水下航行器AUV电力管理系统研究毕业论文
2020-04-11 17:50:02
摘 要
海洋资源丰富,在探测和利用海洋资源上离不开水下自主航行器(AUV),所以水下自主航行器的发展越来越重要。众所周知,水下自主航行器续航能力的大小一直是制约其快速发展的重要因素。影响水下航行器的续航能力的因素主要有动力电池的性能和用电设备的功耗。所设计的AUV电力管理系统包括发电系统,储能系统,以及各种用电设备的电力的分配,因此,对于整个水下自主航行器来说研究它的电力管理系统对提高其续航能力有着非常重要的意义。
针对小型水下自主航行器,提出了水下自主航行器波浪能发电系统、储能系统和电力管理系统的设计研究。其中波浪能发电系统主要根据水下自主航行器具体的需求利用波浪能随体发电装置将波浪能转化为电能,并储存在蓄电池中,来提高AUV的续航能力。在完成发电系统研究的基础上,进行水下航行器储能系统的研究,包括选用合适的动力电池并设计合适的电池管理系统。最后综合发电系统与储能系统的研究,设计合适的变换电路,完成AUV电力管理系统的总体设计方案。
关键词:水下自主航行器;波浪能;动力电池;电池管理;电力管理系统
Abstract
Marine resources are abundant, and autonomous underwater vehicle (AUV) are indispensable for the exploration and utilization of marine resources. Therefore, the development of underwater autonomous vehicles is becoming more and more important. As we all know, the endurance of autonomous underwater vehicle has always been an important factor restricting its rapid development. The factors affecting the endurance capability of underwater vehicles mainly include the performance of the power battery and the power consumption of the power equipment. The designed AUV power management system includes the power generation system, energy storage system, and power distribution of various electrical equipment. Therefore, researching its power management system for the entire underwater autonomous vehicle is of great significance to improving its endurance capability.
Aiming at small underwater autonomous vehicles, the design and research of wave power generation system, energy storage system and power management system for underwater autonomous vehicles were proposed. The wave energy power generation system mainly utilizes the wave energy follower power generation device to convert wave energy into electric energy according to the specific requirements of the underwater autonomous vehicle and store it in the battery to improve the AUV's cruising ability. The research on the underwater vehicle energy storage system based on the research of the power generation system is completed, including the selection of a suitable power battery and the design of the power management system. The research of the underwater vehicle energy storage system is carried out on the basis of the research of the power generation system, including selecting the appropriate power battery and designing a suitable battery management system. Finally, the research of integrated power generation system and energy storage system has designed a suitable conversion circuit to complete the overall design of AUV power management system.
Key word: autonomous underwater vehicle (AUV); Wave Energy; Power Battery; Battery Management; Power Management System
目录
第1章绪论 1
1.1课题提出的背景和意义 1
1.2国内外研究现 2
1.2.1国内AUV研究现状 2
1.2.2国外AUV研究现状 4
1.3本论文的研究内容 6
1.4本章小结 6
第2章AUV发电系统的研究 7
2.1波浪能发电 7
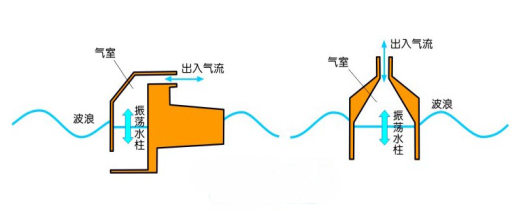
2.1.1波浪能发电原理 7
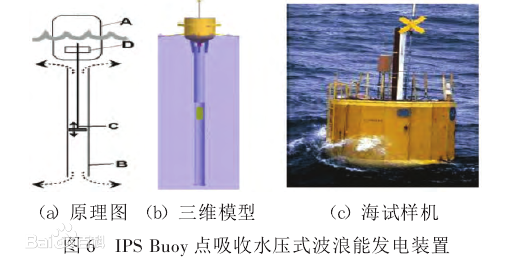
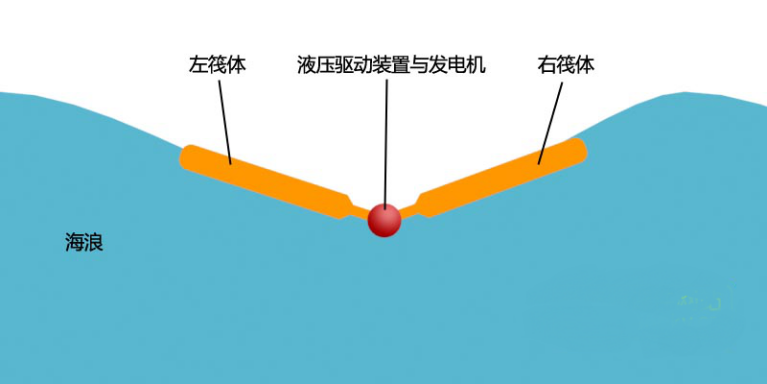
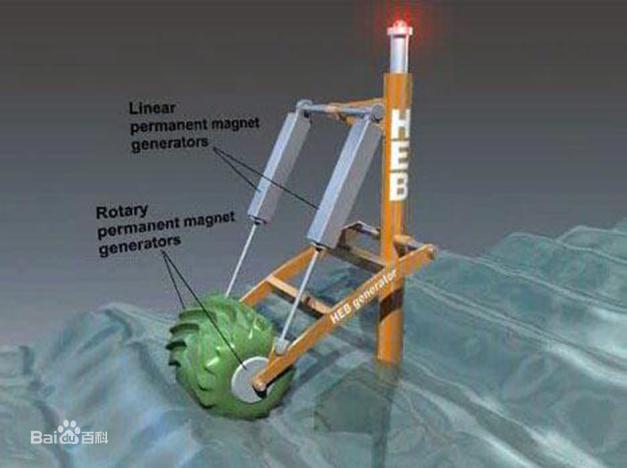
2.1.2波浪能发电装置 8
2.2基于AUV的波浪能发电装置 11
2.3AUV发电系统 12
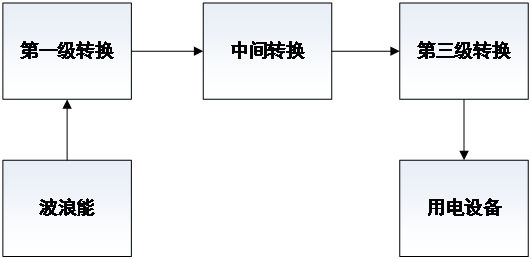
2.3.1AUV发电系统的设计 12
2.3.2AUV发电系统的组成 13
2.4本章小结 14
第3章AUV储能系统的研究 15
3.1AUV动力电池 15
3.1.1几种AUV动力电池的介绍 15
3.1.2动力电池的选用 18
3.2电池管理系统的研究 19
3.2.1电池管理系统的总体设计 20
3.2.2电池管理系统基本原理 20
3.3状态监测模块 21
3.4 SOC估算模块 22
3.5均衡控制模块 24
3.6本章小结 24
第4章 AUV电力管理系统 25
4.1AUV电力管理系统总体设计 25
4.2电力管理系统的组成 26
4.2.1控制模块 26
4.2.2发电模块 27
4.2.3储能模块 28
4.2.4用电模块 28
4.3AUV电力管理 29
4.4本章小结 29
总结 30
参考文献 31
致谢 32
第1章 绪论
1.1课题提出的背景和意义
地球上的海洋面积占地球总面积的三分之二还多,海洋中蕴藏着很多尚未开发的资源,世界上很多国家以探索和开发海洋资源为目的,并且他们都投入巨大的人力和物力来加快海洋资源的获取。其中发达国家美国为首,更是把海洋开发和利用作为国家的长远计划。在探测和开发海洋是都必须有借助各种高科技手段,仅仅依以靠人力在恶劣的海洋环境中完成工作量巨大的海洋开发和调查作业是极其困难,特别是对深海海洋资源研究与开发,这就得依靠先进深海设备技术。随着科学技术的快速发展,各种各样先进的海洋探测设备,技术方法已经被研究出来,继续研究发展这些设备与技术方法是为了更好地克服开发海洋资源所带来的困难,提高海洋资源开发效率。
自主式水下航行器(AUV,Autonomous Underwater Vehicle)是一种综合了人工智能和其他先进计算技术的任务控制器,集成了传感器、深潜器、环境效应、能量储存、转换与推进、计算机软件、新材料与新工艺以及水下智能武器等高科技技术,军事上用于反潜战、水雷战、侦察与监视和后勤支援等领域[1]。水下自主航行器作为一种活动范围大、隐蔽能力强、机动能力强、环境适应性好、安全智能度高、性价比值高等优点于一身的海洋运载工具,而且具备自主航行作业的能力,依靠自带能源可长时间在水下自主远程航行并可回收的无人智能小型装备平台,可以独立执行特殊的使命和任务,在海洋资源勘探,军事侦察,海底搜救等方面发挥着重要作用。由于水下自主航行器在海洋开发和探测方面具备强大的优势,因此许多国家在水下自主航行器的研究上都投入了大量的人力和物力,并且水下自主航行器的研究正处于飞速发展阶段,因此也成为很多发达国家军事海洋技术研究的前沿。
AUV的推进动力主要分为电推进和热推进,与热推进相比电推进具有噪声小、稳定性好等优点,并且动力电池还可以为其他系统供电,所以大部分AUV还是通过动力电池来提供动力[2]。由于AUV需要脱离母船自主航行去完成特定的任务,所以电池储存的电能将成为其水下工作的唯一动力能源,又由于动力能源一直都是AUV动力系统及各负载设备能否正常工作、性能提升和任务拓展的关键影响因素,因此高性能水下动力电池技术已经成为当前和未来AUV发展的重点。AUV对电池的续航能力要求极高,在无法解决动力电池源头问题所带来的局限性,所以对AUV的电力管理系统的研究尤为重要,力求通过制定合理的电力管理策略,来减少不必要的能源浪费,以达到更有效率的能源利用,使得自主水下航行器在执行任务时的续航能力最大化。
1.2国内外研究现
水下自主航行器是一种高技术的集成体,它的结构设计和所需要的结构材料等相关技术已经取得了很好的发展,但是随着时代的发展,对AUV的航行范围、下潜深度和续航时间等多功能作业要求不断提高,所以水下航行器的很多关键技术等待着研究解决,力求使水下航行器发展到新的水平,发展为更为专业、智能、大范围的海洋运载工具,为海洋开发事业做出更大的贡献。目前对AUV的研究方向主要有四个,分别为远距离,大深度,长续航,多功能[3]。
1.2.1国内AUV研究现状
虽然我国对自主式水下航行器的研究较晚,但是其发展迅速。比如国船舶科学研究中心、中科自动化所、上海交通大学、哈尔滨工程大学等科研单位等都在AUV的研究上取得了巨大的进展。

图1-1沈阳自动化研究所的“潜龙三号”
“潜龙三号”无人自主潜水器由中国大洋矿产资源研究开发协会办公室立项,中国科学院沈阳自动化研究所作为技术总体单位,联合国家海洋局第二海洋研究所等共同研制。作为目前我国最先进的自主潜水器,“潜龙三号”集成深海热液异常探测、高精度微地形地貌探测、高精度近底磁力探测、近底光学探测等功能。“潜龙三号”长3.5米,高1.5米,重1.5吨,外形与一条橙色的“小丑鱼”一样。“小丑鱼”的嘴、眼睛、鳍、肚子、尾巴等,都有其特殊功能,嘴巴上装有前视声呐,可将潜水器前进方向采集的声学数据转化为图像,用以识别障碍物和周边环境。眼睛是水平槽道推进器,辅助潜水器快速转弯响应,助推其左右转向。4个“鳍”是4个全回转式舵,靠其操控实现潜水器的灵活前进后退、上浮下沉、左右转弯。肚子侧下安装着测深侧扫声呐,实现探测海底精细地形地貌功能。同时,侧面还可搭载模块化作业工具,如挂载温盐深仪(CTD)、多参数水质仪、甲烷传感器等。肚子下面安装着水下高清照相机;肚子下面还安装有高度计,同时肚子里面的深度计可以时刻知道自己在哪个水深深度上航行,尾巴上安装的是高精度磁力探测仪。
“海燕”号水下滑翔机是由天津大学独立研制的,并且通过了南海北部水深大于1500米海域的测试。这次水下测试取得成功,打破了国外一直对我国的技术限制,创造了很多记录其中包括中国水下滑翔机无故障航程最远、工作深度最大、剖面运动最多、时间最长。“海燕”号水下滑翔机续航能力高可不间断的连续在水下工作大约30天,主要是因为采用了国内最新的混合推进技术。“海燕”号水下滑翔机与鱼雷相似,与传统的水下自主航行器(AUV)相比就显得身轻体瘦,该水下滑翔机全长1.8米,直径0.3米,只有大约70KG重,这款水下滑翔机设计最大航程1000公里,最大深度1500米。

图1-2天津大学研制的“海燕”号水下滑翔机
“海燕”号水下滑翔机可以完成AUV相同的运动状态,可以实现转弯,水平运动。由于结合了螺旋桨推进与浮力驱动技术,所以具备传统滑翔机剖面滑翔的能力也就是可以进行锯齿状滑行前进。该款水下滑翔机在为来的应用中可以凭借灵活小巧的身姿,能较长时间跟随海洋动物获得数据。这款水下滑翔机负载能力为5千克,并通过扩展搭载光学、声学等专业仪器,可在海洋观测和探测领域大显身手。
1.2.2国外AUV研究现状
美国作为世界上最发达的国家,对AUV的研究属于世界前列,麻省理工学院研制的水下自主航行器中目前较先进的有Reef Explorer II系列和Odyssey IV系列等[4]。其中ODYSSEY 水下自主航行器主要用于科学考察和海洋自动取样网络研究,AUV主体长度为220cm,直径57cm,水平运动速度可以达到4kn以上,爬升速度可以达到3kn以上,续航力在3kn的航行速度下可续航约6小时,如果该AUV采用最大电池结构,续航力在3kn航行速度下可达24小时。该AUV所采用的动力电池是1.1kWh的银锌电池(采用最大电池结构时大于5kWh),推进系统在四个控制面之后有一个电动推进器;由Woods Hole海洋研究所研发的ABE 水下自主航行器主要用于深海海底探查,其主要特点是机动性好,能完全在水中悬停,或以极低的速度进行定位、地形勘测和自动回坞。该AUV长220cm,速度可达2kn,续航力根据电池类型可以达到13km-193km之间。其动力电池采用铅酸电池、碱性电池或锂电池。
以上是毕业论文大纲或资料介绍,该课题完整毕业论文、开题报告、任务书、程序设计、图纸设计等资料请添加微信获取,微信号:bysjorg。
相关图片展示: