基于PLC的机械手控制系统研究毕业论文
2020-02-19 07:52:56
摘 要
进入21世纪后,随着中国虚拟经济的飞速发展和其他行业的干扰,生产车间的工人的数量大大减少,工业生产中的效率也愈来愈低。例如,近年来东南沿海地区就业岗位严重短缺,导致许多工厂面临倒闭的局面。为尽快使车间工作生产率进步,降低劳动者的工作强度,需要增加产业中国的自动化。经过将机械手应用于工业自动化生产线后,加工车间自动把物品从一条生产线运输到另一条生产线,这能够完成高度自动化生产,从而减少工业工人不必要的工作并改善工作效率。
本次研究所设计的基于PLC的机械手控制系统需实现对物体的搬送,该机械手按以下动作来对物体进行移动:原位、下降、夹紧、上升、左移、下降、放松、上升、右移、原位。且操作工程中,机械手的运动既可以是自动的,也可以通过外部输入来操作。考虑到控制要求和实际情况,采用了Siemens S7-300系列PLC。且应用编程软件STEP7,在研究机械手工作原理和工艺流程的基础上,进行了控制方案的分析与I/O建立,并开发了机械手的手动和自动控制子程序。应用仿真软件进行机械手控制系统的仿真调试,达到预期效果。
机械手的巨大作用正逐渐为人们所认识,它已经和人们的生活变得息息相关。它能够部分地代替人进行工作且能达到生产过程的要求,也可以按照一定的顺序、流程和空间操作来完成工件的转移。机械手的出现使实体工厂的工作环境得到很大的改善,还使工业生产机械化和自动化更加高效率。
关键词:机械手;PLC;控制系统;STEP7
Abstract
After entering the 21st century, with the rapid development of China's virtual economy and interference from other industries, the number of workers has been greatly reduced and the efficiency in industrial production is getting lower. For example, the severe shortage of jobs in the south-eastern coastal areas in recent years has led many factories to face collapse. In order to urgently improve labor productivity and reduce the labor intensity of laborers, it is necessary to increase the automation of industrial China. By using manipulators in industrial automation production lines, industrial products are transported from one production line to another, which enables highly automated production, thereby reducing the regular work of industrial workers and increasing productivity.
The robot control system based on PLC designed by this research should realize the moving object according to certain working order, the working order of the manipulator is: present situation, descent, clamping, rising, left shift, descending, relaxation, rising, right shift, in place. And in the operation Engineering, the movement of the manipulator can be either automatic or operated by external input. Taking into account the control requirements and the actual situation, the Siemens PLC S7-300 Series is adopted. The Siemens programming software STEP7 is applied, and on the basis of studying the working principle and process flow of the manipulator, the control scheme is analyzed and I/O is established, and the manual and automatic control subroutine of the manipulator is developed. The simulation software is used to simulate and debug the Manipulator control system to achieve the desired results.
The positive role of manipulator has becoming more and more people's understanding, it has become closely related to people's life. It can partially replace the person to work and can meet the requirements of the production process, follow a certain procedure, time and position to complete the transfer of the workpiece. As a result, it can greatly improve the working conditions of workers and accelerate the pace of mechanization and automation of industrial production.
Key words: robot; PLC; control system; STEP7
目 录
第1章 绪论 1
1.1 研究背景 1
1.2 PLC在工业控制中的应用 1
1.3 机械手国内外研究现状 2
第2章 机械手控制系统的总体方案设计 3
2.1 机械手构成及其工作过程 3
2.1.1 机械手结构组成 3
2.1.2 机械手的工作过程 5
2.2 机械手控制功能要求 6
2.3 控制方案确定 8
2.4 控制结构设计 10
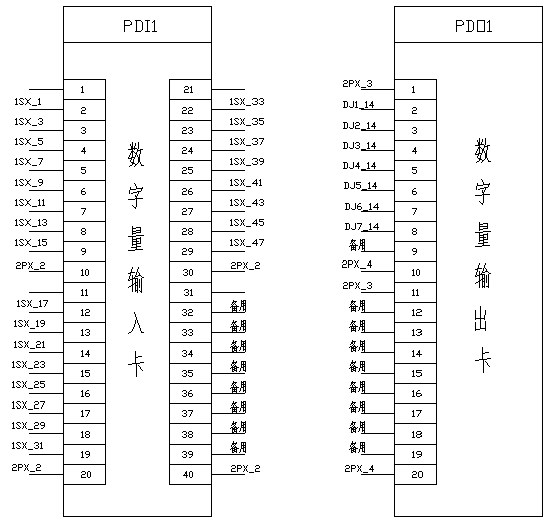
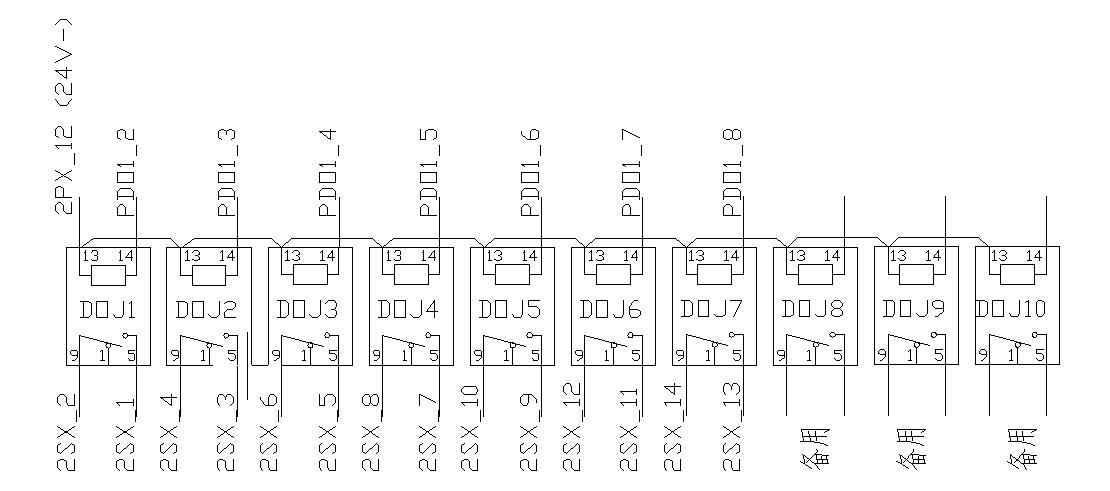
2.5 电气控制结构 10
第3章 机械手控制系统硬件设计 13
3.1 控制系统硬件配置 13
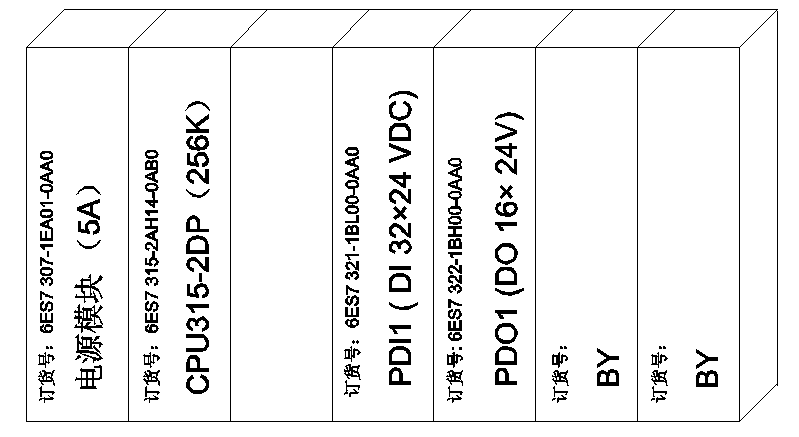
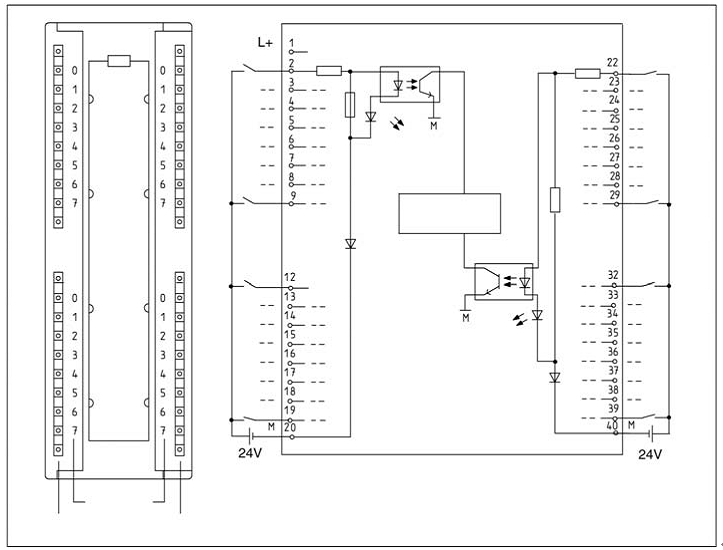
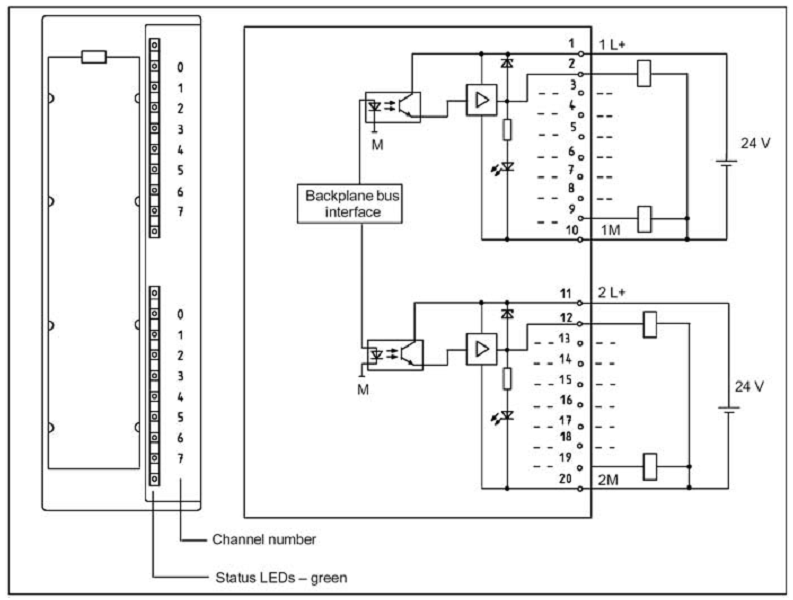
3.1.1 硬件模块选配 13
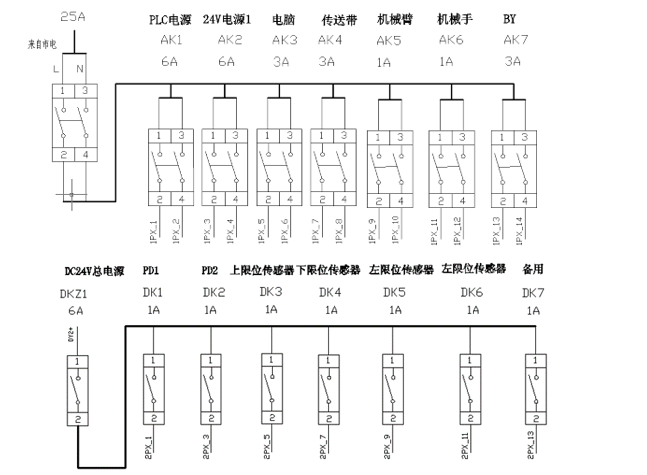
3.1.2 PLC控制柜设计 14
3.2 控制系统硬件组态 17
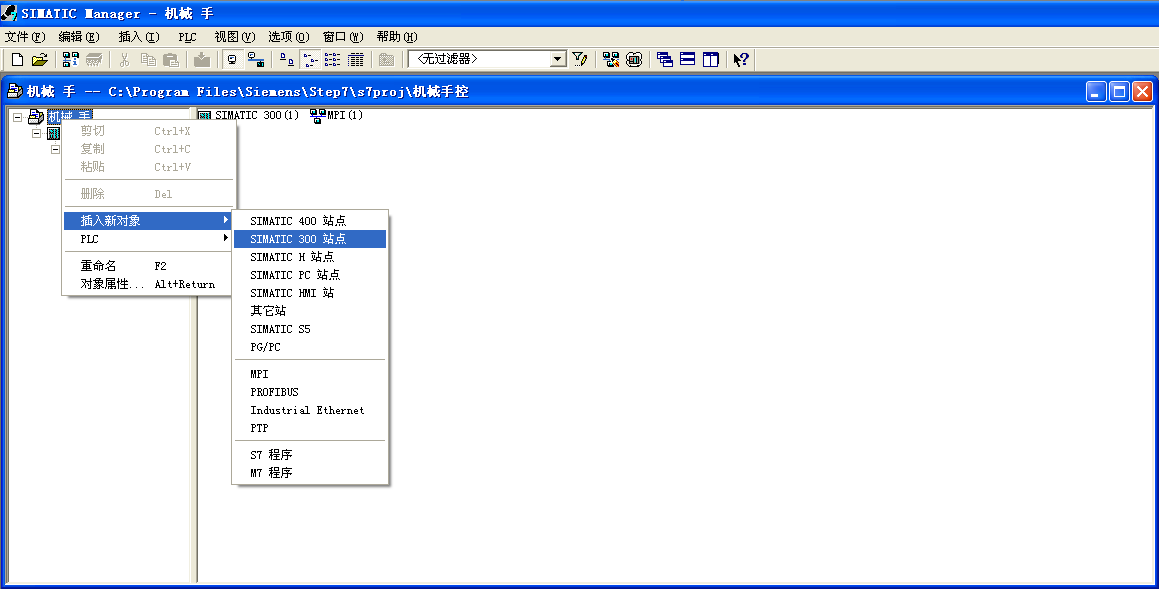
3.2.1 创建项目 17
3.2.2 机架配置 18
第4章 机械手控制系统软件设计及调试 20
4.1 符号表建立 20
4.2 程序设计 21
4.2.1主程序结构设计 21
4.2.2 手动控制程序 25
4.2.3 自动控制程序 25
4.2.4 复位控制程序 31
4.3 控制系统仿真与调试 31
第5章 个人总结 33
参考文献 34
致谢 35
第1章 绪论
1.1 研究背景
在我国随着工业经济的疾速发展,车间工人的工作环境却愈来愈恶劣,工人们的健康受到了很严重的威胁。因此,企业不仅需要考虑怎么提高工人的工作能力,更需要考虑该怎么保障工人们的工作安全。近代以来,科技发展几乎可以用飞速来形容,各种高科技产品、现代化设备争相问世,人类在各种机械运动生产或加工中的参与变得越来越少。在难以操作或者是操作危险的行业中,远程控制的自动化设备会代替操作人员来完成所需的任务。这不仅可以避免对操作人员直接接触一些对身体有害的物质或者被一些重物砸伤,还可以节约企业的生产成本、提高生产效率。比如最近在上海建成且开港运行的上海深水四期自动化无人码头,它是全球规模最大、自动化程度最高的无人码头。这座由上港集团、上海振华重工联合打造的码头被人们称为“魔鬼码头”,共建设7个集装箱泊位。在现场,巨大的集装箱被迅速吊起放下,车流不息,然而繁忙的港口内却连一个人都看不到。到处奔跑着自动导引车,全现场无人、全系统智能,24小时全天候工作。机械手技术是一种被广泛应用于工厂的不的技术之一。它可以根据人们特定的要求进行相应的工作。随着机械手技术的发展,还出现了一些种带有反馈功能的机械手,它在工作过程中可以根据设定条件的变化而自动调整工作流程,从而提高工作质量改善工作效率。机械手在机床加工和电气焊接工业的生产中有着许许多多的应用,随着机械手的参与,工业生产中所耗费的成本大大减少,工业生产的质量及效率也有了显著的提高,促进了现代社会的迅速发展。近年来机械手发展的速度已经是极快了,电力电子技术,计算机控制技术,传感器技术和一些最新技术也逐渐被应用于机械手设计当中。PLC技术在机械手设计中有很多的应用,而且其参与的工业生产过程所得出的结果很令人满意,极大地改善了车间工人们的工作环境,提高了产品的质量,这对自动化技术的发展具有重要而深远的意义。同时,机械手可以使用软件编程来不同地控制不同的生产对象,提高生产效率。目前,在一些高人力工业中,机械手技术基本上被用于减少人力资源和改善控制以最大化工业。该机械手已有40多年的历史,是一种类似机械手的生产设备。它可以完成预加工操作并在各种工业条件下运行。它具有人类智慧和对机械的适应性,对现代经济的发展具有广阔而深远的影响。
1.2 PLC在工业控制中的应用
随着现代科技的发展和国民经济的增长,各个行业各个领域生产方面的需求也在逐渐地加大。然而,由于电气方面的自动化控制仍存在许多限制和不足,不能逐步满足实际生产要求。为了有效地解决这个问题,自动PLC控制技术被提出来了。PLC(可编程逻辑控制器)被称为工业三大支柱之一,它在工业生产中的自动化控制应用大大提高了生产效率,为企业带来了许多经济效益,还促进了工业自动化的发展。
随着PLC在自动控制领域中的应用不断地扩大和改善,尤其是在工业自动控制领域中的参与,扮演着非常重要的角色。如今,大型PLC控制系统甚至可以对比DCS控制系统而不遑多让。PLC主要应用于工业控制,如数控、空调和运输等方面。例如,在数控这一领域,它是应用最多的自动控制系统,起到了必不可少的作用。利用PLC自动化技术提高CNC的精度,实现对每台机床工作的严格控制,确保机床按照预先设定要求的轨迹运行。PLC在数控领域的应用不仅提高了数控系统的精度,而且避免了系统的错误操作,并显着影响了制造产品的质量。例如,在空调领域,自动控制系统在空调领域的应用并不困难,并且仍然可以有效地减少PLC自动化技术的使用。由于空调的运行包括许多控制方法,因此SPS控制技术实现的控制效果最适用于整个控制系统。PLC控制技术的应用可以有效地屏蔽外部因素,为对象设置程序,并执行各种控制程序。因此,其应用可以大大提高空调的运行效率,确保系统能够满足对象的实际需要,使空调的维护时间加长,为用户提供更好的体验。
1.3 机械手国内外研究现状
目前,国内工业机械主要用于机床加工、铸造和锻造等,其数量、品种和性能已不能满足工业生产发展所需的条件。操纵器的运动部件,例如望远镜、摇摄、提升、移动、倾斜等,以及各种类型的张紧机构被设计为根据不同操作要求选择未使用部件的典型通用机构。它可用于制造不同用途的机械手。它易于设计和制造,易于改变工作并扩大范围。此外,应该查看具备触觉和视觉功用的伺服类型,存储器再现类型和机械手,并将其视为整个机械制作系统的主要单元。
在国外的机械制造业当中,工业机械手被更多地使用并且更快地改善。可用于点焊、喷漆等工作,锻造、机床,以及主要人行道装卸,可按预先设定的操作程序规定完成工作,不能应对外界,更改反馈功能不是。视觉功能是在机械手中安装电视摄像机,光学测距仪(距离传感器)和卫星计算机。在工作中,电视摄像机将对象的图像转换为视频信号,然后将其发送到计算机以分析对象的类型,大小,颜色和方向,并执行控制机械手执行任务的命令。总之,传感技术的进步将进一步提高组装机械手的能力。1995年,世界上约有50%的汽车由机械手组装。通过将机械手与灵活的制造系统和灵活的制造系统相结合,从根本上改变当今机械制造系统的手动操作状态,这对于当今机械手的发展变得尤为重要。
第2章 机械手控制系统的总体方案设计
自动化机械手控制系统的涉及面是很广泛的,集合了多种技术为一体。这种系统对比以前的传统人力的手动控制系统有很大的飞跃。在生产效率上,该系统能够使现代工业流水线保持长时间的高速稳定运行;在安全环保这一方面。自动化机械手控制系统可以在一些危险场合实现无人自动控制,以达到安全生产的目的。
2.1 机械手构成及其工作过程
本次研究设计的机械手控制系统大致可以分为两个模块:一个是机械机构模块,它是控制系统的基础部分,直接关系到该系统是否能够进行实际操作,是实现控制功能的前提;第二个是控制自动化模块,它是控制系统的核心部分,实现控制功能的关键。自动化机械手控制系统的工作过程变化非常灵活,且逻辑缜密,机械组成相对简单,其结构、设备组成都比较固定。
2.1.1 机械手结构组成
机械手发展到现在,其组装方式、应用场合、驱动方式等早已千变万化。本次设计所采用的是液压式机械手。
液压式机械手的组成有4个部分,一是手部,它是机械手直接用于抓握和抓住工件或握住特定工具进行操作的部分。它具有模仿人手的功能,但是结构却不像人手,它没有像人一样的手指和手掌,反而像螃蟹的钳子,附着在机械手手臂的前端,通过把需要操作的物体包含起来运动。因此,在实际应用当中需要根据被夹持工件的形状、尺寸、重量、材质、被抓去部位等和它的使用场合来选用或设计具有合适手部结构的机械手。其手部结构的类型大致有这几种:气吸式、钳口式、电磁式及其他型式。钳口式机械手的手部结构由手指和动力传递机构组成。其动力传动机构有多种形式,如斜楔形杠杆式、滑槽杠杆式、弹簧杠杆式、连杆杠杆式、齿轮齿条式等。本次设计所采用的是滑槽杠杆式机械手,其手臂结构图如图2.1所示。机械手的第二大部分就是腕部,把机械手的手部与臂部连接起来,使手部有力的作用点。腕部的好坏主要取决于三点:一是腕部结构紧凑、重量、转动灵活和高密封性。其次是注意手腕和手臂连接的问题,以及每个自由度的位置检测,管道布局和润滑、维护、调整等,以满足工作环境的要求。最后是通向手腕油缸的管子尽可能地手臂的内侧,以便在转动手腕时管子不会扭曲和暴露,并且形状保持清洁。
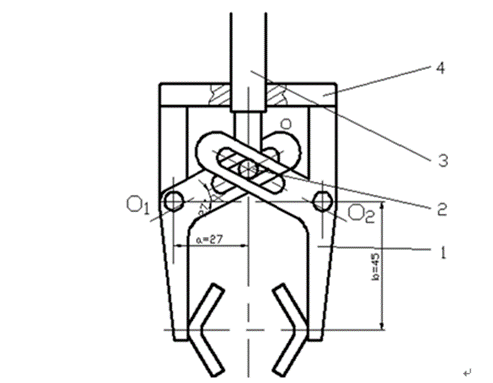
图2.1 机械手手臂结构图
第三大部分是臂部,它是机械手的执行机构,其作用是支撑手和手腕,并且将工件传送到机械手臂的预定位置和方向。机械手腕部结构图如图2.2所示。
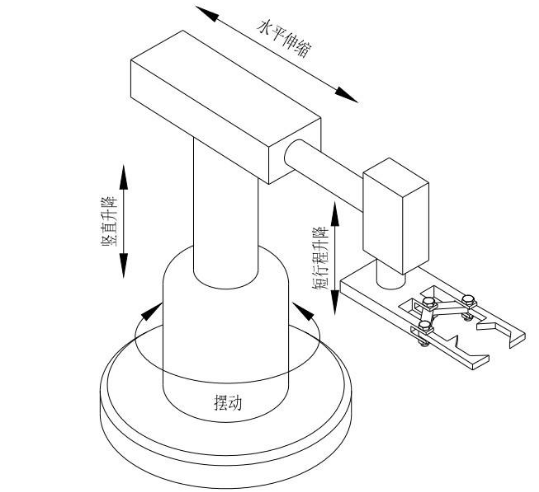
图2.2 机械手腕部结构图
机械手腕部通常以两个自由度搜索,即伸缩臂和提升运动。通过立柱来实现手臂的纵向运动,立柱的横向运动即是手臂的横向运动。通常通过驱动机构和各种传递机构实现各种手臂运动,因此它不止是受工件夹持器重量的影响,还与其接收自身重量的腕部和臂部有关。此外,机械手的工作性能还受到手臂的结构、操作范围、灵活性、抓力和定位精度的影响,因此它必须根据机械手所抓取物体的重量、自由度数、定位精度和移动速度来设计臂的结构。同时,设计时必须考虑臂的受力情况、气缸和导向装置的布置、内管和手腕连接形式等因素。
最后一大块是机械手的驱动装置:液压驱动装置。机械手的液压驱动装置是使用有压力的液油进行动力传递的工作方式。机械手液压驱动装置图如图2.3所示。
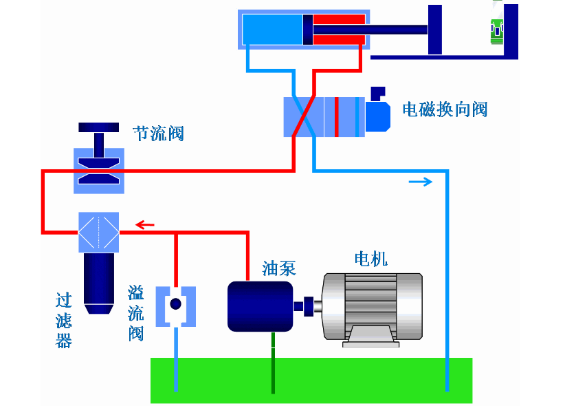
图2.3 机械手液压驱动装置图
发动机驱动油泵释放压力油。这是将发动机输送的机械能转换为油的压力能。加压油通过管道和一些定时调节装置进入气缸并推动活塞杆,使得臂可以被拉伸,提升等动作,是以将油的压力能量转换成机械能。在抓握工件时,臂可以克服的摩擦阻力量和必须保持的抓握量取决于油压和活塞的有效工作范围。
2.1.2 机械手的工作过程
机械手在实际生产过程中的任务是将一个物体夹起、运送、放开、原位。此机械手把工件从D点搬运到C点,在此之后,还有一道工序:利用传送带将部件传送到下一个生产工序当中,即MC处。本次设计的机械手控制系统要求机械手按以下动作顺序动作:原位→下降→夹紧→上升→左移→下降→放松→上升→右移→原位。机械手在通过上、下、左、右限位时,由控制器检测限位开关的通断,来决定机械手当前的动作后的下一步操作,通过驱动系统输出来控制机械手的动作。
机械手结构图如图2.4所示。图中,A缸、B缸、C缸均为动力装置。LS0为原位,LS1为A缸左限位,LS2为A缸右限位,LS3为B缸下限位,LS4为B缸上限位。当A缸收缩到最右端、B缸收缩到最上端、C缸松开时,机械手位于原位。
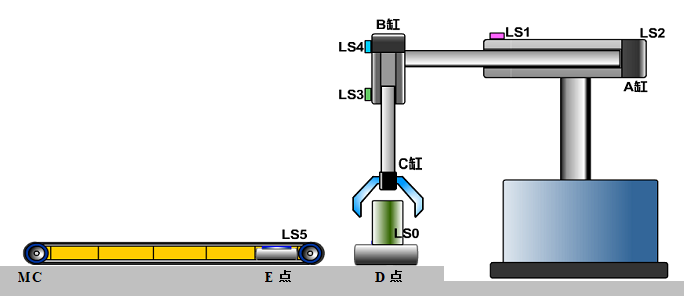
图2.4 机械手结构图
当启动机械手时,B缸下降,在LS3检测到有信号发生时,意味着B缸已经下降到下限位,需要停止下降;然后C缸开始工作,使机械手的手部夹紧物体,一段时间后B缸收缩,直到LS4发出信号(即到达上限位);此时C缸仍处于收缩夹紧状态,A缸然后控制向右边移动,直到LS1发出信号(气缸到达右限位),A缸停止右移,物体位于传送带上面;然后B缸下降,直到LS5发出信号时(气缸到达下限位),B缸停止下降,同时C缸松开物体,传送带开始运行。然后B缸回到上限位,A缸回到右限位,延时一段时间后传送带将停止工作,完成一次搬运任务。机械手控制流程图如图2.5所示。
2.2 机械手控制功能要求
机械手控制功能要求所设计的机械手能够按照一定的工作顺序完成对物体的移动。该工作顺序为:原位、下降、夹紧、上升、左移、下降、放松、上升、右移、原位。其控制方式既可以自动控制(启动之后,机械手按照程序运行,不需要在进行操作),也可以手动控制(通过控制按钮实现对机械手的每个阶段进独立控制)。此外在工作过程中,当机械手运行出现故障时,能够立即停止工作,等待检查。机械手的运动情况可以分为三种:一种是自动运行,二是手动运行,三是故障停机检测。
(1) 自动运行
以上是毕业论文大纲或资料介绍,该课题完整毕业论文、开题报告、任务书、程序设计、图纸设计等资料请添加微信获取,微信号:bysjorg。
相关图片展示: