自动导引小车轨迹识别毕业论文
2020-04-15 21:04:38
摘 要
随着经济与汽车工业的飞速发展,道路上的汽车越来越多。交通安全以及环境问题逐渐引起人们的关注。为了应对环境问题,人们开始研制新能源汽车,而为了应对交通安全问题,人们开始研究智能汽车以及自动驾驶汽车。所谓智能汽车,即是一种通过各种传感器采集外部环境的实时信息,并将在这些信息进行分类处理,利用先验知识以及预设路径等在没有外部干预的情况下进行最优路径规划到达目的地。智能汽车系统是一个集信息采集与处理、智能控制、机械设计、控制科学以及车辆工程等于一体的复杂系统。
以NXP全国大学生智能车竞赛为背景,提出了新的智能车图像处理方案。由摄像头拍摄实时路径信息,再进行图像处理,对摄像头拍摄的实时路径信息进行滤波、去噪和校正等处理,识别出赛道的左右边缘,根据特征值判断赛道类型然后进行相应的速度与方向的控制。有几种可能的轨道类型,包括直道,弯道,十字,大小环岛,S弯、障碍等问题。有效、准确且实时的图像信息是识别赛道与对智能车进行相应控制的前提,所以将摄像头采集到的图像进行高效且准确的处理是智能车设计与制作中的重中之重。实验表明该方案能高效地处理摄像头图像,并能提供准确的图像信息。因此,该方案在汽车智能化等应用中具有很高的实用价值。
关键词:MT9V032 路径识别 图像处理
Trajectory Recognition of Automatic Guided Vehicle
Abstract
With the development of economy and automobile industry, more and more cars are on the road. Traffic safety and environmental problems have gradually attracted people's attention. In order to deal with environmental problems, we began to develop new energy vehicles, and in order to deal with traffic safety problems, people began to study smart cars and self driving cars. The so-called smart car is not only a kind of real-time information gathered from the external environment through a variety of sensors, but also classified and processed. It uses prior knowledge and preset path to achieve the destination without external interference. Intelligent vehicle system is a complex system that integrates information collection and processing, intelligent control, mechanical design, control science and vehicle engineering.
Based on the NXP National College Intelligent Vehicle Competition, a new design and control scheme of Intelligent Vehicle is proposed. Real-time path information is captured by the camera, and then processed by image processing. The real-time path information captured by the camera is filtered, denoised and corrected. The left and right edges of the track are identified, and the type of the track is judged according to the eigenvalues, and then the corresponding speed and direction are controlled. There are several possible types of track, including straight, curved, cross, large and small ring islands, S-bend, obstacles and so on. Effective, accurate and real-time image information is the premise of identifying the track and controlling the smart car. Therefore, efficient and accurate processing of the image captured by the camera is the most important task in the design and manufacture of the smart car. Experiments show that the scheme can process camera images efficiently and provide accurate image information. Therefore, the scheme has high practical value in the application of automobile intelligence.
Keywords: MT9V032; path recognition; image processing
目录
摘 要 I
Abstract II
目 录 III
第一章 引言 2
1.1 概述 1
1.2 国内外智能车的研究现状 1
1.3 研究的内容和意义 2
第二章 智能车图像采集 5
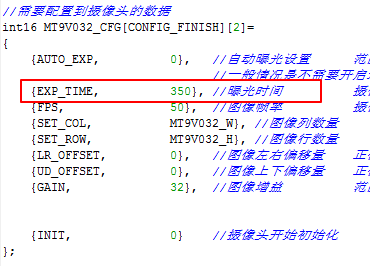
2.1 MT9V032摄像头 5
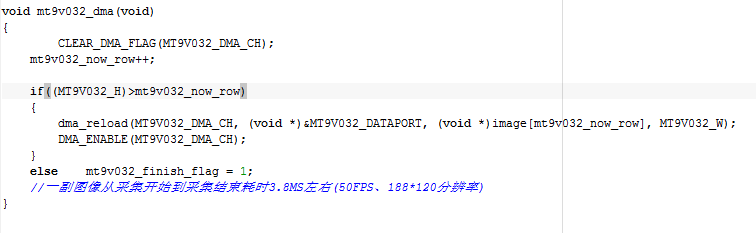
2.1.1 DMA触发方式的选择对图像采集的影响 8
2.1.2 摄像头采集图像常见问题及原因分析 9
2.2 静态图像采集 11
2.2.1 静态直道图像采集 11
2.2.2 静态弯道图像采集 12
2.3 动态图像采集 14
2.3.1 动态直道图像采集 14
2.3.2 动态弯道图像采集 16
第三章 智能车图像信息处理算法 18
3.1 边缘检测法 18
3.1.1 边缘检测算法的优化 22
3.1.2 动、静态图像的边缘检测算法效果对比 24
3.2 二值化 25
3.2.1 图像滤波 31
3.2.2 图像去噪 33
3.3 赛道边沿识别 33
3.3.1 中线提取 34
3.3.2 弯道识别 36
第四章 系统调试 38
4.1系统调试方案设计 38
4.2系统调试与结果 38
结 语 45
参考文献 46
致 谢 48
附录1:主程序代码 49
第一章 引言
1.1 概述
十九世纪末期,本茨发明了人类历史上第一辆汽车,现如今,汽车越来越普及。汽车的飞速发展导致道路上的车辆越来越多,随之而来的交通安全问题以及环境问题逐渐引起人们的关注。现如今,人们需要的不仅仅是便捷的交通工具和舒适的交通体验,汽车的节能、安全、环保等诸多问题成为汽车行业进一步发展需要攻克的重点与难点。
智能汽车(可简称为智能车),它是一种通过摄像头、雷达等传感器采集车辆外部环境的实时信息,并将在这些信息分类处理,利用计算机和先验知识在无外部干预的情况下进行最优路径规划并安全行驶到达目的地智能车辆。随着人工智能的发展,如何将人工智能与传统汽车结合起来弥补人为错误、解决汽车安全等问题,使未来汽车朝着更加智能化、人性化与自动化的方向发展。
以上是毕业论文大纲或资料介绍,该课题完整毕业论文、开题报告、任务书、程序设计、图纸设计等资料请添加微信获取,微信号:bysjorg。
相关图片展示: