重型AGV定位寻迹控制系统设计开题报告
2020-02-19 22:35:45
1. 研究目的与意义(文献综述)
【研究的目的及意义】
agv(automated guided vehicle)即“自动导引运输车",是指装备有电磁或光学等自动导引装置,它能够沿规定的导引路径行驶,具有安全保护以及各种移载功能的运输车。
近年来,由于工厂自动化生产的需要,对自动引导运输车的使用越来越广泛,例如智能仓库、车间柔性制造、物流系统等,同时对agv机器人的路径规划、群体合作、智能调度提出了一些新的要求“要实现agv在一些复杂网络路线的引导,准确可靠的定位较为关腱。目前国内外对agv定位方法的研究主要包括:无线射频识别技术(rfid技术)、视觉定位、二维码定位、超声波定位、红外定位等。agv机器人在一些较为复杂网络的派遣过程当中,需要对其进行路线的规划,并让机器人按照预定的路线行驶。这就需要机器人具备对路线编号进行识别的能力,这种对路线的识别过程也可称之为定位。在知道自己所处的路段之后,就可以在岔路时选择合适的线路,进行线路的切换,准确地按照所规划路径行驶对agv的运输过程至关重要。
2. 研究的基本内容与方案
【研究的基本内容及目标】
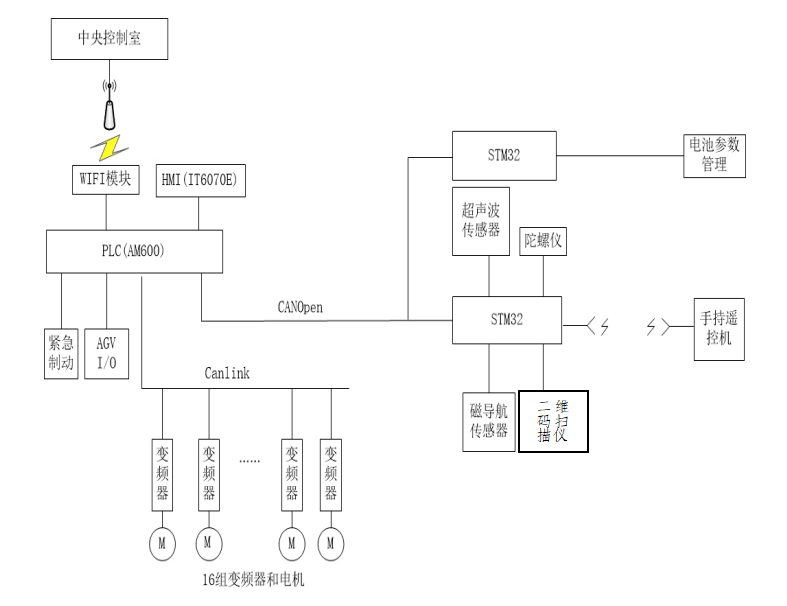
本文以设计可将位于存储库的货物高效、快捷、无误地运送到检测库房的各个不同的检测工位进行检测,完成后又需将被检货物存储到指定货位得重型agv车辆为背景,以重型agv定位寻迹控制系统为研究对象,旨在设计一个安全可靠、定位准确、高效快捷的定位寻迹控制系统,对agv定位寻迹控制系统进行软件及硬件设计。所要研究的agv总控制图如图1:
3. 研究计划与安排
【进度安排】
1-3周 了解设计要求,查阅资料,完成方案设计和开题
4-6周 完成agv定位导航与寻迹总体方案设计,stm32单片机,rfid技术,汇川am600 plc学习。
4. 参考文献(12篇以上)
【参考文献】
[1]吴伟涛,刘文波. 磁引导式差速转向 agv 的电机确定与磁导航方法[j].机电信息.2012(36).
[2]何利英. 机电plc综合控制. 北京理工大学出版社[m].2017
[3]杨先龙. 磁导航式差速 agv 的结构及控制设计[d].合肥工业学,2014.



