基于神经网络的船舶辅助驾驶系统研究毕业论文
2020-02-19 07:51:55
摘 要
《中国制造2025》计划的提出表明,我国加强了对智能船舶发展的重视。而目前我国在船舶领域方面的技术发展水平十分有限,海上航行的安全性和稳定性却是无法得到保证的。尤其是海上或内河运行的船舶在处于复杂多变的环境下,常因为偏离航向,无法实现精准的航向控制而引发一些安全问题。
本文以海上或内河运行的三自由度船舶模型为主要研究对象,由于船舶模型的参数会随着外界条件,如航速、自身重量等的改变而发生变化,具有非线性的特点。为了使船舶在复杂的外界条件变化下,仍能保持良好的航向控制性能,针对目前船舶自动舵的国内外研究现状,本文基于机器学习理论,以反向传播神经网络训练算法为工具,将BP神经网络和船舶运动模型相结合,把船舶运动模型的实际输入量,作为BP神经网络的期望输出,并将船舶模型在该输入量作用下而产生的输出值返回给BP神经网络作为样本输入数据,通过对运动模型实时输入的期望值和输出的样本输入数据进行在线学习,以适应可能因自身航速和外界条件变化而导致的模型参数变化,建立了比较理想的船舶操纵系统逆数学模型,可使船舶操纵系统能够适应较为复杂的海况,实时输出最佳的操纵策略,即下一时刻应操纵的方向舵舵角值大小,以满足复杂的航向变化,并最终在MATLAB软件上实现了程序编写和仿真验证。仿真结果表明基于BP神经网络建立船舶操纵逆模型的航向控制方案在航向控制性能方面有较为明显的优越性。
关键词:反向传播算法;船舶航向控制;神经网络逆控制;在线学习
Abstract
The proposal of the "Made in China 2025" plan shows that China has strengthened its emphasis on the development of smart ships. At present, China's technical development level in the field of ships is very limited, and the safety and stability of maritime navigation cannot be guaranteed. In particular, ships operating at sea or inland rivers are often in a complex and volatile environment, often failing to achieve precise heading control due to deviation from heading and causing some safety problems.
In this paper, the three-degree-of-freedom ship model operating at sea or inland river is the main research object. Because the parameters of the ship model will change with the changes of external conditions, such as speed and weight, it has nonlinear characteristics. In order to make the ship maintain good heading control performance under the complicated external conditions, this paper is based on the theory of machine learning and the back propagation neural network training algorithm as a tool to BP. The neural network is combined with the ship motion model to take the actual input of the ship motion model as the expected output of the BP neural network, and return the output value generated by the ship model under the input quantity to the BP neural network as sample input data. Through online learning of the expected value of the motion model input and the sample input data of the output, to adapt to the changes of the model parameters that may be caused by changes in its own speed and external conditions, an ideal inverse mathematical model of the ship control system is established. The ship control system can adapt to more complex sea conditions and output the best steering strategy in real time, that is, the rudder angle value of the rudder to be operated at the next moment to meet the complex heading changes, and finally realize the programming and simulation on MATLAB software. The simulation results show that the heading control scheme based on BP neural network to establish the ship maneuver inverse model has obvious superiority in heading control performance.
Key Words: backpropagation algorithm; ship heading control; neural network inverse control; online learning
目录
摘要 I
Abstract II
第1章 绪论 1
1.1 课题研究背景和意义 1
1.2 国内外研究现状 2
1.2.1 船舶航向控制研究现状 2
1.2.2 神经网络研究现状 4
第2章 三自由度船舶运动模型 5
2.1 主要运动参数 5
2.2 重心运动轨迹方程式 6
2.3 运动一般方程式 6
2.4 水动力方程式 6
2.5 航向控制分析 7
2.6 本章小结 8
第3章 BP神经网络 9
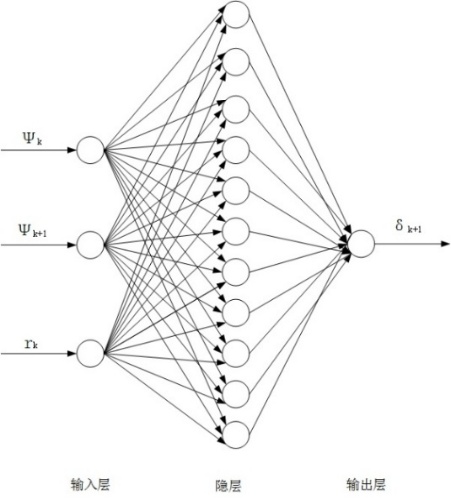
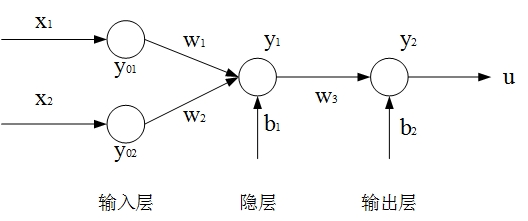
3.1 BP神经网络结构模型 9
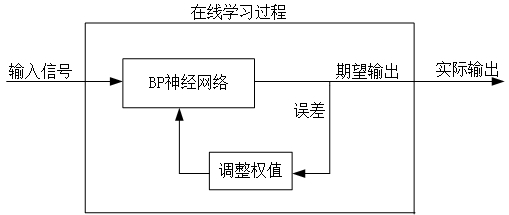
3.2 BP神经网络学习过程 10
3.3 反向传播算法原理 10
3.4 BP神经网络的简要分析 12
3.4.1 BP神经网络的特点 12
3.4.2 BP神经网络的优点及其局限性 13
3.5 本章小结 14
第4章 航向神经网络控制器设计 15
4.1 基于BP神经网络的船舶操纵逆模型 15
4.1.1 网络模型输入量和输出量的确定 15
4.1.2 网络模型参数确定 16
4.1.3 BP神经网络逆模型结构图 16
4.2 船舶运动模型参数的确定 17
4.3 方案的比较与选择 18
4.4 控制方案的确定和分析 21
4.5 本章小结 22
第5章 系统仿真与结果分析 23
5.1 方案一的编程和仿真实现 23
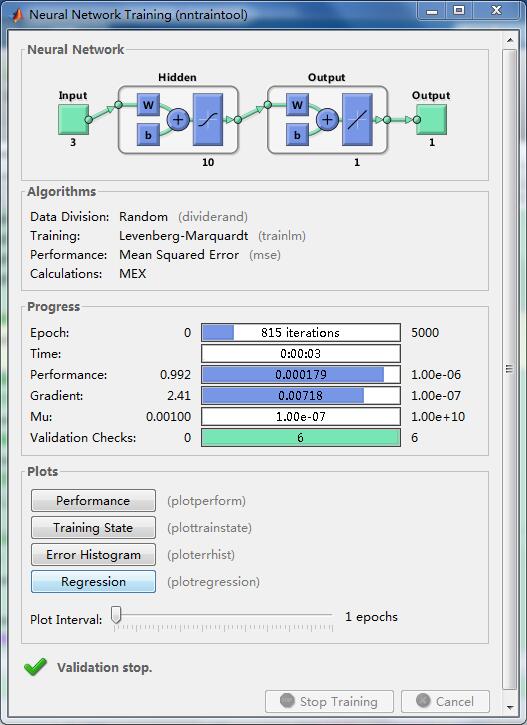
5.1.1 一般BP神经网络的编程实现 23
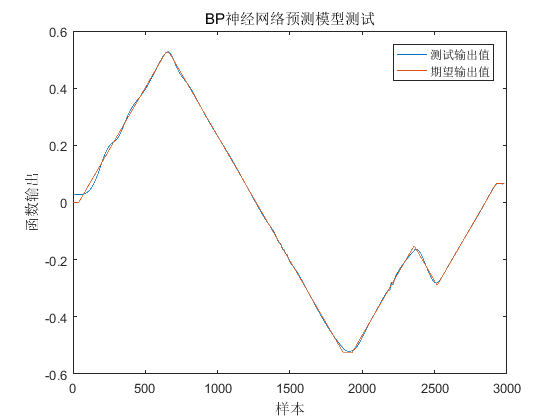
5.1.2 方案一的程序编写和仿真结果 23
5.1.3 仿真结果分析 25
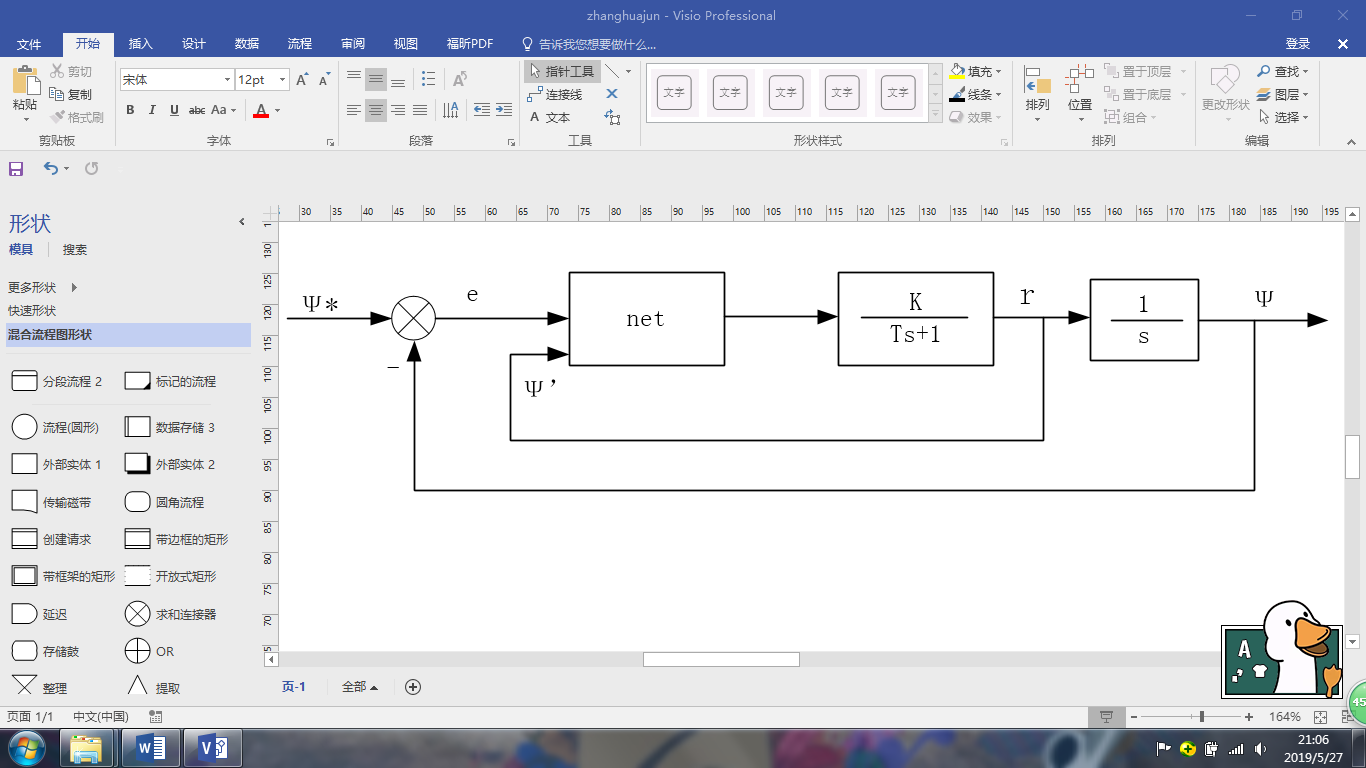
5.2 方案二的模型搭建和仿真实现 26
5.2.1 方案二的模型搭建和仿真实现 26
5.2.2 仿真结果分析 30
5.3 本章小结 30
总结与展望 31
参考文献 32
致谢 34
第1章 绪论
1.1 课题研究背景和意义
如今,第四次工业革命正在全球各国土地上轰轰烈烈的展开着,而这次改革风暴依托的便是经济全球化不可逆转的大趋势,各国间的经济发展开始有了更多的合作机会,各国的贸易交流也变得愈发频繁了起来。与此一同发展的便是物流运输行业的崛起,海陆空运输方式与时俱进的均有了新的发展。其中,作为十分环保、经济、有效和便利的国际货物运输方式之一的海上货运,深受一些临海国家的青睐,甚至可以说是个别国家在考虑货物运输方式时的第一选择,在国际贸易中占有不可或缺的地位,无法轻易被替代。因此,积极的推动航海科学技术的发展和自主提升航海装备水平早已成为世界上许多国家的共识,当然,中国也不会例外。作为全球的海洋大国之一,中国的国土有许多临海的存在,面对智能船舶技术快速的发展速度,我国迫切的需要在智能船舶运动控制技术上做出一些突破。
众所周知的是,水面无人船已经发展到了一定高度水平,也完全可以实际的完成某些具体工作,如对水质进行检测、在海上探测物矿、构建完整的海洋信息系统和做海洋测绘等[1]。其中,由水面无人船(USV)实际具体完成的一些工作有:2008年,“天象一号”水面无人探测船,曾在青岛的奥帆赛比赛期间提供了辅助性的气象保证服务;2011年,由武汉航道局设计研发的远程遥控测量船顺利的完成了实地的测绘,并于2015年年初与某军工企业谈了合作项目,成功的把科技成果转换成了实际的生产力技术;2013年,珠海著名企业云洲公司研发的无人船有了重大突破,在水质检测上有了实际的应用,并且成功从受污染的河流中采集到水质数据,为日后的无人船水质检测技术发展奠定了基础;2018年10月份,同样是云洲智能公司研发的导弹无人艇进行了导弹飞行的实验,并且成功的命中了目标,是导弹无人艇技术研发的另一重大科技成果;2018年春晚上,巨大的海洋无人艇带着一群小型无人艇变换列阵,穿越港珠澳大桥,给许多人留下了深刻影响,是在全国观众面前首次展示的我国无人艇技术的一个侧影[2]。
相信在不久的以后,随着对水面无人船的不断深入研究,未来的船舶一定可以发展到,在远程操控下,无人船将单独的穿越海上对货物进行运输。如果一旦船舶上真的一个人都没有,这代表着可以有更多的货物被运载,一趟海运所产生的收益利润也将更大,甚至,偶尔因为船上工作人员操作失误发生的意外事故也得以避免。同时,船舶对航向控制也会更加精准,由船舶偏离设定航向而引发的一些安全性问题也得到了解决。
本文在改善船舶航向控制性能上,提出了基于BP神经网络建立一个船舶操纵逆模型的设想,并根据和船舶运动模型的结合,将船舶运动模型的实际输入量作为神经网络的训练期望输出量,同时,将船舶运动模型在该输入量作用下产生的输出量返回给神经网络,当作其样本输入量,然后,通过对实时采集的样本训练数据进行在线学习,以适应自身航速和重量导致的系统模型变化和外部环境条件变化导致的系统参数变化,并成功建立了较为理想的船舶操纵逆模型。最后,在MATLAB仿真软件上对该航向控制设计方案进行了模拟仿真,仿真结果表明了该方案具有可实施性和优越性,故该船舶辅助驾驶设计方法航向控制性能理想,符合课题设计要求。
1.2 国内外研究现状
1.2.1 船舶航向控制研究现状
目前,对船舶航向控制的研究主要是包含航向保持和航向改变两个方面。一般而言,船舶运动控制系统里,用于航向控制的就是船舶自动舵系统,船舶自动舵的最主要功能就是航向保持和航向改变。自智能船舶发展至今,船舶自动舵一直都是十分关键的研究课题之一,它的性能好坏对船舶航行有着巨大的影响,无论是从安全性还是从经济性上考量,都有着十分重要的地位。
相对而言,我国对智能船舶运动的研究还处在十分基础的水平,虽然也取得了一些不错、值得肯定的成绩,但与国外这方面的研究技术水平相比较,仍存在许多不足的地方[3]。从很久以前到现在,面临复杂多变的海况,仍能使船舶保持良好的操纵性能一直都是一代又一代研究人员不懈追求的奋斗目标[5]。
PID自动舵是船舶自动舵发展历史上的一大重要成果,曾于上个世纪50年代首次面世的“北辰”自动舵就是PID自动舵的重要代表之一。PID控制器有着经济性好和组成结构简单的特点,因此,哪怕是现在,仍然有很多的船舶因为各种因素的考量,装配的还是PID自动舵。但是,PID自动舵在设计的时候,需要十分明确的知道船舶数学模型才可以。然而,这一点很难做到,是因为船舶一般是运行在极为复杂的海况里的,故船舶的运动特性并非是一成不变的,它的模型参数一般都会随着自身航速、重量等的变化而有所不同,因此用于船舶航向控制的船舶运动模型是非常难以用具体数学方程式来永久表示的。一般的常规PID自动舵是无法满足上述要求的,因为PID控制器的参数需要一直适应该变化,而船舶上的驾驶人员很难也不可能做到即时的调整其参数,因此,PID自动舵的航向控制的结果必然不可能很理想,特别是在面临航行的海况十分复杂的情况下,更是如此[4]。
随着船舶自动舵技术的发展,又一巨大研究成果面世,那就是自适应自动舵。与传统的PID自动舵相比,毫无疑问的是,自适应自动舵的控制性能是更为优越的,对航向控制的精准性有了比较大幅度的提升,同时,对一些人力不可控的外在环境条件因素,如风、浪等,有了一定的补偿作用,使自动舵可以在更多复杂的气候条件下较正常的工作。2002年,杨盐生等人针对了船舶运动航向状态有一定的可预测性这一特点,提出了一种适用于非线性船舶航向系统的输出反馈自适应方法[7];2005年,福森等人针对非线性船舶运动方程问题,选择构造一些中间虚拟控制量来逐步的回推控制规律,得到了一个船舶航行自适应控制器[6];2010年,李铁山等人则是采用了模糊系统来逼近具有不确定性的模型,并提出了一种自适应模糊跟踪算法,该算法的优点是实现起来简单和计算量不大[8]。虽然在一定范围内,自适应自动舵可以十分有效地对船舶航行进行自动控制,但是自适应方法的基础是船舶的环境干扰模型,然而,海况的复杂多变性和未知海域的存在,并不可能对所有的环境干扰面面俱到的考虑到,因此,自适应自动舵依旧无法适应千变万化的运行环境,更加无法均给出最佳的调节策略方法。
船舶运动控制技术发展至今,当前,最热门的控制策略是智能式控制,它是可以自学习、自适应的控制方式。一般,智能式控制可分为以下几大类:神经网络控制和模糊逻辑控制等。从上个世纪90年代起,船舶自动舵的研究就开始采用神经网络控制这个控制方法[4]。1993年,Witt等人使用简单的人工神经网络控制模型完成了航向的保持控制实现,神经网络控制在船舶运动控制上的应用研究就此正式拉开序幕;1997年,张尧等人就开始尝试着将人工神经网络的控制算法直接应用于船舶的运动控制上,该控制算法的优点是不需要对系统特别的进行离线训练,同时还可以控制船舶系统和它所处的随机环境之间的一些交互作用关系;2003年,罗伯特等人率先将航迹保持问题做出了更详细的划分,分为航向保持和航线保持,分别对这两个部分进行控制,就此提出了一种基于非线性模糊算法设计的航迹保持自动舵[9];2014年,张艳等人创造性地使用了一种带有补偿效益的广义预测控制算法,设计了一种应用于船舶航向保持的神经网络预测控制器[10]。
随着目前国际海事组织提出的战略计划的提出,智能船舶的发展地位又有了极大的提升,它明确表示了,用于航向保持、航向改变的自动舵技术的未来发展趋势是使船舶操纵更加智能化[11]。
1.2.2 神经网络研究现状
对神经网络进行表述的语言十分之多,其中,比较受广泛认同的是,它是一种模拟生物神经元网络,由若干个神经元组成,通过并行处理信息的连接方式构成的网络,它对信息的处理方式是与生物神经网络对神经元突触信号的处理方式是十分类似的[12]。而且,人工神经网络有着十分强大的处理信息的能力,它存储信息的方式是通过各层神经元之间的分布式物理连接方式来实现的。
人工神经网络处理信息、建立网络的方式是通过对大量的输入样本数据和期望输出信号的分析学习得到的,在掌握了输入输出信息的线性或非线性映射关系后,还能够对新的输入数据进行分析和计算,得出输出结果,因此,我们常说人工神经网络具有自学习特性,而这种学习适应的过程可被称作为“训练”过程。我们可形象的将神经网络常比作“黑箱”,用来表述一些无法用理论准确描述,但输入量和输出量确实是存在并遵循着某种特殊规律的数学模型。
理论上,要想得到比较理想的神经网络,一般需要以大量的训练数据集和足够多的隐层神经元数目作为其支撑,若满足这两个要求,毫不夸张的说,神经网络甚至可以无限逼近任意一种非线性输入输出关系。在处理复杂或非线性问题上,作为一种经验模型,神经网络一直都有着十分广泛的应用。
自20世纪40年代起,人工神经网络就此横空出世,在那个年代引起了轩然大波。1943年,标志着人工神经网络起源的是MP神经网络数学模型的出现,它是由美国心理学家麦卡洛克和数学家皮茨一同提出的 [13];1969年,S.Grossberg等人提出了自适应谐振理论模型,是竞争性学习的重要代表网络。
在此之后的20世纪80年代,神经网络的研究加快了发展速度,众多著名成果都是在这段时期被提出的。1982年,John Hopfield十分有创造性地模拟了人脑生物神经元模型,提出了Hopfield模型,为之后的研究学家提供了新的研究思路;1986年,Rumelhart和McClelland等人天才般的提出了反向传播神经网络的概念,反向传播算法的影响之深远,直至现在,都有着相当广泛的应用,BP神经网络也是本文选择建立船舶逆模型的工具;1988年,Broomhead结合了前人的研究成果,在原有的理论基础上,采用了原理化的方法,提出了径向基函数网络这个新型神经网络,又称RBF神经网络。
随着神经网络不断的深入研究,以后的发展趋势也必然会是继续的扩大神经网络结构的应用,同时,促进信息科学和生命科学相融合,也可以进行与其他智能方法的融合研究。
第2章 三自由度船舶运动模型
本文讨论的被控对象是三自由度的船舶运动模型,指在水平面上运动的船舶。对该船舶运动模型的航向控制则是研究航向的保持与改变,不涉及到深度的变化。此时,船舶水平面上运动的航向控制的性能好坏体现的便是三自由度船舶模型的操纵性优劣。
在研究航向控制问题时,首要关键就是要明确船舶运动数学模型。然而,三自由度船舶运动过程是极为复杂的,运动特性也并非一成不变,容易受到运行环境的影响。
以上是毕业论文大纲或资料介绍,该课题完整毕业论文、开题报告、任务书、程序设计、图纸设计等资料请添加微信获取,微信号:bysjorg。
相关图片展示: