乒乓球机器人击球策略与力度控制的设计毕业论文
2020-02-18 11:56:56
摘 要
近几年来,PPR是国内外在人工智能方面的一个热点研究问题,它涉及智能控制技术、传感器技术、机器人轨迹规划、嵌入式控制、机械系统快速响应、视觉伺服等方面,所涵盖的技术可应用到其他相关领域。如,救援机器人与PPR在路径规划方面有着共同的特点。因此,对PPR的研究具有较强的实用价值,对于推动世界科技水平进步和改善人类生活水平有着重要的意义,
本课题重点研究PPR的击球策略和力度控制,其目的在于实现PPR与人进行简单的对抗赛。本课题设计具体内容如下:
首先,设计出PPR的控制系统,此系统主要由FPGA和嵌入式处理器组成,并搭建基于Socket和LVDS的通信网络。
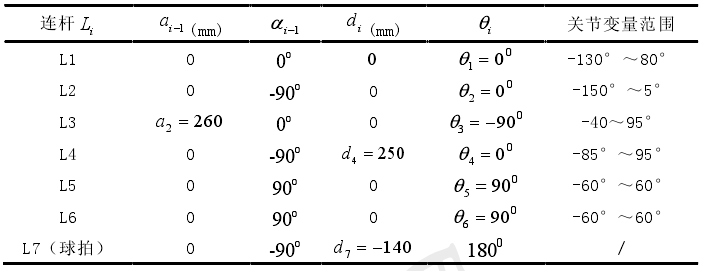
其次,对机械臂的速度运动学、位置运动学以及关节空间轨迹规划进行研究。通过D-H法在机械臂上建立基坐标系,对机械臂的正运动学进行求解;分析了基坐标系与视觉坐标系之间的位置速度变换;利用求解雅可比矩阵的方法对机械臂的逆运动学进行求解。最后本文引进了基于五次多项式的关节空间轨迹规划。
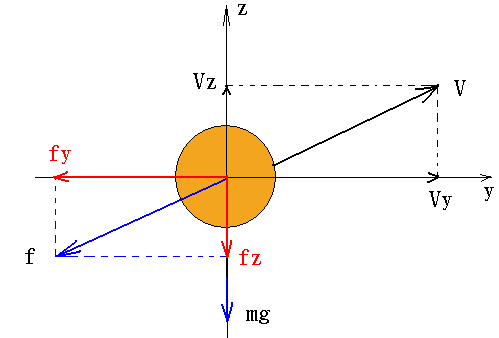
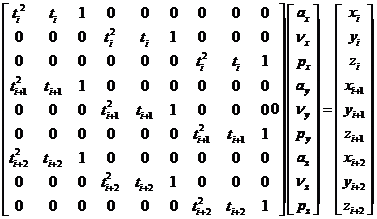
再其次,为了达到与人简单对打的目的,本课题主要研究PPR的击打策略与力度控制,利用系统辨识的预测方法对乒乓球运动轨迹进行预测,并对乒乓球与球台碰撞模型进行了分析,基于SNTP的对时协议实现了对视觉系统和控制系统的时间同步;对球拍击球模型进行了分析,可根据来球速度和期望落球点反求解击球时球拍的姿态和力度;对击球时机,击球位置,击球时球拍姿态和击球力度分析与计算,并提出任务层规划,实现了精准击球。
最后,对本课题中乒乓球飞行轨迹预测进行了仿真,结果表明此预测方法是有效的,达到了设计的目的。
关键词:PPR;击球策略;力度控制;轨迹预测;SNTP;任务层规划
Abstract
In recent years, table tennis robots have been a hot research topic in artificial intelligence at home and abroad. They involve intelligent control technology, sensor technology, robot trajectory planning, embedded control, mechanical system rapid response, visual servoing, etc. Technology can be applied to other related fields. For example, rescue robots and table tennis robots have common features in path planning. Therefore, the research on table tennis robots has strong practical value, which is of great significance for promoting the advancement of the world's scientific and technological level and improving the living standards of human beings.
This topic focuses on the batting strategy and strength control of table tennis robots. The purpose is to achieve a simple match between table tennis robots and people. The specific content of this topic is as follows:
First of all, the control system of the table tennis robot is designed. The system is mainly composed of FPGA and embedded processor, and builds a communication network based on Socket and LVDS.
Secondly, the velocity kinematics, positional kinematics and joint space trajectory planning of the manipulator are studied. The base coordinate system is established on the manipulator by DH method, and the forward kinematics of the manipulator is solved. The position velocity transformation between the base coordinate system and the visual coordinate system is analyzed. The inverse of the manipulator is solved by the method of solving the Jacobian matrix. Kinematics is solved. Finally, this paper introduces the joint space trajectory planning based on the fifth-order polynomial.
Secondly, in order to achieve the goal of simple confrontation with people, this topic mainly studies the hitting strategy and strength control of table tennis robots, predicts the trajectory of table tennis by using the system identification prediction method, and compares the table tennis and table collision model. After analyzing, the time synchronization protocol based on SNTP realizes the time synchronization of the vision system and the control system. The racket hitting model is analyzed, and the attitude and strength of the racket can be solved according to the ball speed and the expected ball drop point. Analysis and calculation of the hitting timing, the hitting position, the racket posture and the hitting strength when hitting the ball, and the task layer planning is proposed to achieve accurate hitting.
Finally, the simulation of table tennis flight trajectory in this subject is simulated. The results show that this prediction method is effective and achieves the purpose of design.
Key words: table tennis robot; batting strategy; velocity control; trajectory prediction; SNTP; task layer planning
目 录
摘要 I
Abstract II
第1章 绪论 1
1.1 课题研究目的和意义 1
1.2 PPR国内外研究现状 1
1.3 PPR控制策略 3
1.4 本课题主要研究内容 3
1.5 本章小结 3
第2章 PPR控制系统设计 4
2.1 引言 4
2.2 PPR系统组成 4
2.2.1 机械系统 4
2.2.1 视觉系统 5
2.2.1 控制系统 5
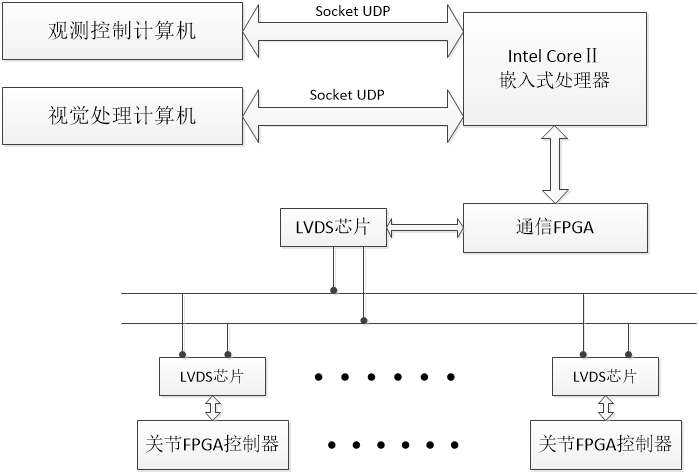
2.3 控制系统硬件设计 5
2.3.1 控制系统总体结构 5
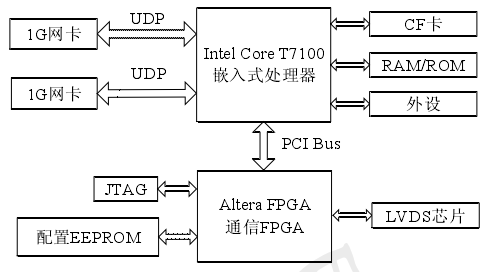
2.3.2 中央控制器 6
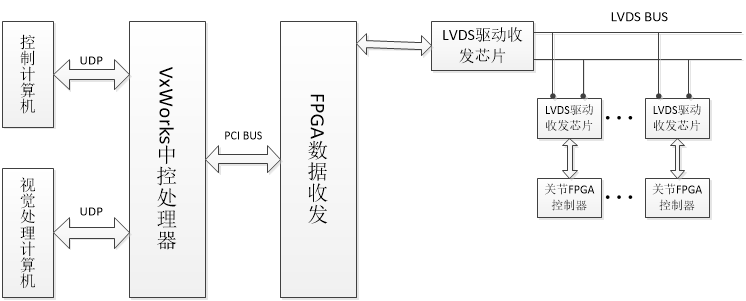
2.3.3 控制系统通信结构 7
2.4 系统软件设计 7
2.5 本章小结 8
第3章 运动学分析及关节位置控制 9
3.1 引言 9
3.2 机械臂正逆运动学分析 9
3.2.1 正运动学求解 9
3.2.2 逆运动学求解 11
3.2.3 基坐标系与视觉坐标系坐标变换 13
3.3 雅可比矩阵求解 14
3.4 机械臂关节空间轨迹规划 15
3.5 本章小结 16
第4章 PPR击球策略与力度控制 17
4.1 引言 17
4.2 乒乓球飞行轨迹预测 17
4.2.1 基于物理模型的预测方法 17
4.2.2 基于IST系统辨识的预测方法 18
4.2.3 乒乓球与球台碰撞模型 20
4.3 时间同步 21
4.4 球拍姿态与力度控制 22
4.5 击球策略 25
4.5.1 击球点的选择 25
4.5.2 任务层规划 27
4.6 本章小结 28
第5章 仿真与分析 29
5.1 仿真结果 29
5.2 仿真程序 30
5.3 结果分析 30
总结 30
参考文献 31
致谢 33
第1章 绪论
1.1 课题研究目的和意义
乒乓球作为我国国球一直深受重视,然而对于PPR的研究我国开始得较晚,与国外有较大差距。近年来人工智能成为社会热点话题,而PPR(Ping-Pong Robot)正是这种技术的一种典型应用。它涉及智能控制技术、轨迹规划、传感器技术、嵌入式控制、机器学习、视觉伺服等核心技术,它涵盖的技术可应用到其他相关领域上,对于推动世界科技水平进步和改善人类生活水平有着重要的意义,因此对PPR研究具有较高的实用价值[1]。
1.2 PPR国内外研究现状
乒乓球运动具有极高的竞技性,因而要实现机器人与人对打比较困难,怎样捕捉高速运动的乒乓球,如何精准地将来球回击到指定位置,这些都是技术难点[2]。
John Billiney早在1983年便提出了PPR运动 [3,4],之后欧美国家和日本都对PPR做了大量研究。
通过研究乒乓球运动过程,1987年美国贝尔实验室Andersson设计出了一个下图中六自由度的PUMA260机械手,以四个高速摄像头作为视觉系统,击球水平较高.之后Andersson出版了专著“A Robot Ping-Pong Player: Experiments in Real-Time Intelligent Control(AI)”[5,6,7,8],此书在国外掀起了研究PPR的热潮,至今对于PPR研究仍然具有参考作用。
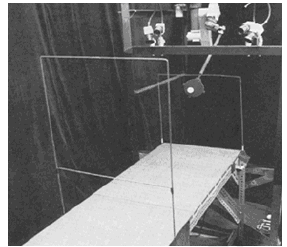
图1.1 PUMA260机械手臂
西班牙拉古纳大学的Acosta设计出一种成本较低的PPR,该机器人具有两个机械手臂。但此机器人只能挡球而不能回球[9],故其无法使用正常球台击球,其球台为正常球台一半大小。
日本宫崎实验室的Miyazaki研发了双目视觉的PPR,共有四个自由度,有两个自由度决定机器人击球时球拍的位置,另两个自由度决定乒乓球拍的姿态[10,11]。此PPR击球准确率较高,可控制出球的落点,但其机械手臂固定在乒乓球台上故而运动受限。
德国的Mulling研发了下图中七自由度PPR,该机器人单次击球准确率较高,但暂且有待进一步研究[12,13]。
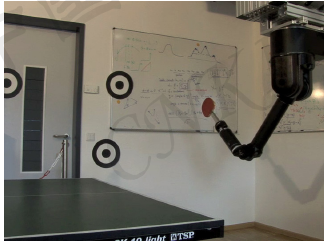
图1.2 Mulling设计的PPR
2007年在国际机器人展会上越南的Tosy公司展出下图中仿人PPR“TOPIO”[14],该机器人采用双目视觉,能实现与人对打功能。

图1.3 机器人TOPIO
我国对PPR进行深入研究的主要有浙江大学和中科院自动化研究所。2006浙江大学研制出第一代PPR,可实现简单击球,该机器人为单目视觉系统[15]。以第一代机器人为基础,浙江大学研究出PPR二代,机械系统和控制系统得到改进,将单目视觉系统改为双目视觉系统,故而视野范围变大。可实现人机对打[16]。2008年,浙江大学着手研制PPR 第三代,这一代PPR为七自由度机械臂,击球空间更大,动作更加灵敏,以两台PC机作为控制核心。
比较国内和国外研究现状,国外对于PPR的研究起步较早,研究也更深入一些,基本上实现了人机对打,科技水平较高;国内对于PPR的研究要落后一大截,从事这方面研究的人员也较少,对PPR的研究一些机构还处于低水平。Ping-Pong robot对于机器人技术的进步有很重要的推动作用,需要广大科研工作者对其进行进一步研究,本文也将对其中某些方面进行一定的探索。
1.3 PPR控制策略
由于乒乓球运动的复杂性,所以对视觉系统的实时性要求较高,机械系统的响应速度要快,为实现人机对打,则对PPR智能化有较高要求。上述条件导致了PPR的控制策略的复杂性。通过查阅文献,列举以下几种常用的控制策略:
Andersson利用物理建模法,通过对乒乓球整个运动过程进行建模,构建球拍运动的函数,求解出击球点和击球时机[17,18]。此方法计算量较大,对系统硬件要求较高,但是能适应现场环境的变化。
西班牙的Acosta研发的PPR,通过分析动力学模型的方法对乒乓球飞行轨迹进行预测,但是他们并未考虑乒乓球与球台的碰撞,这不符合乒乓球运动规则[9]。
基于机器学习,德国的Mulling让PPR模仿人类击打乒乓球的动作,从而让PPR的动作更拟人化,但有待进一步研究[19,20]。
浙江大学提出了自己的方法来对乒乓球轨迹进行预测,他们采用动态Kalman滤波器来追踪乒乓球的轨迹[21,22]。
上述击球策略在一定程度上使得PPR实现了智能化,能让机器人与人进行简单对打游戏,但是其与人类击球水平差距较大,智能化还不够。
1.4 本课题主要研究内容
本设计在六自由度仿真机械手臂的基础上,采用了基于VxWorks系统的嵌入式多任务实时控制系统,对乒乓球飞行轨迹进行了预测,完善了击球策略以及实现了对机械臂的控制,最终达到精准击球的目的。
本课题主要研究内容如下:
⑴采集乒乓球飞行轨迹信息,并完成预测算法;
⑵对乒乓球与球台碰撞模型进行分析;
⑶通过分析击球过程计算出击球时球拍的位姿和力度;
⑷完成对PPR击球策略的设计
1.5 本章小结
本章介绍了本课题研究目的及意义,对比了国内外关于PPR这个课题的研究现状,并对几种典型的机器人控制决策进行分析,最后概述了本文主要研究内容。
第2章 PPR控制系统设计
2.1 引言
一般标准规格的乒乓球台长是274cm,宽是153cm,球网高153cm[23]。乒乓球飞行速度很快,一次飞行时间大概为0.5秒,在如此短的时间内要完成对乒乓球轨迹进行预测、控制机械手臂到达指定位置以指定姿态和力度进行击球等一系列任务,这对PPR的控制系统要求很高。本章将对控制系统的硬件部分与软件部分进行介绍。
2.2 PPR系统组成
本文中设计的PPR由三大部分组:机械系统、控制系统、视觉系统。视觉系统利用高速摄像机实现对乒乓球运动轨迹的采样检测,从而计算出乒乓球的实时坐标,并最终预测出乒乓球飞行轨迹,其作用相当于人类的眼睛;机械系统接收来自控制系统的信号,并按照要求迅速动作,相当于人类的手;控制系统接收来自视觉系统关于乒乓球的飞行轨迹信息,
按照规划好的击球决策控制机械系统动作,其作用相当于人类大脑。
要实现精准击球,这三个子系统需要协调一致工作,三个系统关系如下图:
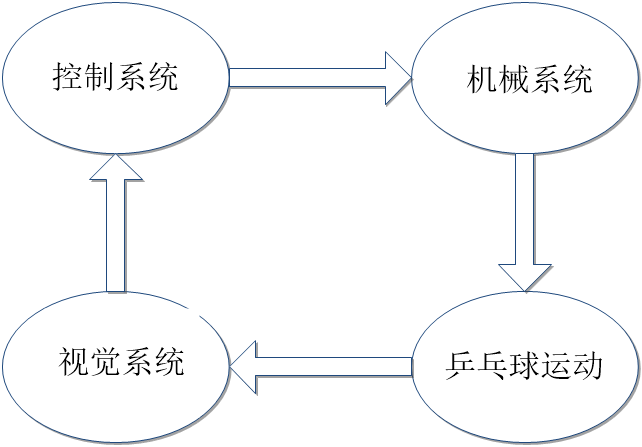
图2.1 子系统关系图
2.2.1 机械系统
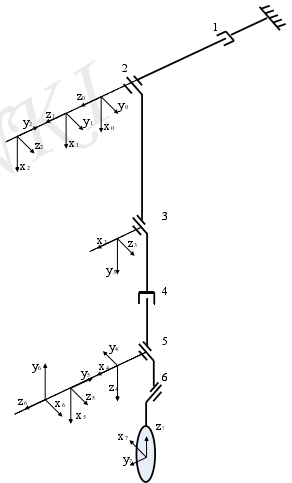
本文中机械系统选择已经研制成功的仿人机械手臂,此机械手臂为六个自由度,设计成开环链式结构。分别有2个肩关节、1个肘关节、3个腕关节,能实现肩部旋转、肩部俯仰、肘部俯仰、腕部旋转、腕部俯仰、腕部侧摆等功能[24]。
此机械手臂性能参数如下:
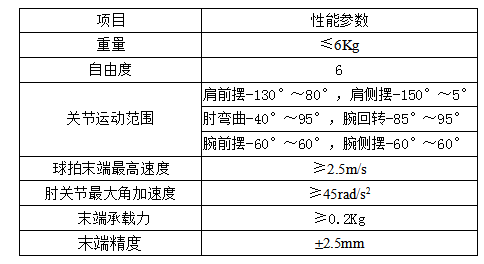 表2.1机械手臂性能参数
表2.1机械手臂性能参数
2.2.2 视觉系统
本文视觉系统为双目视觉系统,采用两台高速摄像机。摄像机采用美国Imprex公司研发的IM48L摄像机,它具有视场大,高分辨率,速度快的优点。图像采集卡为DALSA公司的X64-CL-iPro系列图像采集卡,此采集卡具有处理速度快,帧数高的优点,能满足对乒乓球飞行轨迹信息进行实时采样的要求。
视觉系统实时采集乒乓球轨迹信息,并计算出其三维坐标,计算量比较大,因此需要
另外准备一台高性能PC机作为视觉处理器。处理后得到乒乓球实时的三维坐标,通过UDP协议将数据传输给中控处理器,从而完成击球动作。
以上是毕业论文大纲或资料介绍,该课题完整毕业论文、开题报告、任务书、程序设计、图纸设计等资料请添加微信获取,微信号:bysjorg。
相关图片展示: