纯电动轮毂电机越野车动力系统匹配设计毕业论文
2020-02-18 10:35:56
摘 要
节能、环保和安全是如今汽车行业的三大主题,纯电动汽车具有低排放,比功率高的优点,同时轮毂电机驱动汽车结构简单、效率高、转矩独立可控,而且可实现底盘智能化,是未来汽车发展的方向之一。
本文以某越野车为研究对象,分析其行驶的道路状况,在提高整车动力性需求以及整车空间布置等约束下,采用分布式轮毂电机独立驱动结构。然后根据动力性要求,对动力系统进行选型和参数匹配,确定动力系统关键部件的参数。具体过程如下。
在认真研究了整车的设计要求后,根据汽车加速性能,爬坡性能,最大车速等确定了整车所需的最大功率,而后对驱动电机进行选型和匹配,选择了四个额定功率35kw的轮毂电机,根据续航里程要求计算确定了一组600V,178Ah锂离子动力电池。轮毂电机的减速比为5。至此动力系统关键部件参数匹配完成。
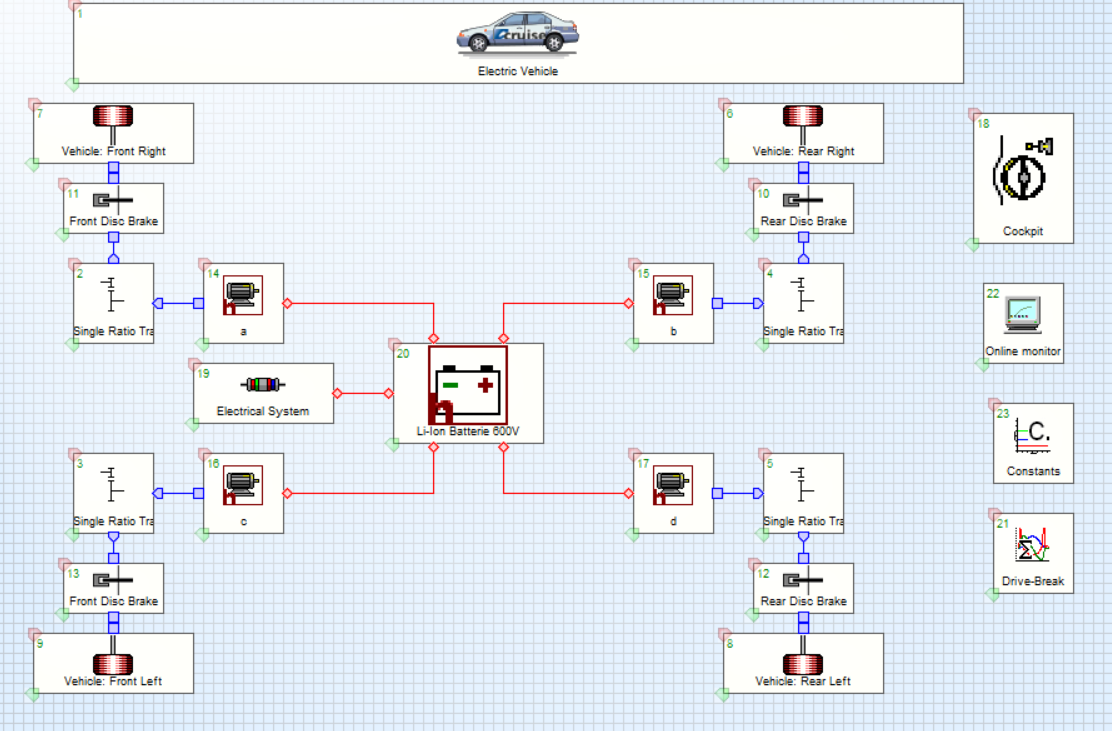
后续建立纯电动越野车的仿真模型,在Cruise软件中将所计 算出的传动比、电池、电机等参数输入模型,对车辆各项性能设置仿真任务,完成汽车动力性能(加速度,最高速度,续航里程等)仿真计算。
最后对仿真结果进行了综合分析,仿真结果显示:最高车速能达到126km/h,以20km/h行进能爬68.9%坡度的坡,0-80km/h加速时间为7.4s,以40km/h速度能行驶260km。动力性能满足设计要求。
关键词:纯电动汽车,轮毂电机,参数匹配,Cruise
Abstract
Energy saving, environmental protection and safety are the three themes of today's automotive industry. Pure electric vehicles have the advantages of low emissions and high specific power. At the same time, the hub motor drives the car with simple structure, high efficiency, independent torque control and intelligent chassis. advantage. Pure electric wheel hub motor can meet the requirements of energy saving and environmental protection, and is one of the future development directions of automobiles.
In this paper, an off-road vehicle is taken as the research object, and the road conditions of the road are analyzed. Under the constraints of improving the power demand of the whole vehicle and the space arrangement of the whole vehicle, the distributed wheel hub motor independent driving structure is adopted. Then according to the dynamic requirements, the power system is selected and matched with parameters to determine the parameters of the key components of the power system. The specific process is as follows.
After carefully studying the design requirements of the vehicle, the maximum power required by the vehicle was determined according to the vehicle acceleration performance, the climbing performance, the maximum vehicle speed, etc., and then the drive motor was selected and matched, and four rated powers of 35kw were selected. The hub motor, based on the cruising range requirements, determines a hybrid 600V, 178Ah lithium-ion battery. The reduction ratio of the hub motor is 5. At this point, the matching of key components of the power system is completed.
Subsequently establish a simulation model of pure electric off-road vehicle, input the calculated gear ratio, battery, motor and other parameters into the model in Cruise software, set simulation tasks for various performances of the vehicle, and complete the vehicle dynamic performance (acceleration, maximum speed). , cruising range, etc.) simulation calculation.
Finally, the simulation results are comprehensively analyzed. The simulation results show that the maximum speed can reach 126km/h, and the slope can climb 68.9% slope at 20km/h. The acceleration time of 0-80km/h is 7.4s, at a speed of 40km/h. Can drive 260km. Dynamic performance meets design requirements.
Keywords: pure electric vehicle, hub motor, parameter matching, Cruise
目录
摘要 I
Abstract II
第1章 引言 1
1.1研究背景及意义 1
1.2国内外研究现状 3
1.2.1 轮毂电机研究现状 3
1.2.2动力系统匹配现状 4
1.3研究内容与研究方法 5
第2章 四轮独立驱动纯电动越野车动力系统的选取 6
2.1三种四轮驱动纯电动结构方案 6
2.2动力系统结构方案的选择 8
第3章 动力系统参数匹配 9
3.1车辆基本参数 9
3.2驱动电机的选型与参数确定 10
3.2.1驱动电机的选型 10
3.2.2驱动电机的参数计算 11
3.3动力电池参数确定 17
3.4 本章小结 19
第4章 四轮独立驱动纯电动越野车整车建模 20
4.1选择建模仿真软件 20
4.2整车模型的搭建 20
4.2.1整车模块的搭建 20
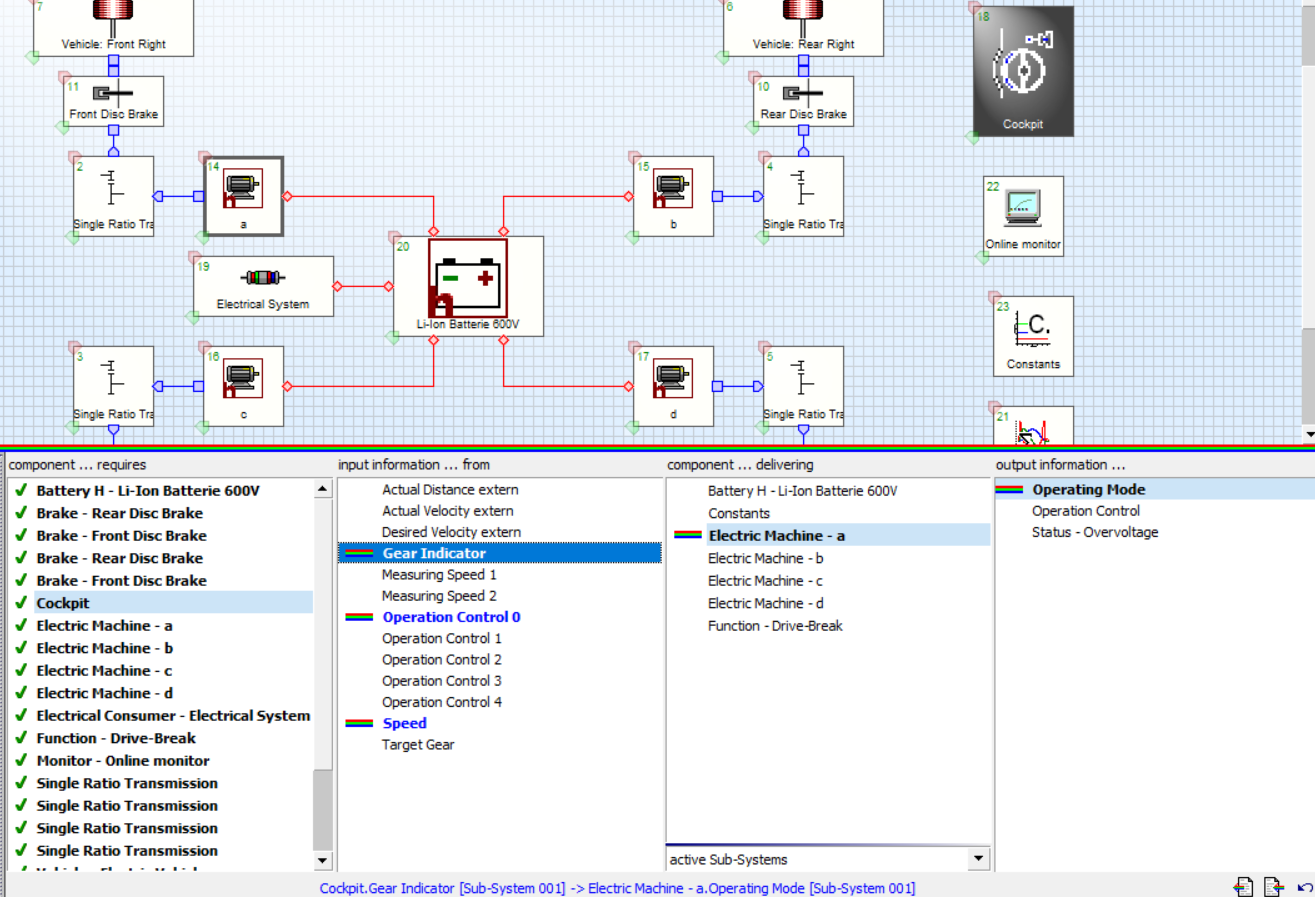
4.2.2整车各部件信号连接 21
4.3整车各模块参数设置 21
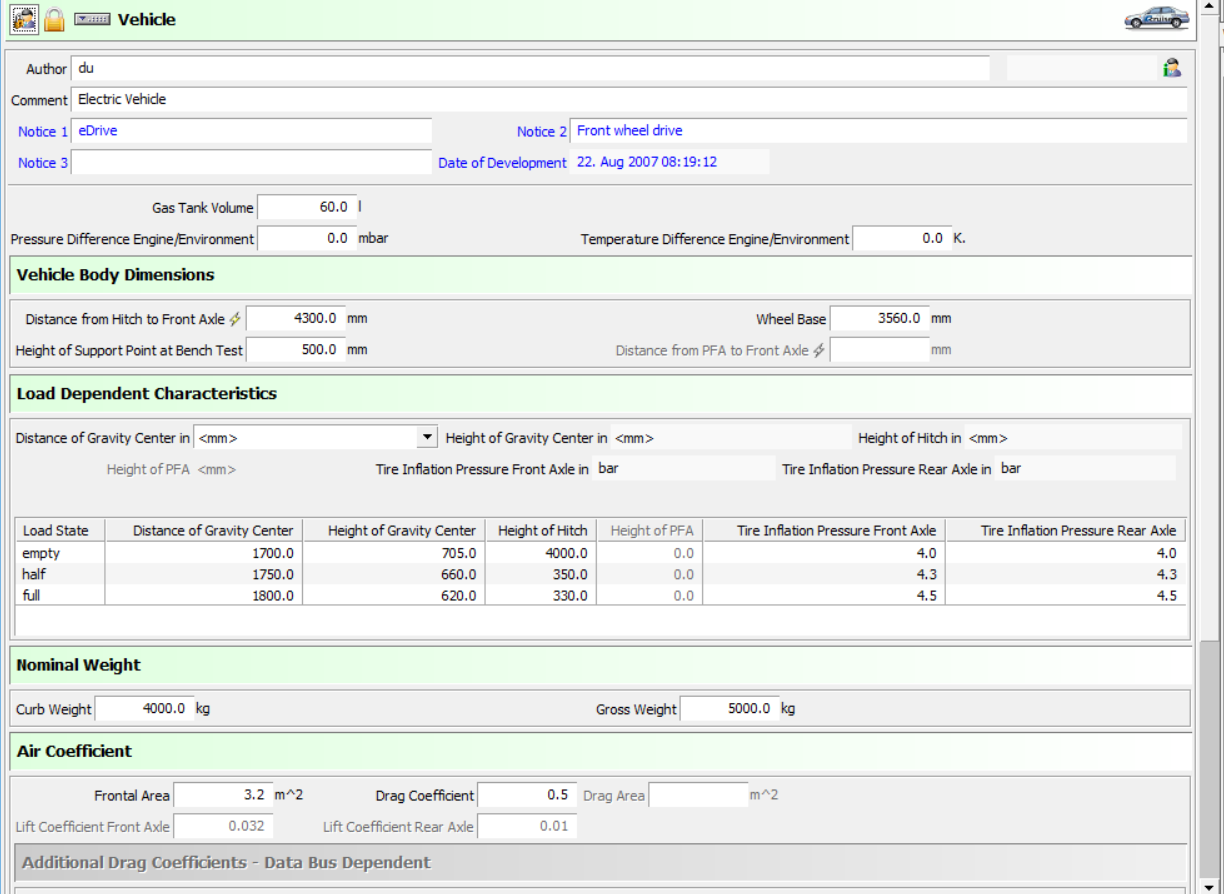
4.3.1整车模块参数设置 22
4.3.2动力电池参数设置 22
4.3.3电机相关参数设置 23
4.4仿真结果分析 24
4.5本章小结 27
第5章 总结与展望 28
5.1全文总结 28
5.2展望 29
参考文献 30
致谢 31
第1章 引言
1.1研究背景及意义
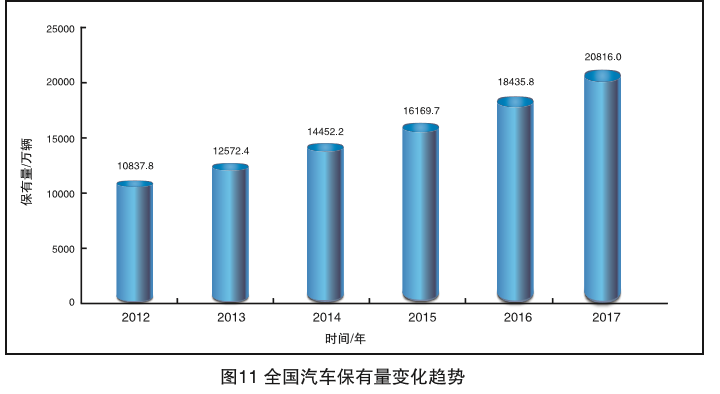 随着中国经济社会的发展和人们消费水平的快速提高,国内的汽车市场快速扩大,汽车保有量一直呈现快速增长的趋势,图1-1为2010-2017年全国汽车保有量变化图。2018年中国汽车产销量分别为2780.9万辆和2808.1万辆,与2017年同期相比分别下降4.2%和2.8%,汽车产销量出现下降的趋势。预计在最近几年内中国汽车保有量将达到饱和[1][2]。
随着中国经济社会的发展和人们消费水平的快速提高,国内的汽车市场快速扩大,汽车保有量一直呈现快速增长的趋势,图1-1为2010-2017年全国汽车保有量变化图。2018年中国汽车产销量分别为2780.9万辆和2808.1万辆,与2017年同期相比分别下降4.2%和2.8%,汽车产销量出现下降的趋势。预计在最近几年内中国汽车保有量将达到饱和[1][2]。
图1-1 2010-2017年全国汽车保有量变化图
在过去的很长一段时间内,汽车工业的发展极大的促进了我国经济的高速发展,但随着人们环保意识的加强,对汽车产生的负面环境问题也在持续关注。在资源与环境压力日趋加重的今天,传统汽车产业带来的弊端与经济社会的可持续发展、绿色环保的发展理念之间的冲突不断。由此,新能源汽车作为节能环保的主力重新受到人们的关注。各国政府相继出台政策扶持新能源产业的发展,继而带动相关企业投入新能源汽车的研发工作[3]。
新能源汽车在最近几年内取得的突破显著。受燃油价格,以及购车限制的影响,消费者对新能源汽车的青睐逐渐加强。我国新能源汽车市场呈现爆发式增长。2017年,中国新能源车保有量为153万辆,占汽车总量的0.7%。2018年我国新能源汽车产销量分别为127万辆和125.6万辆,比2017年同期分别增长59.9%和61.7%。图1-2为2011-2018年我国新能源车产销量变化,图1-3为2011-2018年我国纯电动汽车产销量变化[3]。
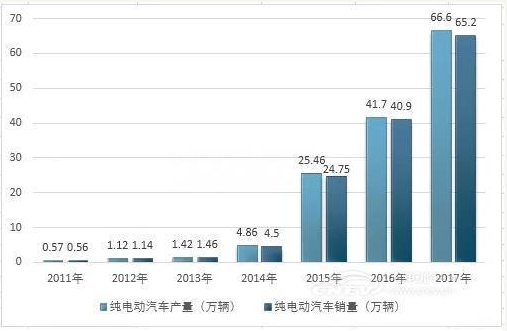
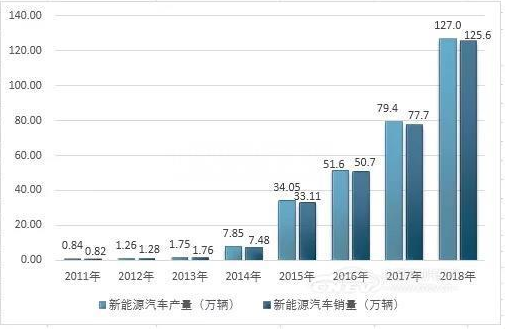 图1-2 2011-2018年新能源汽车产销量图
图1-2 2011-2018年新能源汽车产销量图
图1-3 2011-2017年纯电动汽车产销量图
在新能源汽车中,纯电动汽车正是新能源车里面的佼佼者,其采用动力电池组及电机驱动动力,它工作时不产生废气,可以说几乎是“零污染”。行驶时的低噪音也是其优点之一。纯电动轮毂电机汽车是纯电动汽车的一种,其采用动力电池和轮毂电机驱动。轮毂电机就是将汽车的“制动系统、传动系统、动力系统”集成到一起设计的电机。由于它采用轮毂驱动的形式,省略了传统汽车所需的复杂机械传动系统,这使得汽车底盘的布置更加灵活。同时,可以和不同的电动汽车电源供电系统进行搭配。汽车的每对轮毂是可以独立控制的,汽车底盘的主动控制可以通过对驱动电机的控制得以实现。又由于驱动轮(两个或多个)的驱动力是可以进行单独调节的,所以可以通过分析各对轮的转矩利用率,选择其中最经济的驱动方式[4]。这是新能源车发展的一个很好的方向。
越野车具有动力性强、整车通过性好等优点,但其对能源消耗量大,经济型较差。将新能源技术运用到越野车上可以弥补它的一些不足,对提高经济性帮助较大。所以在不丧失动力性优势的前提下,合理的匹配纯电动越野车的动力系统十分关键。采用轮毂电机四驱控制适用于越野车在各种极限工况下的使用要求,对提升纯电动越野车的动力性帮助明显。
1.2国内外研究现状
1.2.1 轮毂电机研究现状
国外轮毂电机驱动技术的应用主要体现在两个方面:一是轮胎生产商和汽车零部件生产商研发开发集成化电机系统;二是各整车厂与轮毂电机生产相关公司联合开发电动汽车和混合动力汽车[4]。
国内对于轮毂电机的研究多集中于高校与各汽车研发中心,产品主要应用于电动汽车和混合动力汽车,与此同时,国内自主品牌汽车厂商也纷纷开始推出了自己带有轮毂电机技术汽车产品,国内的汽车商虽然能够生产电动汽车,但是对于轮毂电机驱动技术的研究不够成熟,尤其是在高转矩轮毂电机开发方面,与国外先进产品有较大的差距。虽然目前轮毂电机还处于小范围试验阶段,但被业界很多人看作是未来新能源汽车驱动解决方案,如果能解决电机控制上技术难题,轮毂电机驱动技术在未来的新能源车中拥有比较广阔的前景。
目前国际上著名的轮毂电机生产厂商有英国的Protean电机公司、加拿大的TM4公司、著名的轮胎生产商米其林公司。美国福特汽车公司联手国际著名汽车零部件厂商舍弗勒开发的eWheel Drive轮毂电机驱动汽车。eWheel Drive轮毂电机驱动系统将独立的电动机集成于两个后轮毂中。舍弗勒的轮毂电机采用水冷设计,功率和转矩都做做到很大。英国Protean轮毂电机已与多家整车厂商合作研发了20多种轮毂电机[5][6]。在国内,湖北泰特轮毂电机湖北泰特机电有限公司也是国内比较早布局生产轮毂电机的企业。其制造的e-Traction系列轮毂电机,将轮胎、轮毂、永磁同步外转子、定子、逆变器、压盘等部件集成在车轮内,轮毂电机峰的值输出扭矩可达5000-10000Nm,最高转速达到500r/min。1-4为福特eWheel Drive汽车,图1-5为Protean Drive 轮毂电机结构图。
轮毂电机结构图。
图1-4福特eWheel Drive汽车

图1-5 Protean Drive轮毂电机结构图
1.2.2动力系统匹配现状
对于动力系统匹配优化,国内外研究主要采用软件模拟仿真、台架性能模拟实验、样车道路测试实验结合的方法。软件模拟仿真技术是指设计人员在对动力系统部件参数匹配时,利用专业软件将系统参数及控制策略输入软件中,模拟分析整车的性能,对动力系统进行优化,ADVISOR和Cruise等是主流仿真软件。台架实验和道路测试是后续验证测试方法,能够全面的反应整车性能和部件的可靠性,便于后期改进优化。
1.3研究内容与研究方法
本文研究就是以轮毂电机为基础的纯电动越野车动力系统匹配设计,选取合适的性能参数,使其具有良好的动力性以及经济性,并能满足越野车复杂工况下的使用要求,具体研究方法如下:
(1)研究纯电动轮毂电机驱动形式的越野车动力系统结构及工作原理,其中包括整车技术参数,动力系统布置方案,动力电池、轮毂电机等零部件的工作原理及设计相应的方案并对方案进行对比选取。
(2)对纯电动轮毂电机越野车动力系统参数进行计算,确定动力系统匹配方法,通过功率计算,满足动力性的前提下进行电机参数匹配,由续航里程设计要求,电机工作特性来匹配动力电池的参数。
(3)用Cruise软件建立纯电动轮毂电机四驱越野车仿真模型,进行该车动力性能核算,进行仿真结果分析,在满足整车动力性及经济性基础上,确定动力系统方案。
第2章 四轮独立驱动纯电动越野车动力系统的选取
在考虑越野车动力性以及车辆空间需求的前提下,对比分析三种布局结构的动力系统方案,确定最终的动力系统结构方案。在此结构布局的基础上,再对各动力部件进行计算选型,以得到最终的整车模型。
2.1三种四轮驱动纯电动结构方案
(1)单电机集中式驱动系统
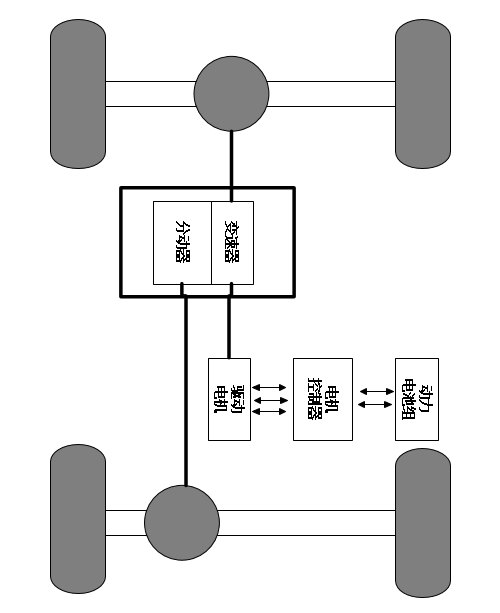 该驱动系统由驱动电机输出动力经变速器、分动器,前后主减速器/差速器分配给前后四轮。沿用传统的传动系统,动力在传递过程中损失较大,传递效率低。由于沿用传统燃油车的系统,技术成熟,对控制系统的要求较低,更容易对整车进行控制[8]。单电机集中式驱动系统结构示意图如图2-1所示。
该驱动系统由驱动电机输出动力经变速器、分动器,前后主减速器/差速器分配给前后四轮。沿用传统的传动系统,动力在传递过程中损失较大,传递效率低。由于沿用传统燃油车的系统,技术成熟,对控制系统的要求较低,更容易对整车进行控制[8]。单电机集中式驱动系统结构示意图如图2-1所示。
图2-1单电机集中式驱动系统结构图
(2)前后轴双电机驱动系统
该驱动系统前后轴各配置一个驱动电机,动力电池提供动力源,前后两电机独立驱动车辆。由于该系统不需要变速器、分动器及其它传功部件,所以传动效率较高,且由于传动部件少,使得地盘布置会更加灵活,便于车辆的人性化设计。由于需要对前后两电机进行力矩及转速的独立控制,所以对控制系统控制精度有更高的要求[9]。图2-2为前后轴双电机驱动系统结构示意图。
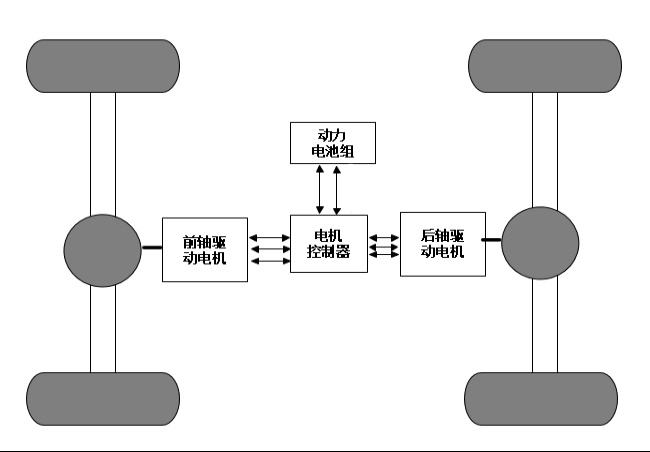 图2-2前后轴双电机驱动系统结构图
图2-2前后轴双电机驱动系统结构图
(3)分布式四轮轮毂电机独立驱动系统
该系统采用四个独立轮毂电机,将汽车的驱动部件、传动部件和制动部件集成到车辆轮毂内,整车由四个轮毂电机共同驱动。这样的结构与(1)(2)相比结构更加简单,省去底盘机械传动,整车效率更高,底盘空间也极大的增加了。同时轮毂电机响应快、转矩控制精确,可实现多种复杂驱动方式,能适应复杂工况下使用。但由于几乎所有部件都集中在车轮,增加了簧下质量,使汽车的操纵性和平顺性降低。制动能力有限,维持制动系统运行需要消耗不少能量也是其不足。图2-3为分布式四轮轮毂电机独立驱动系统的结构示意图。
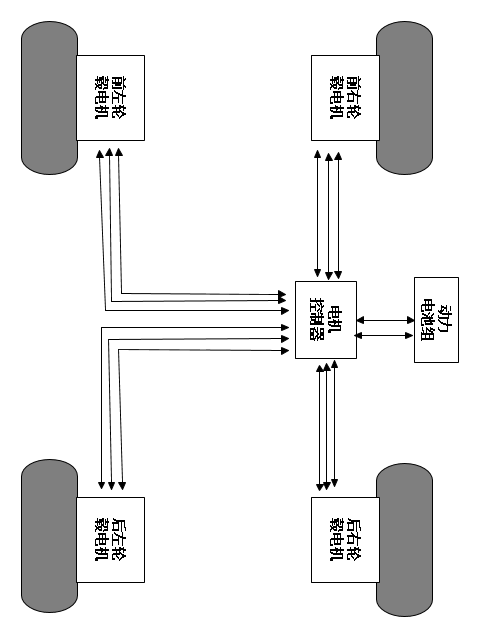 图2-3分布式轮毂电机驱动系统结构示意图
图2-3分布式轮毂电机驱动系统结构示意图
2.2动力系统结构方案的选择
在上述三种结构方案中,(1)方案类似传统燃油车,且其会有较大的传动损失,结构复杂,故不采用。(2)方案对控制系统的控制精度要求较高,前后电机能否更好的协同工作是该技术的关键。而布置两个电机需要较大的底盘空间,对底盘的合理布局有更高的要求。故不采用该方案。(3)方案分布式结构用电气连接取代机械连接,在提高能量传递效率的同时,节约了底盘空间。车辆的可使用空间更大,这有利于提高驾乘人员的舒适度。从动力性的角度看,轮毂电机响应快,能在短时间内提升转矩,有利于更好应对野外极端路面条件。故选用(3)方案。
第3章 动力系统参数匹配
3.1车辆基本参数
动力部件选型与参数匹配对汽车动力性和经济性影响很大,表3-1是某越野车的整车参数及动力性要求,并基于该指标进行动力部件参数匹配,并服务于后续仿真分析。
表3-1整车参数及动力性要求
名称 | 实际值 | 单位 | |
尺寸及仿真参数 | 长/宽/高(空载) | 4970/2134/1912 | mm |
轴距/轮距 | 3300/1806 | ||
最小离地间隙 | 410 | ||
车轮滚动半径r | 0.475 | m | |
滚动阻力系数f | 0.015 | / | |
空气阻力系数 | 0.5 | / | |
迎风面积A | 3.2 | ㎡ | |
整车参数 | 整车质量 | 4800 | kg |
载重 | 1000 | ||
全重 | 5800 | ||
前轴轴荷(满载) | 2700 | ||
后轴轴荷(满载) | 3100 | ||
乘坐人数 | 6 | 人 | |
动力性指标 | 最高车速 | 120 | Km/h |
最大爬坡度(以20km/h) | 60 | % | |
0-80kn/h加速时间 | 10 | s | |
40km/h行驶距离 | 250 | km | |

3.2驱动电机的选型与参数确定
3.2.1驱动电机的选型
由于越野车是四轮独立驱动布置,所以合理的选取轮毂电机类型直接影响整车的动力性、经济性、可靠性以及整车空间布置等多方面性能[10]。所以轮毂电机应具有如下特征:
- 驱动电机应有大的调速范围,大转矩以满足加速、爬坡要求。
- 驱动电机应有较高的功率密度和效率,这对整车的轻量化和续航里程帮助很大。
- 驱动电机的过载能力要强,高压电气系统安全性强。
目前市面上的驱动电机有四类,其各自性能参数见表3-2。
以上是毕业论文大纲或资料介绍,该课题完整毕业论文、开题报告、任务书、程序设计、图纸设计等资料请添加微信获取,微信号:bysjorg。
相关图片展示: