40m高空作业车液压系统设计毕业论文
2020-02-19 19:27:30
摘 要
高空作业车目前在各个领域得到越来越多的应用,随着高空作业车的发展,人们对其性能也有了更高的要求。特别是当作业高度的提升,对高空作业车的稳定性有了更大的挑战,如何在提升作业高度的同时能够使作业车达到高效率、高稳定性和高适应性是目前需要解决的一个重要问题。本课题以40米高空作业车为研究对象,对各种类型的作业车进行分析,设计一种具有高稳定性的工程机械。毕业设计期间主要完成了以下几点任务:
(1)针对作业高度达到40米的要求,首先分析了自行式、车载式、直臂式、铰接式等各类高空作业车的原理和特点,给出了合适的整车结构,即自行直臂式高空作业车。
(2)出于对工作平台安全性和稳定性的考虑,分析了四种调平方式,选择了调平精度高、调平速度快的电液比例自动调平方式。同时考虑到整车的稳定性,设计了支撑机构的自动调平。
(3)通过对液压系统的开(闭)式、调速、调压和换向等方案进行分析比较,给每个回路选择合理的系统方案,然后来设计高空作业车的液压系统原理图。
(4)通过分析计算,选择合适的变(定)量液压泵、液压缸、变(定)量液压马达和摆动液压缸,然后根据设计要求选择合适的方向阀、流量阀和压力阀。
本次课题合理的设计了各个工作装置和液压控制原理图,整个系统采用较高的自动化控制,可以在各种工作环境中保持较高的稳定性和安全性。
关键字:高空作业车;液压控制阀;自行直臂式;电液比例调平;液压控制原理图
Abstract
Aerial work platform are now being used more and more in various fields. With the development of aerial work platform, people have higher requirements for their performance. Especially when the height of the work is increased, the stability of the aerial work platform is more challenging. How to improve the working height and achieve high efficient, stability and adaptability of the work platform is a problem that needs to be solved now. This project is mainly in the 40-meter aerial work platform as the research object, analyzes various types of aerial work platform, and designs a construction machine with high stability. The main contents are as follows:
(1) For the requirement of working height of 40 meters, firstly analyze the principle and characteristics of self-propelled, vehicular -mounted, straight-arm, articulated and other types of aerial work platform, and put forward the appropriate platform structure, that is, straight Arm type aerial work platform.
(2) Based on the consideration of the safety and stability of the working platform, four kinds of leveling methods are analyzed, and the electro-hydraulic proportional automatic leveling method with high leveling precision and fast leveling speed is selected. At the same time, considering the stability of the whole vehicle, the automatic leveling of the support mechanism is designed.
(3) Through the analysis and comparison of the hydraulic system's open (closed), speed regulation, pressure regulation and reversing schemes, a reasonable system scheme is selected for each loop, and then the hydraulic system schematic diagram of the aerial work platform is designed.
(4) Through analysis and calculation, select the appropriate variable (fixed) hydraulic pump, hydraulic cylinder, variable (determined) hydraulic motor and swing hydraulic cylinder, and then select the appropriate directional valve, flow valve and pressure valve according to the design requirements.
This project has rationally designed various working devices and hydraulic control schematics. The whole system adopts high automation control and can maintain high stability and safety in various working environments.
Keywords: aerial work platform; hydraulic control valve; self-straight arm type; electro-hydraulic proportional leveling; hydraulic control schematic
目 录
第1章 绪论 1
1.1 高空作业车发展现状 1
1.1.1 高空作业车国外研究现状 1
1.1.2 高空作业车国内研究现状 1
1.2 课题研究目的及意义 2
第2章 高空作业车工作装置设计 3
2.1 高空作业车整车结构设计 3
2.2 高空作业车主要机构设计 3
2.2.1 行走机构 3
2.2.2 支撑机构 4
2.2.3 回转机构 4
2.2.4 变幅机构 5
2.2.5 伸缩机构 5
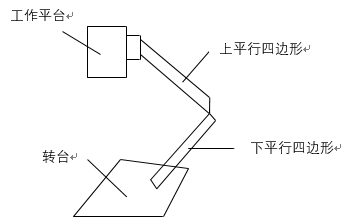
2.2.6 工作平台调平机构 6
2.2.7 工作平台回转机构 8
2.3 高空作业车整车结构 9
第3章 高空作业车液压系统设计 10
3.1 液压系统方案的确定 10
3.1.1 确定液压系统类型 10
3.1.2 确定液压泵类型及数量 10
3.1.3 确定调速方案 10
3.1.4 确定调压方案 11
3.1.5 确定换向方案 11
3.1.6 确定其他回路 12
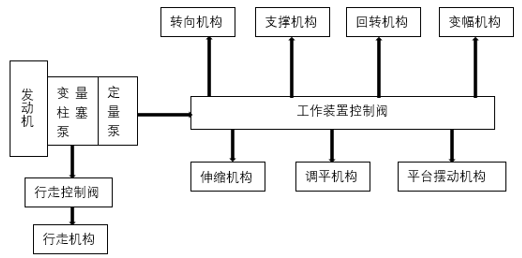
3.1.7 系统框图 12
3.2 制定液压系统原理图 13
3.2.1 行走转向液压回路 13
3.2.2 下车支撑液压回路 14
3.2.3 回转变幅伸缩液压回路 15
3.2.4 工作平台转动调平液压回路 16
第4章 液压元件的计算和选择 17
4.1 高空作业车主要技术参数 17
4.2 初选系统工作压力 17
4.3 液压执行元件的计算选择 18
4.3.1 计算行走马达的排量及选型 18
4.3.2 伸缩液压缸设计计算 19
4.3.3 变幅液压缸 21
4.3.4 工作平台调平液压缸 21
4.3.5 工作平台摆动液压缸 22
4.3.6 作业车回转马达 23
4.3.7 支撑液压缸(垂直,水平) 23
4.4 液压泵的选择 24
4.4.1 变量泵的选择 24
4.4.2 定量泵的选择 25
4.4.3 补油泵的选择 25
4.5 选择原动机 26
4.6 液压控制阀的选择 26
4.7 油箱设计 27
4.8液压系统压力损失和温升计算 27
4.8.1压力损失计算 27
4.8.2液压系统温升计算 29
第五章 技术经济性分析 30
总结 31
参考文献 32
致 谢 34
第1章 绪论
1.1 高空作业车发展现状
高空作业车是一种将工作人员、作业工具等通过作业平台运送到指定的空中位置进行安装、维修等作业的先进专用的特殊高空作业机械[1]。高空作业车是一种可以通过工作人员的操作在地面上行驶的行走机械,根据其功能作用也可以把它归为工程机械,在高空施工这种工程项目上起到至关重要的作用。目前,在全球高空作业车的使用越来越多,应用范围也越来越广。小到路灯维修、墙面装修,大到船舶制造、桥梁建设等等都有高空作业车的身影,当然用得最多的还是在一些基础设施建设上。高空作业车如今覆盖范围越来越大,最主要的原因是它可以给工程作业带去很大的便利,很大程度的减少了人力物力,并且极大的提高了作业的效率。
1.1.1 高空作业车国外研究现状
高空作业车最先是在欧美地区制造出来的,在1950年,由英国制造商制造出第一批用于路灯维修的高空作业车,作业高度只有十多米[2]。由于欧美国家研究高空作业车的起步时间比较早,现在的技术水平已经非常高。同时发展较快的还有日本的几家公司,其技术水平不比欧美国家低多少。他们的技术水平主要表现在作业高度、结构形式、运动控制方式、安全保障等方面[3]。国外高空作业车研究现状主要表现在一下几个方面:
- 产品控制系统普遍智能化;
- 安全控制装置齐全;
- 采用高强度材料和轻质合金材料;
- 产品质量水平高。
高空作业车的主要制造商欧洲以BRONTO(波浪涛)、PALFINGER(帕尔菲格)、RUTHMANN(胡特曼)等厂家为代表,美国已TEREX(特雷克斯)、ALTEC(阿尔泰克)、TIME(时代)等厂家为代表,日本以TADANO(多田野)、AICHI(爱知)等为代表。
1.1.2 高空作业车国内研究现状
我国的高空作业车相比于国外来说起步比较晚,在改革开放时期,中国开始大力发展工业建设,桥梁、建筑、造船等工业迅猛发展,这一切带来的连锁反应给高空作业车的发展起到了很大的牵引作用。国内开始大范围的使用高空作业车来加快工业建设的步伐,起初,由于没有这方面的技术,只能通过引进国外先进的作业车。随着时间的推移,国内开始慢慢的开始自己设计高空作业车,经过几十年的摸索和发展,我国的高空作业车技术相对于上世纪末已经有了非常大的提升,作业高度也从开始的一二十米发展到现在的四五十米。中国的高空作业车厂家主要有:徐工、徐州海伦哲、柳工、湖北程力、高曼重工等。这些公司生产的高空作业车主要以车载式为主,作业高度也基本上处于三十米之内,整体结构较为简单,很少生产直臂自行式作业车。虽然国内在高空作业车的研究和制作中取得了非常重大的进展,但是跟国外相比还存在着较大的差距,主要体现在以下几个方面:
(1)产品品种单一;
(2)技术水平较低;
(3)制造工艺落后;
(4)产品可靠性差。
1.2 课题研究目的及意义
进入二十一世纪,我国的各方面的技术水平得到了很大的提升,各类工程机械被应用在各种各样的场合,对国民经济的发展起到了重要的作用。对类似于高空作业车的这类起重机械的需求也日益剧增量,但国内高空作业车的技术水平与英国、美国、日本等国家相比还有不小的差距,尤其是在作业车的工作高度这一方面有很大的提升空间,因此本次课题的研究目标为工作高度可达40米的高空作业车,分析高空作业车的各个机构,使其符合力学和运动学的要求,并设计出作业车的整个液压系统。液压系统是高空作业车的关键控制和执行系统,是其核心部分。高空作业车的各个机构,如行走、转向、支撑、回转、臂架变幅、整车和工作斗的调平等都是由液压来提供动力。液压系统在高空作业车中扮演着至关重要的角色,若某一模块设计不合理可能将会使作业车无法正常工作,更甚者会对工作人员的生命安全造成威胁。现今随着高空作业车的不断发展,人们对作业车的要求也越来越高,其中“三高”:高安全性、高适应性、高效率是各个企业所一直追求的目标,想要达到“三高”的要求,对液压系统的研究设计是重中之重。由于本人的专业是液压方向,在这次课题中结合自己大学四年所学习的知识和实习期了解的液压方面的知识,将重点对高空作业车的液压系统进行分析和设计。
第2章 高空作业车工作装置设计
2.1 高空作业车整车结构设计
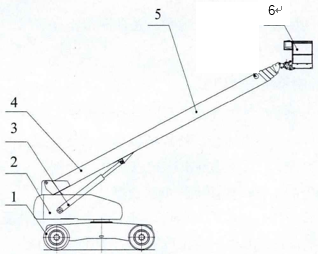
按照不同的分类形式,高空作业车可以分为不同的类型。根据其工作臂结构的不同,高空作业车可分为:(1)工作平台只能在竖直方向上来回运动的剪叉式作业车,该作业车的优点是结构简单,成本低,缺点是工作平台只能在很小的范围内工作;(2)工作平台沿着伸缩臂中心轴线往复运动的直臂式作业车,该作业车的优点是操作较为简单,工作效率相比于其他类型作业车要高,缺点是在很高的位置作业,其稳定性相对来说要低;(3)工作平台可通过两节以上铰接在一起的工作臂运动到空间各个位置的铰接式(折臂式)作业车,该作业车的优点是作业范围大,可以通过增加作业臂的节数来提高作业高度,缺点是作业高度较低,适用于低空作业;(4)结合了直臂式和铰接式高空作业车全部特点的混合臂式作业车,该作业车的优点是具备其他作业车的特点,作业高度大,缺点是结构复杂,成本大。高空作业车根据行走方式又可分为车载式和自行式高空作业车。车载式的底盘是汽车底盘,因此底盘不需要再次设计,只需稍加改装就可以跟高空作业车的臂架相组合,目前国内用得比较多的汽车底盘有东风汽车和江铃汽车。自行式的底盘是一种专用底盘,自行式的优点是可以按照需要设计底盘,不受原有汽车底盘的限制,稳定性比车载式要好,并且效率高。目前对于要求工作高度达到30米以上的作业车,一般都采用自行走的方式。
本次课题设计的是40米的高空作业车,基于上述对高空作业车各结构类型特点的分析,并且结合当前国内外高空作业车的市场,因此本次课题以自行直臂式高空作业车为研究对象,该作业车的系统全部由液压力提供动力。
2.2 高空作业车主要机构设计
2.2.1 行走机构
自行直臂式高空作业车的行走驱动根据驱动轮的个数可以分为四轮驱动和二轮驱动。四轮驱动是依靠原动机通过一系列的能量转换和中间设备带动四个车轮转动。二轮驱动是只有两个车轮由原动机供能转动,剩余两个车轮安装转向装置,实现作业车的转向。经过分析本次的设计是由两个液压马达分别带动两个后车轮转动,而用两个双作用液压缸来控制两个前车轮的转向。车轮的制动由换向阀控制,当换向阀接通即向制动器提供压力油时,制动器打开,作业车可以正常行驶;当换向阀断开即制动器不通液压油时,在制动弹簧的作用下使马达制动。考虑到作业车行走速度比较低,固在液压马达和车轮之间装上一个轮边减速器,轮边减速器多数采用行星齿轮传动,起到减速增加扭矩的作用。
2.2.2 支撑机构
由于工作环境的不同,高空作业车可能处在不同的状态。在较好的水平地面作业时,整车处于水平的状态,稳定性可靠。若高空作业车在比较恶劣的环境中工作,地面坑坑洼洼或在斜坡上作业,各车轮受力将不平衡,车体也会有一定的倾斜角度,当作业高度很高时,可能会造成车体的倾覆。为保证高空作业车在恶劣环境工作时整车的稳定,确保工作人员的安全,需要在底盘上安装一个支撑系统,并且使用角度传感器调节液压阀阀芯的开口大小实现自动调平,使工作臂在工作之前让整车保持水平状态。支撑的方式主要有H型支撑和X型支撑,每个支撑腿分别由水平和竖直方向的两个液压缸来控制其运动距离,本次设计采用H型支撑方式。工作人员可根据工作的具体情况来调节水平方向的伸出距离,以保证整车的稳定。
2.2.3 回转机构
高空作业车在工作时,有时候仅仅通过工作臂的伸缩变幅无法使工作平台到达指定的工作位置,还需要依靠作业车上的回转机构使工作平台旋转一定的角度才能满足准确定位的要求。回转机构可以使作业车的工作效率有很大的提升,若没有回转机构,则需要通过改变整车的方向才能使工作平台达到指定的位置,这使得作业车的工作效率和稳定性会大大降低。因此回转机构在高空作业车上应用得非常广泛。为了使作业平台的工作范围尽可能的大,本课题设计的回转机构可以使工作臂绕回转中心轴正反360°转动,并且机构在作回转运动时,应该保证起动、回转、制动平稳。因此,在对回转系统研究设计时需要非常注意。回转机构大体可以分为三个部分,其原理如图2.1所示。
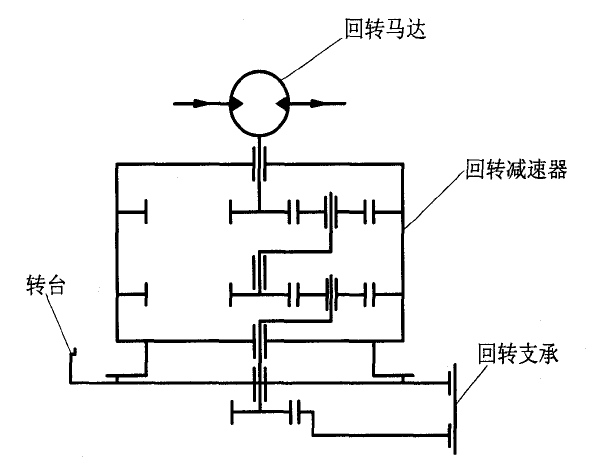
图2.1 回转机构原理图
(1)回转驱动装置。根据动力源不同,可以分为机械、液压、电力三种驱动方式。液压驱动相比其他驱动方式来说输送的扭矩大,可在高负载中稳定传输动力,并且控制方便。因此本课题选择的是液压驱动。
(2)回转减速机。可以将驱动装置传来的高速低扭矩转化为低速大扭矩。传动形式可以分为三种类型,分别是行星齿轮、摆线针轮和蜗轮蜗杆传动。本次课题选择的是行星齿轮传动。
(3)回转支承。回转系统通过减速机上的较小齿数的齿轮跟回转支承上齿数较多的大齿圈啮合,可以起到减速和固定的作用。
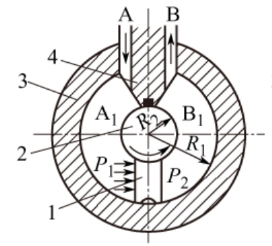
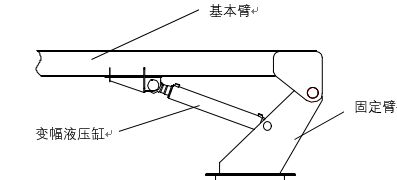
2.2.4 变幅机构
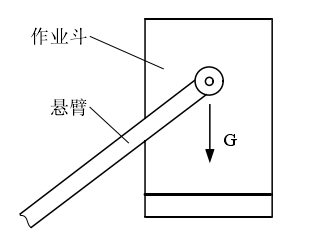
变幅机构是能够改变工作平台作业高度的重要装置,作业臂的变幅由一个液压缸来控制,操作原理为:液压缸一端跟固定臂铰接,另一端铰接在最外层的基本臂上。工作时,油液进入无杆腔,活塞杆在压力油的作用下克服负载伸出推动臂架绕铰接点转动,使工作平台上升;油液进入有杆腔,臂架反方向绕铰接点转动,使工作平台下降。在设计高空作业车时,工作臂的变幅角度是一个重要的技术参数,变幅角度可以根据设计需求选定,本次设计的变幅角度范围是:-12°~75°。当变幅角度为-12°时,工作臂处于全缩状态;当变幅角度为75°时,变幅液压缸活塞杆完全伸出,若伸缩臂也完全伸出,则工作平台可以达到最大工作高度。为保证工作过程中的高效性和稳定性,需要设计液压缸伸出和缩回的速度可以被调控,并且使液压系统稳定减少冲击。其原理如图2.2所示。
以上是毕业论文大纲或资料介绍,该课题完整毕业论文、开题报告、任务书、程序设计、图纸设计等资料请添加微信获取,微信号:bysjorg。
相关图片展示: