基于二维SLAM的移动机器人导航与自主避障技术研究毕业论文
2020-02-19 14:54:56
摘 要
随着智能机器人技术的发展,智能机器人在生活中得到了更加广泛的应用,其中移动机器人的导航与避障技术成为社会关注的热点。以本文中涉及到的智能仓库为例,移动机器人在库存区内代替人类完成大量重复性、复杂性、危险性的活动,极大的节省了人力与物力。但是实际的仓库环境动态多变,为了使移动机器人更好的服务于人类生活对其导航与避障技术的研究显得尤为重要。
本文拟构建一个智能仓库的基本模型,在预先设计的仓库内进行移动机器人的全局路径规划,并在此基础上考虑到行人、货物掉落、机器人间碰撞等突发状况所引起的动态障碍的影响,实现仓库环境下的局部路径规划。在研究算法时,首先基于Python仿真模拟A*算法以及人工势场算法(APF),对比两种算法在智能仓库内进行路径规划的优缺点;然后在MATLAB的仿真系统中实现对A*算法和APF的仿真模拟,其中为了更加贴合实际,在APF仿真模型加入了3台移动机器人来模拟多机器人路径规划。最终在全局规划的基础上逐步实现了动态的、多机器人协作式的智能仓库的建立。
关键词:A*算法、APF、智能仓库
Abstract
With the development of intelligent robot technology, intelligent robots have been more widely used in life, the navigation and obstacle avoidance technology of mobile robots has become a hot spot of social concern. Taking the intelligent warehouse involved in this article as an example, the mobile robot replaces human beings in the inventory area to complete a large number of repetitive, complex, and dangerous activities, which greatly saves manpower and material resources. However, the actual warehouse environment is dynamic and changeable. In order to make mobile robots better serve human life, research on navigation and obstacle avoidance technology is particularly important.
This paper intends to construct a basic model of intelligent warehouse, and carry out global path planning of mobile robots in pre-designed warehouses, then on this basis, consider the influence of dynamic obstacles caused by sudden situations such as pedestrians, goods falling, and collisions between robots to realize local path planning in the warehouse environment. In the research of the algorithm, firstly simulate A* algorithm and artificial potential field algorithm (APF) based on Python simulation, compare the advantages and disadvantages of the two algorithms in the intelligent warehouse path planning; then implement the A* algorithm and APF in the simulation system of MATLAB, in order to be more realistic, three mobile robots were added to the APF simulation model to simulate multi-robot path planning. Finally, on the basis of global planning, the establishment of a dynamic, multi-robot collaborative intelligent warehouse is gradually realized.
Keywords: A* algorithm、APF、Intelligent warehouse
目录
摘要 I
Abstract II
第1章 绪论 1
1.1 研究背景 1
1.2 研究目的及意义 1
1.3 国内外研究现状 2
1.3.1 传统避障算法 2
1.3.2 智能避障算法 3
1.3.3 传统避障算法与智能避障算法比较 5
1.4 研究内容与章节安排 5
第2章 智能仓库的布局与设计 6
2.1 智能仓库的工作环境介绍 6
2.2 智能仓库的结构 6
2.2.1 智能仓库布局 6
2.2.2 工作环境描述 7
2.2.3 智能仓库中障碍物描述 7
2.3 智能仓库多机器人系统 8
2.3.1 机器人系统控制体系结构 8
2.3.2 机器人的主要构成 9
2.4 多机器人路径规划的问题描述 11
2.5 本章小结 11
第3章 路径规划算法设计与应用 13
3.1 A*算法的研究 13
3.1.1 算法的估计函数 13
3.1.2 A*算法步骤及执行 14
3.1.3 A*算法的问题改进与运行 15
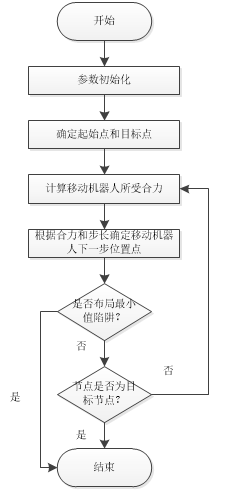
3.2 人工势场法的研究 18
3.2.1 算法的估计函数 19
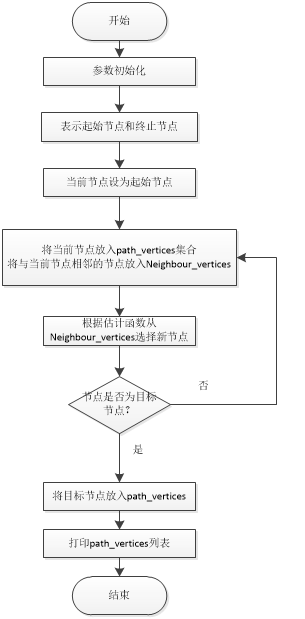
3.2.2 算法的步骤 20
3.2.3 算法的运行与分析 21
3.3 本章小结 22
第4章 多机器人系统仿真及结果分析 23
4.1 A*算法的仿真 23
4.1.1 仿真系统构建 23
4.1.2 仿真条件设置及规定 24
4.1.3 仿真结果与分析 24
4.2 APF的仿真 26
4.2.1 仿真系统构建 26
4.2.2 仿真条件设置及规定 27
4.2.3 仿真问题的解决方案 29
4.2.4 仿真结果与分析 32
4.3 本章小结 35
第5章 经济与效益分析 36
第6章 总结与展望 37
参考文献 39
致谢 41
第1章 绪论
1.1 研究背景
智能机器人是人工智能时代的一大特征,在科技飞速发展的今天,机器人的导航与避障技术是一项融合了多学科的全新的技术,象征着科学技术的最新进展,已成为世界各国科研关注的重点。机器人避障技术的发展有助于科技进步以及人类生活水平的提高,因此世界各国也都投入了大量的人力物力推动机器人技术的不断发展。
当今移动机器人向着智能化的方向发展,但是由于技术等问题的限制,目前移动机器人领域无法取得突破性进展。例如,为了获取环境信息使移动机器人进行定位时对传感器等硬件要求较高、为了实现高效避障要求移动机器人的避障算法不断创新以适应多变的环境等等。上述问题都是移动机器人避障领域亟待解决的问题,为了突破以上阻碍,使移动机器人更好的应用在生活中的各个领域,服务更多的人,对该领域进行研究显得尤为重要[1]。
1.2 研究目的及意义
目前移动机器人的使用上依然存在许多的问题,随着科技的发展传感器等硬件的灵敏度逐渐提高,各种传统避障算法也不断更新,但是环境的复杂性也在不断增加,人们渴望移动机器人能够应用到更多的领域时就需要不断的更新算法,增加算法的普适性与精准性,同时各种硬件设备的可靠性、准确性、安全性等也是关注的重中之重。移动机器人的三维避障研究也是一大难题,大多基于二维的仿真算法都可以很好的运行,但是考虑到实际环境并不是简单的二维拉伸,其中各种不规则的三维立体是移动机器人避障有待解决的一大难题[2]。
随着科学技术的发展进步,人们需要移动机器人代替人类去完成具有高难度和高复杂性的危险工作,最大程度降低人的劳动强度、提高社会生产效率。目前,机器人对社会治安、工业生产、社会服务等各个行业都有很大的帮助。例如,避障的研究有助于无人驾驶技术的发展与成熟;军事机器人可以凭借该技术应对更加复杂的环境,有助于军队只能侦查与作战;还可以用于消防安全、灾难救险等领域,移动机器人可以应用于医疗救援、抗震救灾等危险工作中以减少人员伤亡机器人。
1.3 国内外研究现状
在机器人避障领域,国外进行研究的时间比国内早,所取得的成效也比国内要大。智能避障是指移动机器人通过传感器检测到障碍物的位置获取环境信息,构建出模拟地图然后根据固定的算法进行的路径规划,从而避开障碍物到达目的地。如何让增加移动机器人的传感器灵敏度使其判断障碍物更加准确、如何优化改进路径规划算法、如何准确快速构建环境地图等等,这些都是如今移动机器人避障领域需要突破的问题。
本论文的主要任务是结合本专业所学习物流知识,设计出一个智能仓库系统,其中包括仓库占地面积、初期仓库的货架货物摆放的设计、道路的铺设等布局问题,以及智能机器人移动路径的规划和机器人对紧急情况的处理(货物掉落、工作人员、路面施工等等)即自主避障。为了实现上述系统的设计,要学习机器人的SLAM技术,选定技术路线后,根据仓库模型编写出路径规划的算法,建立机器人的运动模型,然后在MATLAB或其他仿真软件中进行仿真运行。
目前移动机器人的避障问题分为2类:1、周围环境信息已知,例如本文所描述的智能仓库,在此情况下移动机器人的避障相对简单;2、周围环境信息未知,在此情况下的移动机器人需要先获取周围环境信息,进行地图模型构建确定自身位置坐标然后利用算法进行路径规划[3],在此情况下的机器人避障十分复杂。在现实生活中,移动机器人所处环境信息是动态的、未知的,需要移动机器人进行局部路径规划,此时传统避障算法无法很好的应用到实际中,必须根据实际情况进行改进。
1.3.1 传统避障算法
(1)人工势场法
人工势场法于20世纪80年代由Khatib O等人[4]提出,人工势场法的核心是将移动机器人的运动模拟成质点在势场力作用下的移动,目标点对移动机器人产生“引力”,障碍物对移动机器人产生“斥力”,然后通过二者合力引导移动机器人躲避障碍物并到达目标点,因此规划出来的路径比较平滑并且安全,但是这种方法存在目标不可达、局部最小值问题。
Huang Y 等人[5]提出了带记忆功能的摸墙算法解决了传统算法的局部最小值问题,方法类似于迷宫搜索中的摸墙算法思路。徐飞[6]提出了一种基于相对速度的改进人工势场法,提出了设置中间目标点使移动机器人在局部最小点处受到一个外力,借此解决传统APF中的局部最小值问题。
(2)栅格法
Borenstein J 和 Koren Y[7]提出了栅格法来实现机器人避障,使用该算法进行路径规划时,栅格的尺寸是要考虑的必要因素。栅格较小会使栅格地图所表示的环境信息更加清晰,使算法运行的更加精准,但是相应的储存信息也会增多会增大内存,同时鲁棒性会减弱抗干扰能力变弱,规划速度会相应降低使得实时性得不到保证;当栅格选取较大时,由于信息存储量少,使得算法的鲁棒性增强,响应速度随之增快,但是对环境信息的模拟精度降低将会导致路径规划定位不准确。
于红斌等人提出了基于栅格法的机器人路径快速规划[8],为每次可行路径经过的节点之间增加一个记忆量,并通过由该量作用的关联程度做反馈来搜索可行的路径[9]。
(3)A*算法
尼尔森等人在1980年提出了 A* 算法[10],A*算法是全局路径规划中求解最短路径最有效的搜索方法。A*算法的核心是估计函数,利用估计函数移动机器人可以确保每一步都是最优决策,最终能够快速准确的找到一条距离最短的最优路径。A* 算法在诸如仓库等已知环境中运行时,不仅搜索速度快而且能够找到最短路径;但是A*算法不适合在动态多变的环境中进行路径规划,环境复杂性的增大将极大的降低A*算法的运行效率[11]。
1.3.2 智能避障算法
单一的传统避障算法只能在环境已知的情况下进行全局规划,在未知或者部分已知的环境中存在着较为明显的缺陷路径规划效果较差。智能避障算法能够克服传统算法的缺陷,增加移动机器人的灵活性以及智能性,使机器人即使在动态未知的环境中也能有效躲避障碍物。
(1)基于神经网络的机器人避障方法
Glasius, R[12]采用Hopfield神经网络,在仿真系统中模拟神经元使移动机器人进行路径规划, Chohra, A[13]不仅过使用神经网络进行避障,并在仿真系统中加入混合智能系统(HIS),将二者相联从而使移动机器人像人类一样拥有认知和决策避障的能力。
齐方远在神经网络避障方法的基础上使移动机器人能够获取环境中的距离信息,其研究的移动机器人利用GPS进行定位,使用神经网络避障算法的思路进行路径规划,很好的结合了两种新技术并取得了良好的模拟效果。在其建立的仿真模型中,移动机器人在室外环境可以很好的完成避障任务,并且移动机器人的自主决策与运动能力较强[14]。
(2)基于BPF的移动机器人避障方法
Oscar Montiel[15]等人使用一种新的路径规划方法计算移动机器人的静态和动态障碍环境中的最佳路径。所提出的方法称为细菌势场(BPF),确保了可行、最佳和安全的路径。该新颖的提议利用人工势场(APF)方法和细菌进化算法(BEA)来获得增强的灵活路径规划方法,该方法具有使用APF方法的所有优点,大大减少了其缺点。针对经典APF方法,以及伪细菌势场(PBPF)方法和遗传势场(GPF)方法的BPF方法的顺序和并行实现的对比实验,所有这些都基于进化计算,实现了优化APF参数。设计了一个使用MR真实模型的仿真平台来测试路径规划算法。一般而言,已经证明BPF通过减少计算时间来寻找最佳路径至少1.59倍,从而优于APF,GPF和PBPF方法。 这些结果对BPF路径规划方法在动态复杂环境中满足局部和全局可控性的能力产生积极影响,避免与干扰MR导航的对象发生碰撞。
表1-1 传统避障算法与智能避障算法性能比较
传统避障算 法 | 栅格法 | 栅格大小决定算法的性能 |
A*算法 | 不适用于动态、复杂环境 | |
人工势场法 | 存在局部最小值和目标不可达问题 | |
智能避障算法 | 神经网络算法 | 容错能力强,适用于未知的、动态的环境 |
遗传算法 | 采用群体方式对目标函数空间进行多线索的并行搜索,不会陷入局部极小点 | |
模糊控制算法 | 通过人的经验和决策进行相应的模糊逻辑推理,并且用具有模糊性的语言来描述整个时变的控制过程 |
1.3.3 传统避障算法与智能避障算法比较
传统避障算法提出时间较早,适应环境有限具有局限性,智能避障算法是在传统算法的基础上结合新技术发展而来可以更好的适应动态变化的环境。部分传统避障算法与智能避障算法性能对比如表1-1所示
1.4 研究内容与章节安排
本文主要对移动机器人在智能仓库中的避障问题进行研究,首先通过考察、查阅资料建立智能仓库的布局框架,然后选择使用的路径规划算法,即:A*算法、D*算法、人工势场法。考虑仓库中的两种情况:1、正常工作时,不存在不确定性障碍物;2、仓库中存在行人、掉落货物、其他移动机器人等不确定的移动障碍物。比较算法在不同的仓库工作环境中的运行结果,得出各算法的异同点及适用环境,最终通过仿真还原移动机器人在仓库中工作的完整情形。具体章节安排如下:
第1章主要介绍了移动机器人路径规划问题的研究背景以及国内外研究现状,同时列出几组具有代表性的路径规划算法并比较算法的优缺点。
第2章主要描述智能仓库的整体布局,介绍其内部的工作环境以及移动机器人的主要构成和控制方式。
第3章设计并应用了2种算法:A*算法、人工势场算法,并且通过Python编程实现了对算法功能的验证,最后通过比较得出算法之间的异同点和各自的适用环境。
第4章对上一章研究过的A*算法和人工势场法进行仿真模拟,利用MATLAB将算法在智能仓库中的工作情形模拟出来。
第5章对整篇论文的内容进行归纳总结,并就以后的研究方向提出了展望。
第2章 智能仓库的布局与设计
2.1 智能仓库的工作环境介绍
智能仓库是物流活动中极其重要的一个环节,起到储存保管货物的作用,同时能够创造出时间价值和空间价值。结合现代化技术手段的智能仓库保证了货物管理各个环节中数据输入的准确性和时效性,保证用户可以第一时间掌握到智能仓库内的库存情况信息进而合理有效的安排库存作业和生产、采购计划,智能化的机械设备的应用在很大程度上节省了人力,解放生产力提高仓库作业效率。通过合理的编写代码,可以是智能仓库应用于特定的场景中便于用户对货物的批量、质量、生产日期等进行管理。智能仓库主要包括如下几种设备:控制系统、货架、传送带、智能移动机器人等,仓库中的作业主要通过移动机器人完成,其工作流程为移动机器人的工作流程为1、接收控制系统分配的任务2、接受任务后通过路径规划算法在指定的目标点之间进行货物搬运3、完成所有任务后返回起始点等待新的任务指令[16]。
2.2 智能仓库的结构
2.2.1 智能仓库布局
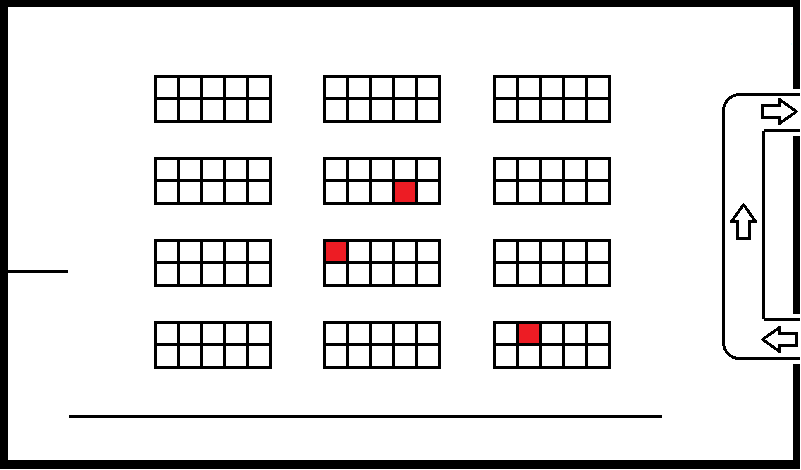
图2.1 智能仓库布局简图
以上是毕业论文大纲或资料介绍,该课题完整毕业论文、开题报告、任务书、程序设计、图纸设计等资料请添加微信获取,微信号:bysjorg。
相关图片展示: