机器人关节智能控制器设计毕业论文
2020-02-18 11:57:27
摘 要
在机器人关节驱动器设计中,传统的设计思路是通过提升刚度来提升驱动器的稳定性、精度等性能。但由于仿生机器人所面对的复杂外部环境,引入弹性元件可以为关节在低阻抗时带来更高的输出能量密度,同时弹性关节的柔顺性还可以提供与外部环境交互时的缓冲与能量密度。基于这样的特点,在仿生机器人关节中使用串联弹性驱动器具有很强的现实应用意义。同时引入的弹性元件将关节力矩控制转变为元件形变位置控制,为控制器设计带来了新的思路。
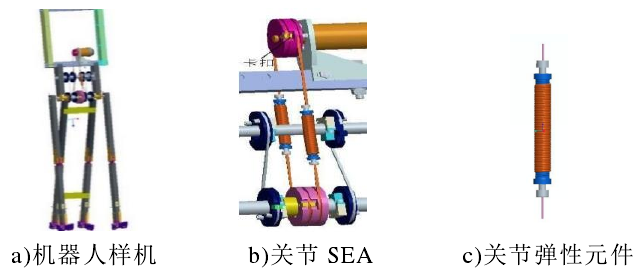
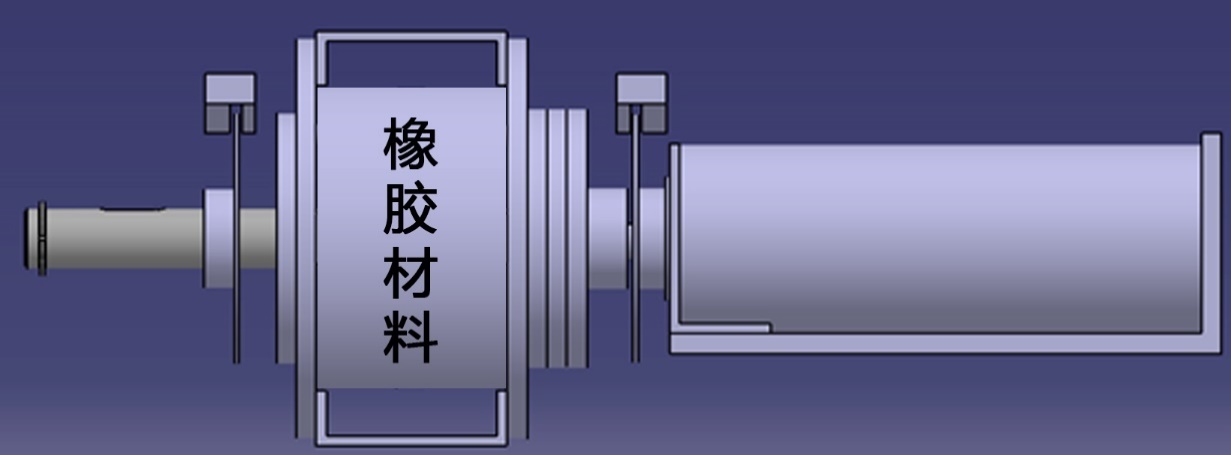
本文首先在参考已有的SEA设计方法后设计了一种使用橡胶弹性元件的单关节旋转型串联弹性驱动器。并对该驱动器进行了动态模型建立。然后基于动态模型建立机器人关节智能控制器。
在理论设计基础上进行了单关节SEA控制系统软硬件实验平台的搭建。使用STM32单片机为主控板,控制程序使用PID控制算法。通过经验试凑法获得PID参数后进行基于位置控制的力矩控制实验,并对采样数据进行分析,验证控制器设计的合理性与有效性。
关键词:仿生机器人关节、串联弹性作动器、PID控制算法、力矩控制
Abstract
In the robot joint drive design, the traditional design idea is to improve the stability and accuracy of the drive by increasing the stiffness. However, due to the complex external environment faced by the bionic robot, the introduction of elastic elements can bring higher output energy density to the joint at low impedance, and the flexibility of the elastic joint can also provide buffer and energy density when interacting with the external environment. Based on such characteristics, the use of a series elastic actuator in a bionic robot joint has a strong practical application significance. At the same time, the introduction of the elastic component transforms the joint torque control into the component deformation position control, which brings a new idea to the controller design.
In this paper, a single-joint rotary series elastic actuator using rubber elastic components is designed with reference to the existing SEA design method. And the dynamic model of the drive is built. The robot joint intelligent controller is then built based on the dynamic model.
Based on the theoretical design, the software and hardware experimental platform of the single joint SEA control system was built. The STM32 MCU is used as the main control board, and the control program uses the PID control algorithm. The torque control experiment based on position control is obtained after the PID parameters are obtained by empirical trial and error method, and the sampling data is analyzed to verify the rationality and effectiveness of the controller design.
Keywords:Bionic robot joint, series elastic actuator, PID control algorithm, torque control
目 录
目 录 1
第1章 绪论 1
1.1 选题来源及意义 1
1.2 国内外研究现状 2
1.2.1 串联弹性驱动器研究现状 2
1.2.2 SEA在足式机器人中应用现状 6
1.3 本文的研究内容及结构安排 8
1.4 本章小结 9
第2章 单关节SEA结构设计及建模 10
2.1 引言 10
2.2 传统驱动方法与串联弹性驱动器对比 10
2.3 串联弹性驱动器结构设计 11
2.4 串联弹性驱动器模型建立 12
2.5 本章小结 13
第3章 机器人关节控制器设计 14
3.1 引言 14
3.2 电机控制 14
3.2.1 直流无刷电机转速、电流双闭环控制系统 14
3.2.2 电流控制器设计 15
3.2.3 速度控制器设计 16
3.2.4 位置控制器设计 16
3.2.5 转速、电流、位置调节器在三环位置伺服控制系统中的作用 18
3.3 基于SEA的力矩控制 18
3.4 本章小结 19
第4章 单关节SEA控制系统软硬件平台设计与搭建 20
4.1 引言 20
4.2 单关节SEA控制系统硬件平台搭建 20
4.2.1 光电编码器 20
4.2.2 STM32主控板 21
4.2.3 电机驱动器 22
4.2.4 控制系统电源 23
4.3 基于STM32的软件平台设计 24
4.4 本章小结 25
第5章 机器人关节力矩伺服控制实验 26
5.1 引言 26
5.2 实验目的、原理及平台介绍 26
5.3 实验内容及结果分析 27
5.3.1 控制器PID参数整定 27
5.3.2 单关节SEA力矩控制实验过程及结果分析 28
5.4 本章小结 30
第6章 总结与展望 31
6.1 总结 31
6.2 展望 31
参考文献 32
致谢 34
绪论
选题来源及意义
谈到20世纪的重大发明,机器人一定是第一个被提起的。在过去的50年里,机器人技术得到了迅速的发展并取得了长足的进步,同时也大量应用到了人们的生活中。正是凭借着机器人技术不断地改进与创新,人类可以不再为重复的无意义工作而苦恼,这种促进作用在工业领域表现得尤为显著。作为一个最具有创新能力的科学技术领域,机器人技术已经实现了高水平的决策,执行和感知。机器人不仅创造了重要意义在教育,医药和工业领域,还可以促进服务,娱乐和军事领域的工业发展和战略创新。随着时间推延,机器人技术将会得到进一步发展,机器人的覆盖率,应用面将会得到进一步增加,会有更多的机器人参与到人类社会的服务之中。
近年来,波士顿动力公司推出了许多高性能仿生机器人,如大狗和阿特拉斯等。 其惊艳的运动性能为我们展示了仿生足式机器人在场景应用上的卓越潜力。也让国内外进一步拓展了对于仿生足式机器人的研究范围。
当足式步行机器人与环境接触时,它是一种静不定的足部反应系统。 因此,足式机器人想要在陌生环境中得到良好运动表现的基础是足部机器人关节驱动力的计划和控制。选择适当的算法规划关节驱动器,准确控制关节力矩才能实现足式机器人在陌生环境中的良好运动表现。
在关节力伺服驱动器方面,减速器虽然可以增加电机强度和能量密度,但也会增加发动机输出阻抗,增加输出阻抗意味着也增加里电机控制力动态建模的非线性与困难程度,这使我们很难实现电机驱动输出的精确控制。如果使用液压缸类型驱动器,本身具有很高的输出阻抗同时,还具有着液压缸带来的摩擦,漏液等问题,同样无法对液压缸驱动器实现精确的输出控制。传统的做法是使作动器和其负载之间的界面尽可能地坚硬。但是可以看到降低界面刚度具有许多优点,包括更高的抗冲击性,更低的反射惯性,更精确和稳定的力控制,更少的环境破坏以及储能能力,不过降低界面刚度也会降低零运动力带宽。但对于足式机器人面对的自然环境内任务,零运动力带宽并非一切,将系列弹性作为致动器中的有目的元素并入是一个很好的解决办法。在这里使用术语弹性而不是顺应性来表示存在于执行器中的被动机械弹簧。
串联弹性作动器即Series Elastic Actuators,简写为SEA。与传统的刚性机器结构相比,SEA由于弹性元件的存在可以减少与环境力之间的相互冲击,避免出现急剧变化的力响应信号,便于实现对于关节驱动力的精确控制。另一方面,仿生学角度而言,人类的足部关节是肌肉-肌腱结构,肌腱就可以看作为弹性元件,因此引入被动弹性元件的SEA也具有着仿生特性。此外,引入弹性元件也可以降低驱动器的输出阻抗,增加系统的柔性。SEA作为一种仿生柔性驱动器可以在保证输出驱动力和和能量密度的同时具有相对低的输出阻抗,凭借这种特性,SEA可以应用于足式机器人,医疗康复等领域中。
因此,本课题旨在设计一种基于STM32的机器人柔顺关节控制器,通过引入SEA及研究不同控制方法使机器人关节具有更好的交互性能。
国内外研究现状
- 串联弹性驱动器研究现状
早在70年代末,麻省理工大学的Raibert等学者就开始对弹跳机器人进行研究[1],早期他们选用的是气动驱动技术,凭借着气体本身的特性可压缩性,可以在弹跳落地时存储一定的冲击能,同时也可以对弹跳机器人予以缓冲与保护。所以,目前有许多学者致力于研制气动人工肌肉,如已经被大量应用的McKibben气动人工肌肉[2]。但气动驱动技术也有着自己的问题,首先是较低的输出能量密度,其次还拥有着不便于与弹跳机器人实现一体化的巨大体积。Raibert在后期的研究中开始关注于通过液压弹性驱动器来实现机器人弹跳控制。到1980年初期,MIT的Pratt学者开始研究SEA在步行机器人中的驱动应用[3],其结构为在电机等驱动源上加入串联弹性装置,以实现精确控制的驱动强度,这套装置可以在能量密度较高,输出力较稳定的前提下实现体积与阻抗较小,还可以缓冲外部陌生环境带来的冲击。
应用在步行机器人中时,SEA相比于传统驱动装置具有一系列优点。近几年来,SEA的研究愈发深入,也广泛应用在不同种类的机器人中,如医疗康复辅助设备,复杂环境下步行机器人等。
直线型与旋转型是目前常见的两种SEA结构,直线型有电机与液压等驱动配置丝杠螺母与弹簧传动等形式;旋转型则一般为扭簧配合电机驱动。
(1)直线型SEA
直线型串联弹性作动器在液压驱动情况下更为优异。SEA的雏形来自于1986年Marc Raibert教授研制的单腿跳跃机器人(如图 1‑1),其腿部应用的汽缸能够近似地看作一个弹性作动器,M.H. Rabiert为此撰述了《Legged Robots That Balance》[1]一书来详细介绍如何运行和平衡单腿机器人,包括分析,建模和实验。MIT 的 Pratt 和Williamson 首次将弹性装置与步行机器人的电机或液压驱动串联[3],构建了串联弹性作动器概念(如图 1‑2)。这种驱动方法可以实现关节的柔顺控制与力的精确控制。
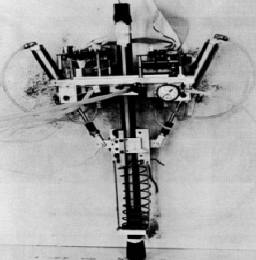

图 1‑1 Raibert单腿跳跃模型 图 1‑2 串联弹性驱动器
Hollander提出了一种作为机器人肌腱的并联弹性作动器[4],如图 1‑3。与其人体模拟类似,机器人肌腱利用其固有的弹性性质来降低其电机的峰值功率和能量需求。该并联弹性驱动器内部由三个SEA组成。
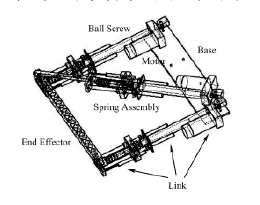
图 1‑3 3SEA驱动器
Migliore设计了一款包含两个电机驱动的驱动器[5],如图 1‑4。在其输出端上串联了弹簧元件,可以用来传递两个不同转速电机间扭矩,通过该装置实现了良好的柔顺性及末端变刚度的效果。
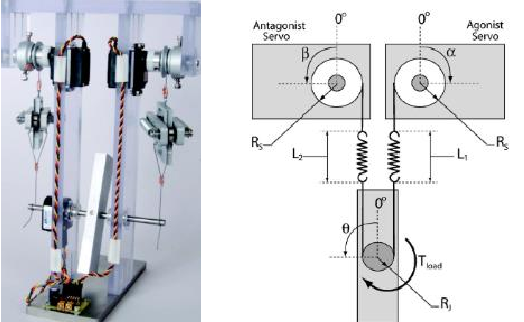
图 1‑4 两电机驱动SEA
Sardellitti等学者串联两个弹簧原件,通过调整受力点改变力臂来实现输出末端变刚度效果[6],如图 1‑5。
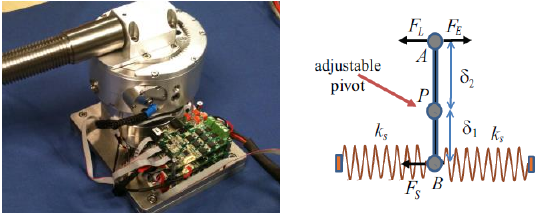
图 1‑5 调整受力点实现变刚度
哈尔滨工程大学马洪文等构造了一种伺服电机配置两组线性弹簧的串联弹性驱动器,实物如图 1‑6,可以更好地模拟生物体肌肉的变刚度特性[7]。

图 1‑6 双串联弹性驱动器实物
江苏大学韩亚丽等提出了一种丝杠螺母串联弹簧配置在电机驱动上的串联弹性驱动器,结合相应刹车片可以实现膝关节外骨骼在不同行走模式下驱动[8],实物如图 1‑7。

图 1‑7 丝杠螺母SEA
(2)旋转型SEA
俄亥俄州立大学的Curran和Orin在弹跳机器人中使用了一款通过钢丝传递电机扭矩的旋转型弹性制动器[9],Veneman使用伺服电机,软钢线缆传动装置和基于系列弹性元件的力反馈回路组成旋转与直线均有的串联弹性驱动器[10],如图 1‑8。
Wyeth通过在旋转盘内放置压缩弹簧实现了一种旋转型SEA[12],该SEA有四个初始拥有一定压缩量的直线弹簧,电机输出从驱动内壳通过直线弹簧传动至外壳。驱动内壳与驱动外壳发生相对转动时,放置在旋转盘内的直线弹簧同时产生弯曲变形与直线变形,如图 1‑9。
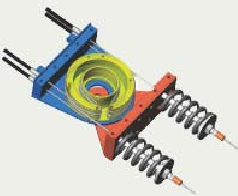
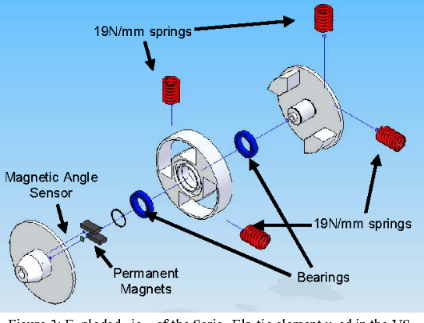
图 1‑8 联合驱动型SEA 图 1‑9 四弹簧旋转型SEA
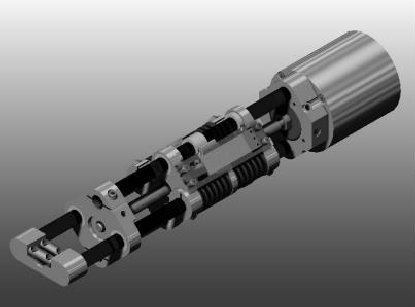
Joonbum Bae设计了一款将扭力弹簧放置于直流电机驱动中间轴上的扭力弹簧锥齿轮SEA[12],控制扭力弹簧的转角就可以精确的控制力的输出,但同时锥齿轮的间隙和摩擦带来了震荡,降低了系统稳定性与跟踪性能实物如图 1‑10。
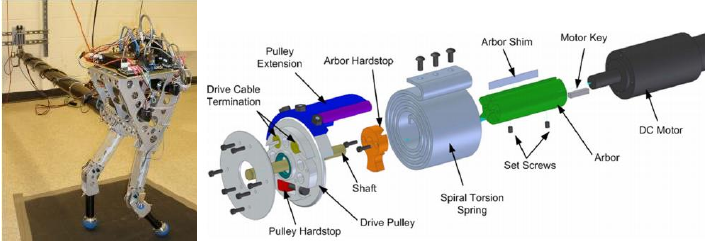
K.Kong等人提出了一款紧凑旋转型多齿轮传动SEA[13],如图1-11。这款SEA的弹性元件为涡旋弹簧,通过涡轮涡杆与电机驱动相连,多处齿轮且涡旋弹簧不与电机输出直接串联导致该SEA存在一定力噪声。
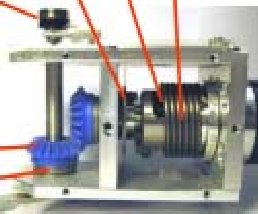
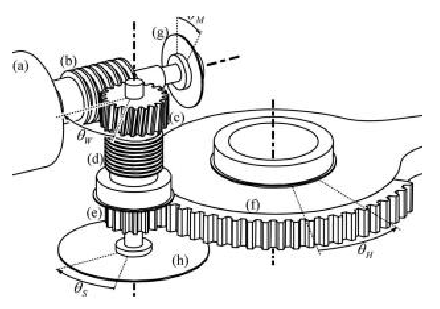
图 1‑10 扭簧SEA 图 1‑11 紧凑的齿轮传动SEA
Giorgio Carpino等人重点改进了串联弹性驱动器中的弹性元件[14],设计方法采用有限元,设计了一款双重螺旋的盘型弹性元件,拥有质量轻,结构紧凑,可以传递较大扭矩等优点,如图 1‑12。
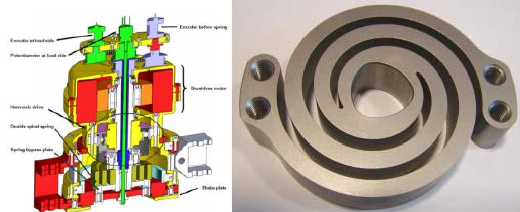
图 1‑12 双螺旋SEA
2014年,哈尔滨工业大学在外骨骼关节处使用了一款引入特制弹性元件的旋转型SEA,在锥齿轮减速器和关节之间配置了特制盘型弹性单元[15],如图 1‑13。
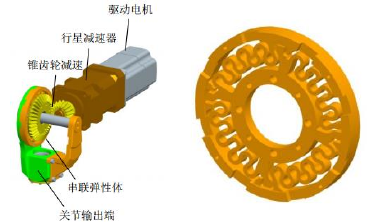
图 1‑13 特制弹性元件SEA
- SEA在足式机器人中应用现状
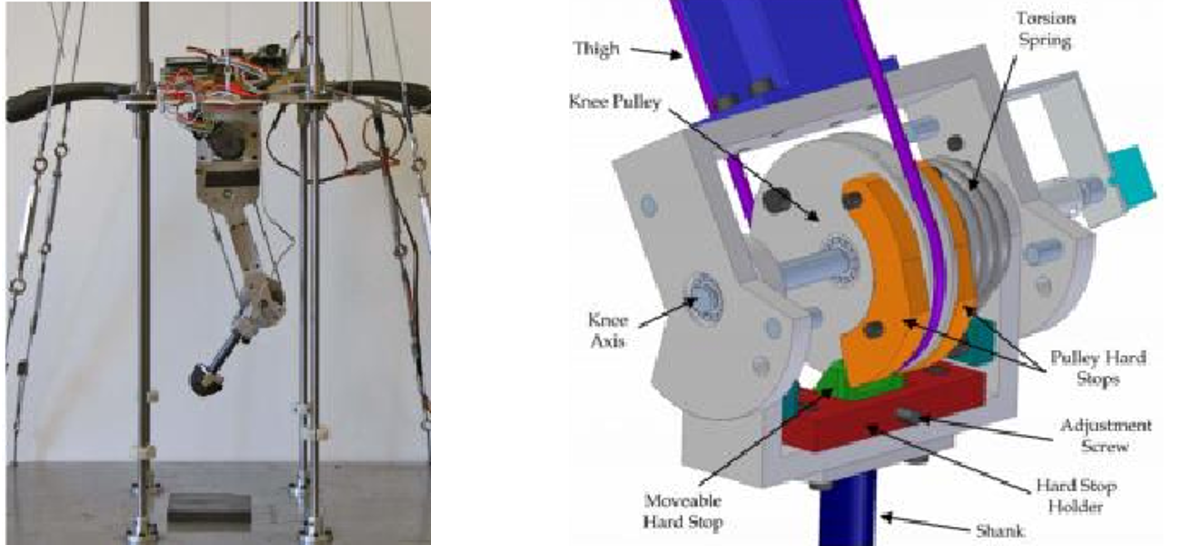
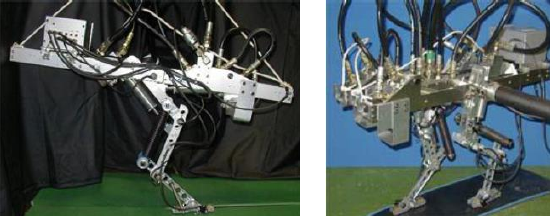
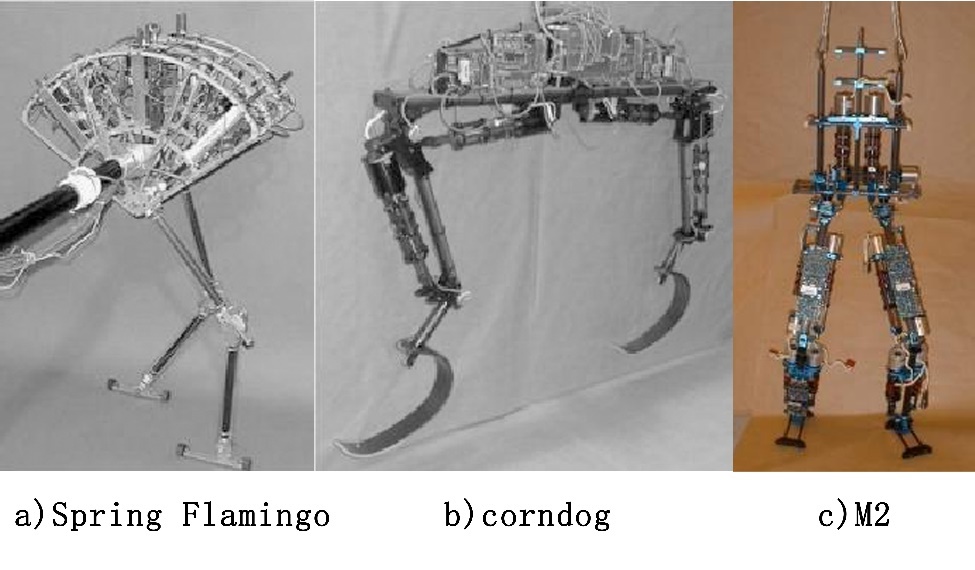
在单腿机器人的基础上,麻省理工Leglab实验室在1994年前后开始了SEA在双足机器人上的应用。Leglab实验室设计研发了多款足式机器人样机(如图 1‑14),使用了相同结构的串联弹性作动器(如图 1‑15),即电机丝杠螺母-弹簧型SEA。通过测量弹簧的型变量可以测出末端输出情况。
Sprin Flamingo步行机器人具有两个足关节[16],不同于日本传统的控制方法,这款机器人采用了虚拟模型的控制理论,机体双腿内分布着六个SEA,通过绳传动传导力。力伺服控制的SEA实现了整机的虚拟模型控制,使机器人实现了平地平稳步行。在Sprin Flamingo的基础上MIT还研发了双足奔跑机器人Corndog与仿人三维双足机器人[17],均使用了串联弹性作动器提升关节素质,通过SEA实现虚拟模型控制,达到良好的与环境交互效果,具有复杂环境下较好的鲁棒性。
以上是毕业论文大纲或资料介绍,该课题完整毕业论文、开题报告、任务书、程序设计、图纸设计等资料请添加微信获取,微信号:bysjorg。
相关图片展示: