《船舶能源效率评估使用船模拟器》外文翻译资料
2022-07-26 20:51:33
英语原文共 6 页,剩余内容已隐藏,支付完成后下载完整资料
《SHIP VOYAGE ENERGY EFFICIENCY ASSESSMENTUSING SHIP SIMULATORS》
《船舶能源效率评估使用船模拟器》
关键词:船舶效率,模拟,Matlab Simulink
摘要:全球贸易的增长推动了船舶规模和数量的增长。然而,这种增长的需求导致航运造成更严重的空气污染。这是领先的设计师和运营商提出和采纳新型
动力和推进系统。然而,评估实际情况有一个挑战受益于使用某种改造技术或改变操作条件他们的船只,这可以使用数值模拟来解决。本文提出了一个时域一自由度船模拟器在MATLAB / Simulink中实现使设计人员能够预测船舶推进系统在航行期间的性能。提出的模拟器用于评估三种不同EEDI的效率IMO建议的SEEMP措施,以提高船舶的推进系统效率是:航行执行,慢蒸,以及混合动力和推进概念使用燃料电池。开发的模拟器可用于进一步的研究和更多的元素计划添加到船舶模拟器,使其更通用和能力测试更多的推进配置选项。
1引言
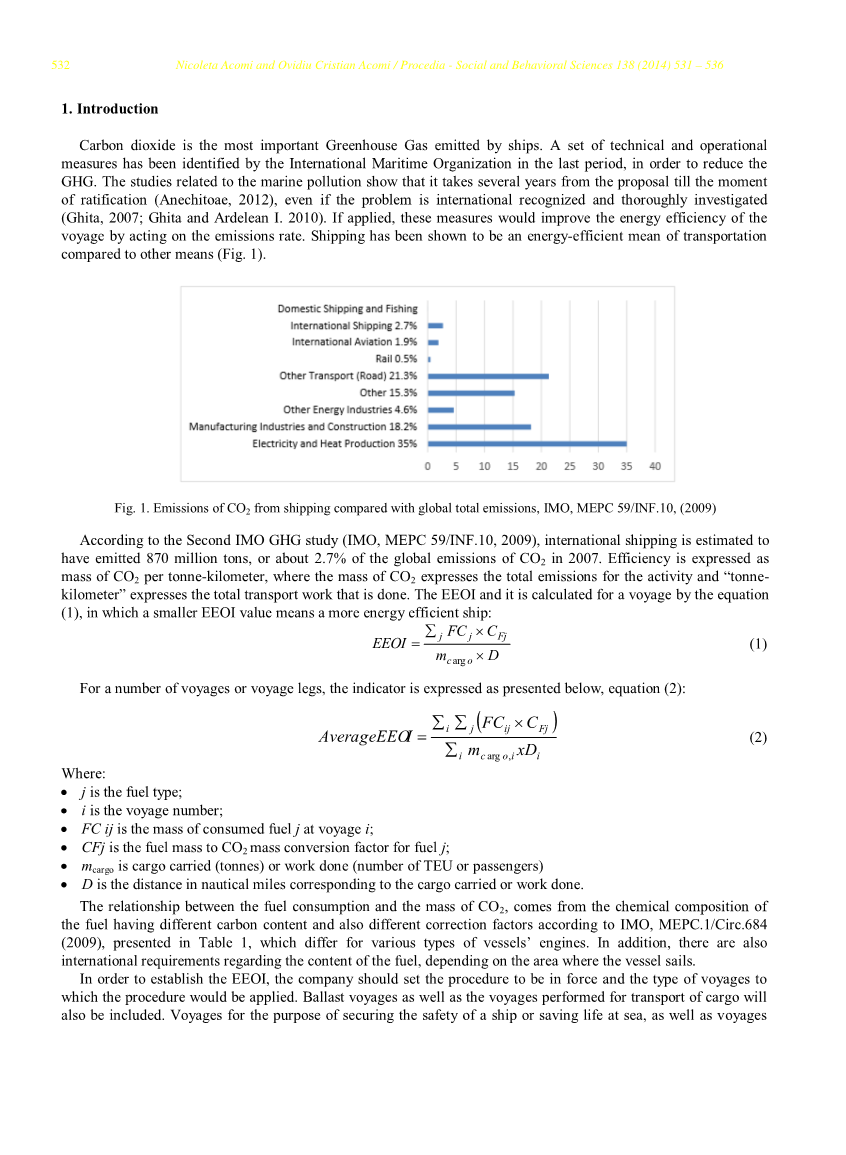
近年来的许多研究集中在提高船舶的燃料效率降低燃料消耗和排放。根据联合国会议贸易和发展(贸发会议),世界贸易量的80%以上由数量处理运输。贸易的增长推动了船舶规模和数量的增长全球船队。来自航运的能源需求不断增长,导致船舶排放的绿色气体(GHG)增加。国际海事组织(IMO)的一项研究估计CO2排放量,其中航运负责全球二氧化碳排放量的3.3%和来自所有来源的全球排放量的大约20%。此外,与其他运输模式相比,由于海洋燃料油的高硫含量,运输具有最高的SO 2排放。为了控制船舶温室气体,IMO引入了具有严格国际排放标准的排放控制区域(ECA),以控制N Ox,SOx ,和PM排放。在ECA中,船舶必须使用硫含量小于0.1%的燃料,这增加了在这些区域内工作的船舶的燃料堆积。关于二氧化碳排放量,海事组织公布了用于船舶的技术和操作措施。这些措施于2013年生效。对所有400总吨及以上的新船舶强制实施能源效率设计指数(EEDI),对不同船舶类型和尺寸要求最低水平的能源效率。此外,所有船舶都需要船舶能源效率管理计划(SEEMP),这是提高船舶能源效率的操作工具。
为了达到船舶能源效率的要求水平,船舶设计者和建造者可以采用EEDI和SEEMP最合适的成本效益技术。但是,它是必要的,以评估使用某些技术或改变船舶的利益运行条件,并研究其对船舶性能的影响,这可以使用数值模拟来完成。在这项工作中,提出了一个具有一个自由度的时域船舶模拟器,其能够预测船舶性能,同时考虑到天气条件和船舶流体动力学。这个模拟器基于一个建筑块模块方法,其中船体,螺旋桨和船舶推进系统的主要部分由独立的子模型表示,并在MATLAB / Simulink环境中实现。开发的船舶模拟器已被用于测试效率两个SEEMP测量:用于46803 DWT双壳油轮的航行执行和慢速蒸汽。使用用于off岸上供应船(OSV)的开发的模拟器来测试是使用燃料电池的混合电力概念的另一EEDI测量。此外,该模拟器可以被修改和改进以用于评估其他EEDI和SEEMP措施的优点,例如:优化的船体尺寸,废热回收,发动机效率增强和减少的辅助功率测量。
2船舶模拟器
表示船舶分量的数学方程可以用a来实现使用MATLAB / Simulink环境中的块进行图形编程表示。从图1中可以看出,每个块表示系统的组件,例如螺旋桨或发电厂。输入块负责显示数据任务和船舶,如:所需速度(V),航线气象,船舶尺寸和其形式的系数。这些数据将用于计算船舶的平静水阻力(R),风和波的附加阻力(Delta;R),船舶的流体动力学系数接下来,这些力与由螺旋桨(TP)产生的推力平衡以计算船的实际速度,使用PID速度控制器控制螺旋桨转速(np)所需的速度。
图1:在MATLAB / Simulink环境中的船舶模拟器实现螺旋桨所需的功率由动力块提供,可以是:2冲程或四冲程柴油发动机动力装置或由燃料电池混合动力驱动的电动机供电系统。在下面的部分中,将更详细地讨论每个部分。
2.1输入数据块为了执行模拟,应通过向模型提供一些输入用户只需使用新数据编辑输入文件。 然后,输入值为自动馈送到适当的输出端口,并在其他块之间传递模拟器。 所需的输入数据包含有关船舶,航行和的信息周围环境如表1所示。表1:
船舶模拟器所需的输入船舶尺寸和形状系数,船舶细节船首弓,船首数,支架,推进器。所需速度或螺旋桨rpm,船舶航向角度任务数据井眼数,天气角度,水温环境此外,输入数据块使用户 在两个建模方法之间进行选择,通过使用预定的功率分布以发动机速度的形式或向后面模型通过使用预定的船速分布来模拟前向模型,并且模拟器计算所需的功率。
2.2平静的防水块用于预测船舶阻力的基本方法可以分解为实验,经验/统计和数值方法。 对于这项研究,为了预测船舶耐水性,使用包含回归分析方程的数学模型,因为它们可以容易地直接在模拟环境中实现。在应用范围,出版日期和编程的容易程度的基础上,Hollenbach的方法[ 6]因为其相对现代的数据库,其广泛的适用性,与Holtrop-Mennen方法相比,它还需要更少的输入参数[7],因此在早期设计阶段更合适。
2.3添加电阻块
由于风和波的增加的阻力的预测是非常重要的船舶推进系统的设计由于其对航行持续时间的不利影响消耗功率。 增加的阻力可以使用风洞通过实验估计和推进模型试验或理论上使用船体压力法,动量和能量法或辐射能法[8]。为了预测在早期设计阶段由于增加的电阻的速度损失,使用简单的近似公式有助于估计船舶天气的影响。在这个模拟器中采用的公式是由Aertssen提出的执行回归分析船舶性能数据来估计风速造成的速度损失百分比波浪来源于他对全尺度船舶性能的分析.
其中m和n随天气方向和Beaufort数和L而变化P P是长度船在垂线之间,速度损失将用于估计增加的电阻。添加阻力块的验证已经在Aertsssen的公式在[12]中用来计算长度为200 m的集装箱船的速度损失添加电阻块给出与表2所示相同的结果。
2.4船舶水动力阻挡
这个块负责表示船体和船体之间的相互作用螺旋桨在尾流分量和推力推导方面的相互作用船体和周围环境的增加质量。在这项工作中,只有船舶浪涌浪涌附加质量用于考虑流体动力学由船舶纵向加速度产生的力,并且使用Oltmann#39;s计算半经验方程作为船舶阻力系数的函数CB和位移(M)船舶流体动力学模块的输出还包括平均尾流(w)和推力扣除(t),该估计具有根本重要性,因为它影响螺旋桨推力它应该与螺旋桨速度,直径和功率一起确定。在预定时,临时设计阶段,没有关于船的详细信息。因此,回归等式适合使用。对于单螺杆船,选择英国船舶研究协会(BSRA)公式用于计算尾流分数和推力[11]。对于双螺旋船,尾流分数是使用泰勒公式计算[12],推力扣除是根据Holtrop和Mennen公式计算[7]
2.5螺旋桨块螺旋桨阻挡使用先前估计的尾流分数,推力扣除,船速度,螺旋桨速度和关于螺旋桨的数据作为估计产出的输入推力(TP)和扭矩(QP),其根据以下等式计算无量纲推力KT和转矩系数KQ,水密度rho;的函数螺旋桨直径Dp如下,
其中无量纲推力和扭矩系数作为螺旋桨前进比J的函数使用Wageningen B螺杆的以下近似等式计算系列。
其中系数a,b,c和d s值取决于螺旋桨叶片面积比和桨距比。
2.6强制平衡和速度控制器块将来自螺旋桨块的推力与总阻力进行比较船舶计算船舶的纵向加速度考虑使用公式5
由该加速度产生流体动力。然后将加速度积分以计算作为主要的当前速度输出,然后将其与包含标准PID控制器的速度控制器块中的所需速度进行比较,该标准PID控制器产生所需的螺旋桨转速作为馈送到功率块的信号。 选择PID控制器是因为简单,参数少数要调谐,并已成功应用于反馈控制系统[13]
2.7电源块功率块是灵活的,并且以便于测试的方式构造不同的动力源包括二冲程柴油发动机,四冲程柴油发动机,燃料电池,和电池。 动力块的主要输入是螺旋桨扭矩和旋转速度。 传递函数模型用于模拟2冲程和4冲程柴油发动机因为发动机扭矩是开发的模拟器中唯一的要求。 对于2冲程柴油发动机,由Bondarenko开发的船用柴油发动机数学模型[14]如等式6
所示。其中Qmcr,Hmcr和Nmcr是发动机扭矩Q,燃料流量h的值p和转速n。对于四冲程柴油发动机,使用以下传递函数[15]。
其中Y是燃料指数,K是增益常数,T是时间常数。 第二部分柴油机动力学描述了旋转运动和扭矩平衡轴,如等式8
所示,其中Im是包括螺旋桨在内的旋转部件的惯性和增加的惯性水,ns是轴速度,Qeng是发动机扭矩,Qp是螺旋桨转矩,和QF是摩擦扭矩。 此外,在这项工作通用模型包括在Sim Power Systems工具箱Simulink [16]的燃料电池和电池在开发的模拟器中使用模拟燃料电池和电池的性能。 因此,发达的电源块是灵活的,可用于测试不同的电源系统配置,包括柴油机械,柴油电动和燃料电池/电池混合动力推进,如图所示图2。
3案例研究
3.1船舶数据在第二次IMO温室气体研究中,油轮船类别具有最高的燃料消耗[2]。 因此,单螺杆46803 DWT双壳油轮使用2冲程柴油选择主要尺寸和数据如表3所列的发动机研究IMO建议的航行执行和慢速航行措施。 在南安普顿大学为这艘船开发了1/60规模的自由运行模型,通过牵引的实验工作研究油轮的效率改进方法坦克和湖泊,包括裸船测试,自推进测试和系船柱拉力测试。裸船牵引油箱试验用于验证开发的阻力块如图3所示,其中使用Froude传统方法来放大模型标度电阻结果。
混合动力和推进使用燃料电池的概念是第三种措施因为在混合电力推进中使用燃料电池在本研究中进行研究将提高能源效率,解决短,中等排放问题和长期不同于短期和中期效应的SEEMP措施只有长期。 使用两个四冲程柴油发动机的双螺杆o ff岸供应船(OSV)已经为本研究选择了表4中列出的主要维度和数据因为其具有高百分比的低速操作的变化的操作分布这使得OSV最好地利用电力推进系统。
3.2船舶航行模拟
为了设置被检船的模拟,两个实际航行的数据从自动识别系统(AIS)数据库中提取[18]其中船的速度和位置在船舶航行期间被保存。 预定的船速剖面和螺旋桨速度曲线根据从AIS保存的任务数据假定。同时提取对应于两个检查任务的真实天气条件全球预报系统(GFS)数据库[19],并使用一个输入到模拟。
4结果
4.1航行执行
这个SEEMP测量探讨了航行规划和执行的改进。它包括不同的船舶操作模式,最佳路线,减少港口时间和长压载航程。为了提高盈利能力,船东在运营船舶预定的高速度以增加每年的货物数量,这被认为是恒定速度操作模式,其可以增加动力需求和燃料消费,特别是在恶劣天气。操作船舶的另一种方式是使用恒定的螺旋桨速度操作模式具有更有效的发动机的最小比燃料消耗然而天气条件可能导致速度损失和船舶迟到在额外的成本,这可能超过燃料节省。开发的船模拟器已用于比较这两种操作模式的经检查的油轮在一个真正的单一航程。已经假定和使用了两种预定义的船速和螺旋桨速度分布作为输入到两个单独的模拟以执行相同的航行距离相同的真实天气参数。结果表明采用恒定船速模式所考虑的航行的操作导致更早到达并节省航行时间4%,这意味着每年更多的货物。但是,采用恒定的螺旋桨速度模式可以降低燃料消耗(吨)2%,降低燃料消耗率(吨/天)为6%。
4.2慢蒸
减速或慢蒸减速是另一种SEEMP措施,其目的是减少GHG通过降低船速自消耗功率可以假定为一个三次方功能船速。 然而,它将增加航行持续时间。 对于同一艘油轮,以不同的速度每次执行不同的模拟以执行相同的假定平均恒定辅助功率为750kW。 仿真结果揭示将船速降低约44%将导致燃料消耗节省46%如图4所示。
如图4所示,辅助功率燃料消耗随着更高而降低因为航行时间正在减少。 另一方面,主机燃料sumption随着更高的速度增加,给出关于最佳速度的指示假设750kW的恒定辅助功率的最小燃料消耗。 假设更高辅助动力产生最佳速度,因为同时降低船速,辅助动力燃料消耗增加,这需要更高的最佳速度。 如图5所示,用于最小燃料消耗的最佳速度从约7.9kn增加到9.5kn辅助功率从750kW增加到2000kW。
4.3混合动力和推进概念根据OSV的操作要求:扭矩,推力,功率和叶轮角速度,选择直流电动机是因为其宽范围的速度和扭矩,低成本和较不复杂的控制系统[20]
。 为了确定燃料电池和电池所需的功率,假设燃料电池将提供平均所需功率,而电池将提供峰值功率,并且在低功率需求期间将被再充电,如图6所示。能量管理策略(EMS) 已经被开发以良好地管理来自燃料电池和电池的功率流,以最大化燃料电池效率和减少其消耗的方式,这不是这项工作的主要焦点。
对于审查的OSV的使命,四冲程柴油发动机由两种燃料替代电池总功率为100 kW,锂离子电池提供峰值功率,两个电动机,同时使用相同的齿轮箱。 开发的模拟器的变化将仅发生在将用柴油机发动机缸体代替的动力块燃料电池块,电池块,DC电机块和EMS块,如图7所示。然而,在这两种情况下,整个功率块将具有相同的输入和输出。
这将导致体积节省42%,并且所需的重量小于1%混合燃料电池系统并且其将消除由于氢的排放问题清洁碳足迹,但第一成本会更高。 但是,吃了燃料和氢气,所提出的混合燃料电池的体积和重量电池系统将由于所需的体积和重量而高于当前系统的储氢系统,如表5所示。
5结论
总之,提出了一个时域一自由
全文共8574字,剩余内容已隐藏,支付完成后下载完整资料
资料编号:[144523],资料为PDF文档或Word文档,PDF文档可免费转换为Word



