小型四旋翼无人机的动力学建模与飞行控制毕业论文
2020-04-15 20:39:43
摘 要
21世纪以来,无人机已被广泛的应用到军事、民用等各个领域,小型四旋翼无人机作为无人机的一种典型,具有结构简单,操作方便,易于控制等优点。关于它的研究一直是一个热门主题,在它的控制过程中存在很多问题,有上下、左右、前后、翻滚角、俯仰角、偏航角六个自由度,却只有四个控制量,具有强耦合、欠驱动、非线性等特性;环境因素也是一个很大的干扰。因此,小型四旋翼无人机的系统建模和姿态控制一直是一个难点。
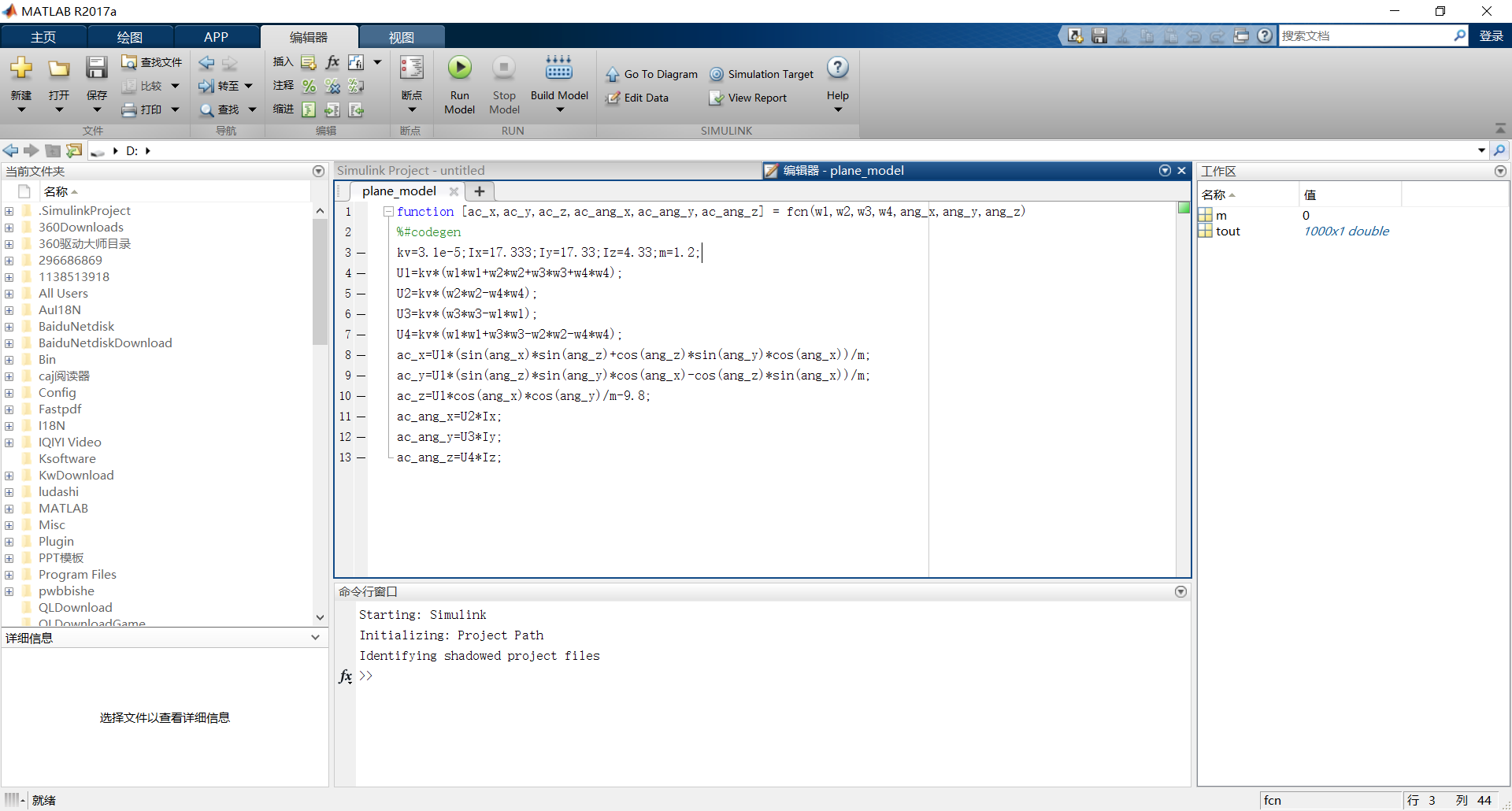
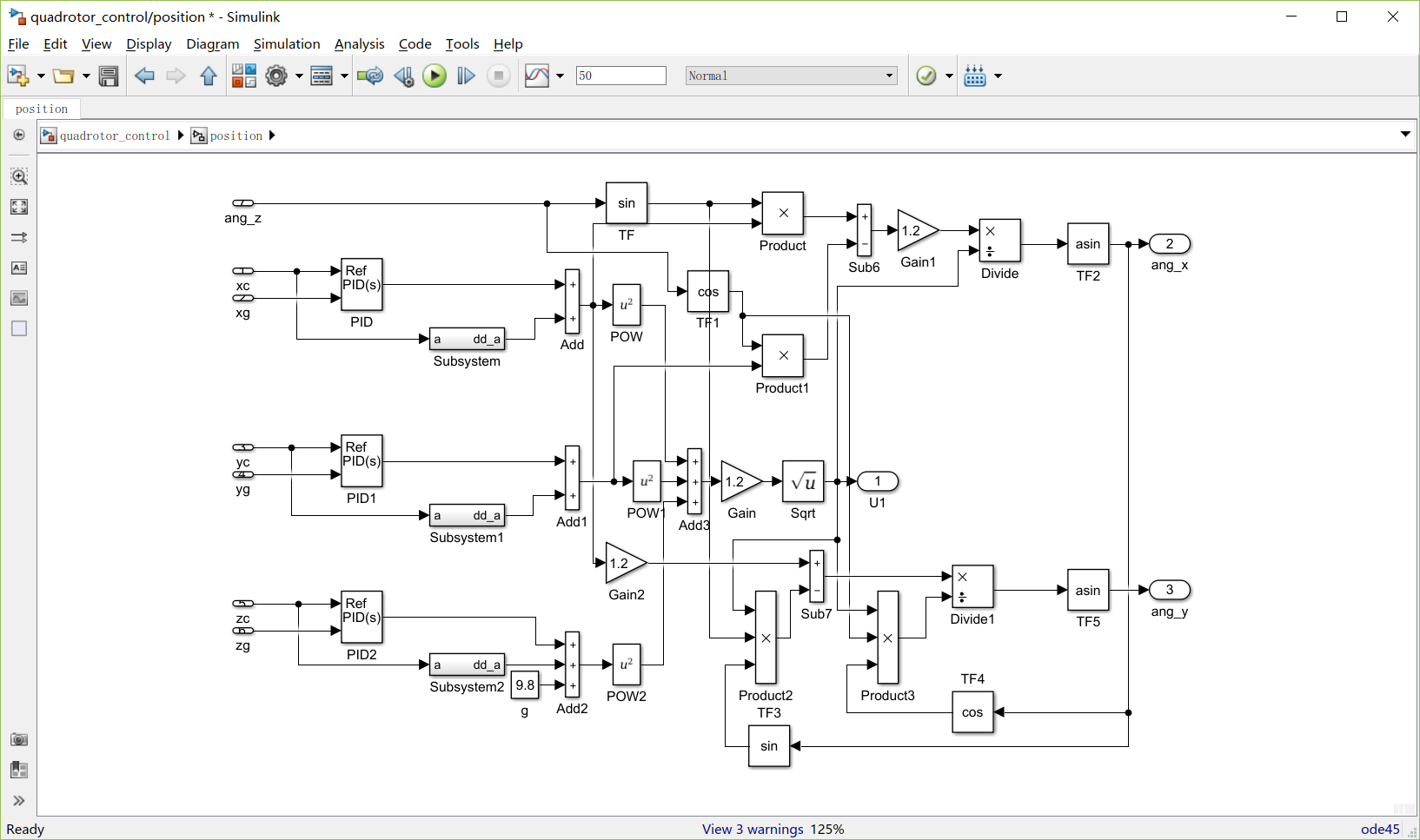
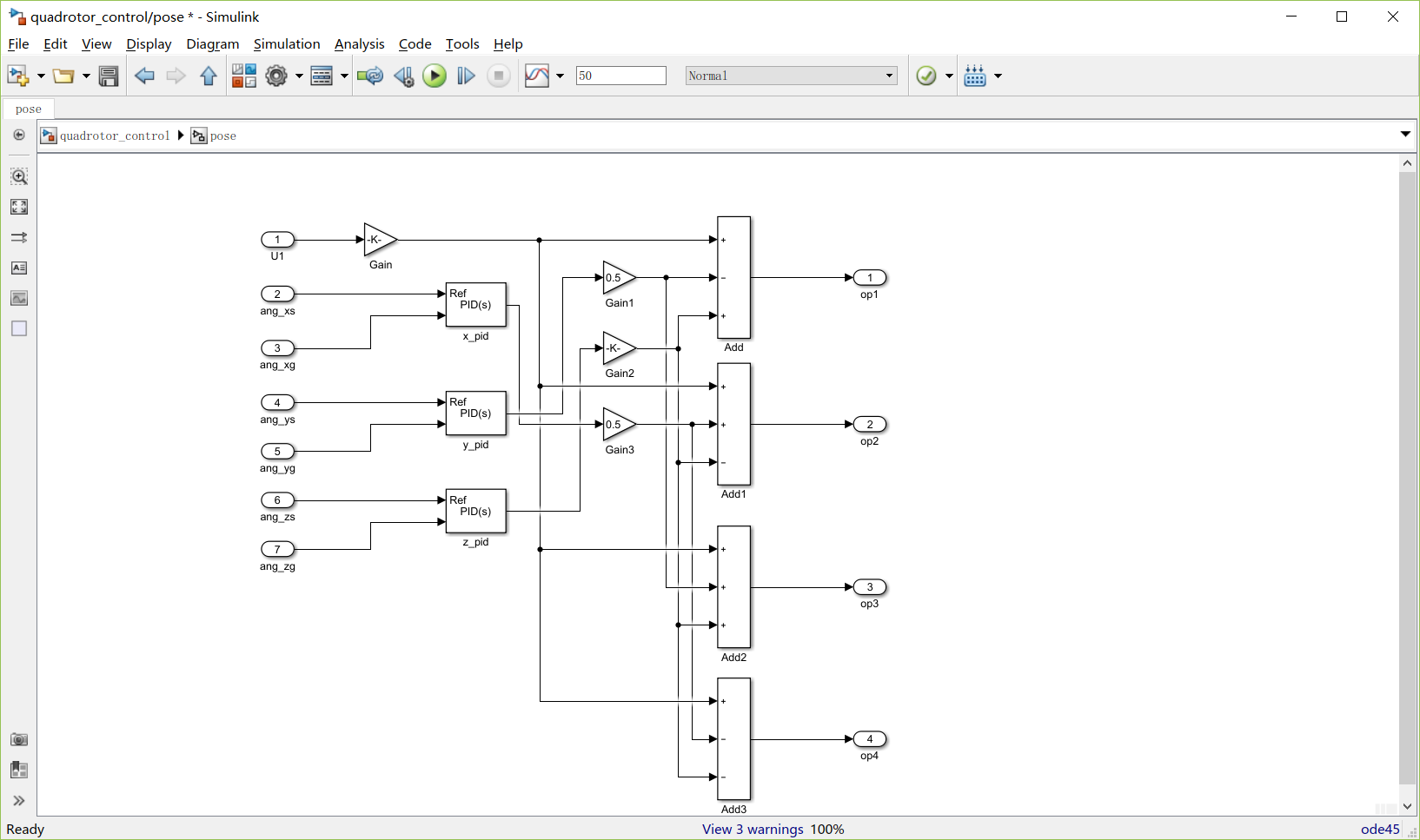
为了实现无人机的稳定控制,本文主要做了以下几个方面的工作。利用机理建模的方法建立小型四旋翼无人机的数学模型。利用牛顿-欧拉法、几何学方法和坐标转换矩阵建立四旋翼的动力学模型和运动学模型,并在忽略一定外界干扰的条件下对模型进行简化。在算法方面,本文主要采用PID控制算法,设计无人机的控制,对姿态控制采用双闭环PID控制。之后用MATLAB/ Simulink对飞行控制算法进行仿真;最后在实验室控制平台上,尝试对四旋翼飞行器进行实际控制。
关键词:小型四旋翼无人机;动力学建模;飞行原理;PID控制
Dynamic Modeling and Flight Control of Small Quadrotor UAV
Abstract
Since the 21st century, UAV are useful in military and civilian applications. Small quadrotor drone as a typical of UAV, it has simple structure, easy to control, etc. Its research has always been a hot topic. Small quad-rotor UAV has six degrees of freedom, including up and down, left and right, front and back, roll Angle, pitch Angle and yaw Angle, but only four inputs. It has strong coupling, under actuation, nonlinearity etc. In addition, environmental factors are also a big distraction. Therefore, the system modeling and attitude control of small four-rotor UAV is a complicated question.
In order to achieve the stability control of UAV, the aspects are done in this paper. The Newton-Euler method, the geometrical method and the coordinate transformation matrix are used to establish the dynamic model and the kinematic model of the quadrotor, and the model is simplified under the condition of neglecting certain external perturbations. This document mainly adopts the PID control algorithm and adopts double closed loop PID control for attitude control. Then, the flight control algorithm is simulated with MATLAB / Simulink. Finally, in the four-rotor aircraft control platform of the laboratory, the attitude and position of the quadrotor are actually controlled.
Key words: Small quad-rotor unmanned aerial vehicle; Dynamic modeling;principle of flight;PID control
目录
小型四旋翼无人机的动力学建模与飞行控制 I
摘要 I
Dynamic Modeling and Flight Control of Small Quadrotor UAV II
Abstract II
第一章 绪论 1
1.1研究背景与意义 1
1.2研究现状 2
1.2.1数学模型 2
1.2.2姿态控制算法 2
1.3 本章小结 3
第二章 小型四旋翼无人机数学建模 4
2.1飞行原理 4
2.1.1垂直升降 4
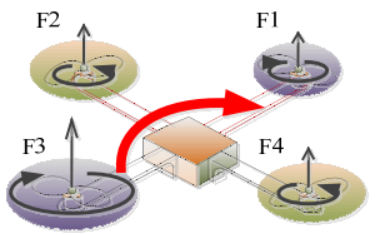
2.1.2翻滚运动 4
2.1.3俯仰运动 5
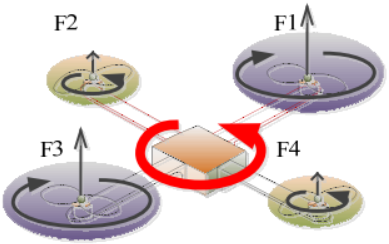
2.1.4偏航运动 6
2.1.5左右运动 6
2.1.6前后运动 6
2.2坐标系 7
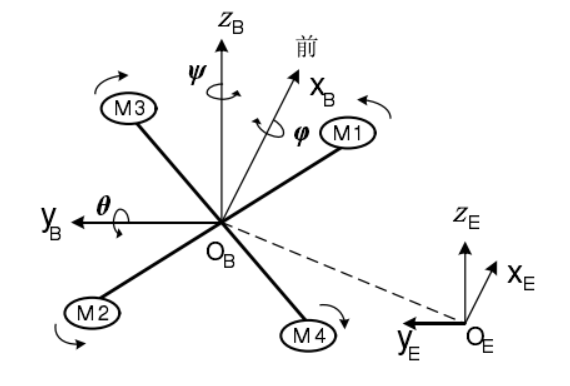
2.2.1建立坐标系 7
2.2.2转化矩阵 7
2.3数学建模 8
2.4 本章小结 11
第三章 姿态控制算法 12
3.1 控制器设计 12
3.2 PID控制 12
3.2.1 比例控制 12
3.2.2 积分控制 13
3.2.3 微分控制 13
3.3 双闭环串级PID控制 13
3.4本章小结 15
第四章 MATLAB/ Simulink仿真与实验 16
4.1MATLAB/ Simulink仿真 16
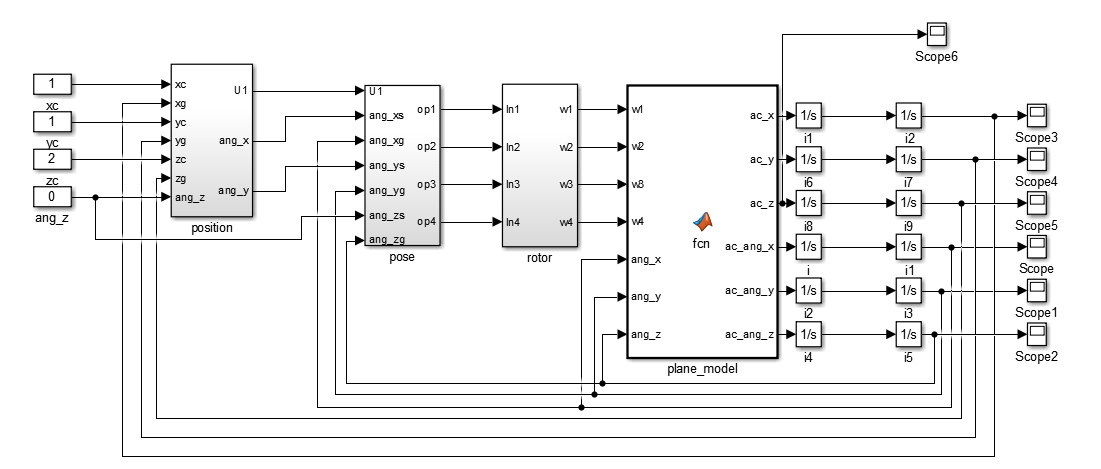
4.1.1搭建仿真模型 16
4.1.2仿真结果 18
4.2 实验 19
4.2.1实验平台AR Drone 2.0 19
4.2.2实验模型 20
4.2.3 实验结果分析 23
4.3 本章小结 24
第五章 总结与展望 25
5.1本文总结 25
5.2未来展望 25
5.2.1智能化 25
5.2.2 多功能化 25
5.3自动化技术对社会的影响 26
参考文献 27
致谢 29
第一章 绪论
1.1研究背景与意义
小型四旋翼无人机之所以很多人研究,是因为它自身就有着相比其它无人机(UAV)的优点,重量轻、体积小、结构简单、易于控制等。近些年来,无人机领域发展迅速,小型四旋翼以其独特的优点更是被人们喜爱,它被广泛的应用到军事领域,工业领域,民用领域,商业领域等方面。无人机的发明最先应用的军事领域,在上个世纪,无人机的发明让人眼前一新,但由于昂贵的造价和技术的要求,使得无人机没有普遍发展。由于无人机是无人驾驶,可以远程操作和自动控制,并且不存在人工操作的误差,所以在军事领域中,往往可以代替人力,去执行那些有人生安全以及精度要求高保密性强的工作;随着无人机的发展,技术越来越成熟,很好的适应了工业发展的要求;在近几年来,随着自动化技术,计算机技术以及人工智能等技术的发展,无人机也得到一个飞速的发展,被普遍应用到民用[1],商业等领域。在民用领域,有气象检测、物流快递等;在商业领域,有供无人机爱好者娱乐的,也有用于摄影航拍等方面的。总的来说,无人机已经得到了广泛的应用,随时间发展,还会被应用到更多的领域。无人机的发展解决了我们很多生活中的难题,也有利于新兴行业的发展,对国民经济更是起到了很大的促进作用,因此具有很大的市场潜力。
旋翼式无人机相对于固定翼式无人机,通过改变旋翼的旋转速度的,引起飞行浮力的变化,再通过不同旋翼的速度变化,来达到姿态控制的目的。固定翼式无人机则是通过升降舵,方向舵,副翼来改变飞行姿态的。固定翼式无人机无法完成复杂的动作,但旋翼式无人机重量轻、体积小、结构简单,可以完成悬停,垂直升降等复杂动作,并易于控制[2]。
以上是毕业论文大纲或资料介绍,该课题完整毕业论文、开题报告、任务书、程序设计、图纸设计等资料请添加微信获取,微信号:bysjorg。
相关图片展示: