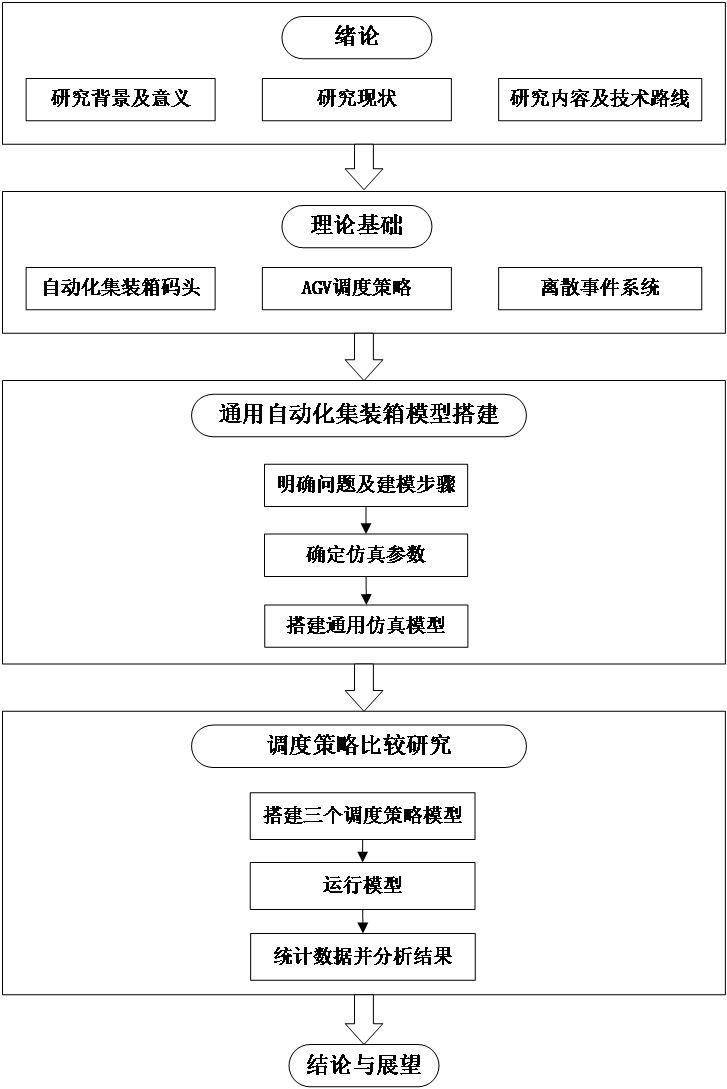
图1.1 技术路线
第2章 AGV调度系统分析
2.1 自动化集装箱码头概述
人们对于自动化集装箱码头的研究起步于30多年前。上世纪80年代,英国、日本和荷兰的部分港口率先提出建设自动化集装箱码头的规划;世界上第一个自动化集装箱码头于1993年在荷兰鹿特丹正式投入运营;中国香港则在1999年实现了基于自动化轨道吊的堆场半自动化作业。在我国大陆,2015年,厦门远海码头建成了一个全自动化泊位并投入运营;2017年,全球单体最大、综合自动化程度最高的上海港洋山深水港四期正式投入运营。
自动化集装箱码头系统大致由四个子系统构成,分别是岸边装卸系统、水平运输系统、箱区装卸系统和集疏运系统[14]。其中,岸边装卸系统的主要功能是在船舶到港后,使用自动化岸桥进行集装箱的装卸作业;水平运输系统主要功能是通过AGV完成集装箱在往来岸边与堆场之间的水平运输作业;箱区装卸系统的主要功能是负责集装箱在进出堆场时的装卸作业和在箱区内部整理作业的功能;集疏运系统则主要通过外卡实现集装箱进出堆场和进出码头的作业,与码头外部进行交互。这四个子系统紧密联系、环环相扣,共同构成自动化集装箱码头整体系统。自动化集装箱码头整体构成如图2.1所示。
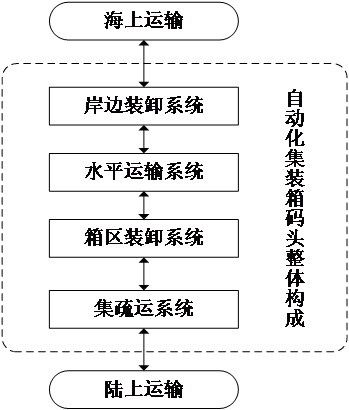
图2.1 自动化集装箱码头整体构成
2.2 自动化集装箱码头作业系统分析及资源配置
自动化集装箱码头和常规集装箱码头的区别之一就是自动化码头采用的是自动化运行的装卸运输设备,而这些设备主要来自于岸边装卸系统、水平运输系统和箱区装卸系统,因此下面将主要介绍这三个系统中的装卸运输设备。
(1)自动化岸桥
岸边轨道式龙门起重机,简称岸桥,是岸边装卸系统中最核心的角色,主要用于船舶的岸边装卸作业。一台自动化岸桥的费用十分昂贵,加之岸桥本身体积庞大,移动速度慢,因此岸桥的布置和选型是码头作业效率的关键影响因素之一。自动化集装箱码头常用的是双小车岸桥,相比于单小车岸桥,双小车岸桥则是在岸桥上的中转平台完成集装箱的拆装转锁作业。自动化岸桥示意图如图2.2所示。
 图2.2 自动化岸桥示意图
图2.2 自动化岸桥示意图
(2)水平运输设备
自动化集装箱码头水平运输设备主要有两种:一种是采用AGV作为水平运输设备;另一种则采用人工驾驶的跨运车。目前全球最大的自动化集装箱码头——上海洋山港四期自动化码头采用的就是上海振华重工研制的AGV,除了常规AGV拥有的特点以外,还拥有故障诊断、电量监控等智能化功能。如图2.3所示为洋山港四期自动化码头投入使用的AGV。
 图2.3 洋山港四期自动化码头中的AGV
图2.3 洋山港四期自动化码头中的AGV
以上是毕业论文大纲或资料介绍,该课题完整毕业论文、开题报告、任务书、程序设计、图纸设计等资料请添加微信获取,微信号:bysjorg。
相关图片展示: