MQ4033门座起重机总体及变幅机构设计毕业论文
2020-02-19 19:20:17
摘 要
随着“一带一路”政策的贯彻实施,港口作为其中的重要枢纽从而得到了极大发展,港口机械的设计工作也越来越受到重视。其中门座起重机工作性能优越,四大工作机构又极具代表性。因此本设计以MQ4033门座起重机为例,介绍了门机的总体设计过程,包括工作机构及金属结构选型、各类载荷计算、整机稳定性校验等工作。另外本文着重对变幅驱动部分进行设计计算,包括用解析法计算各种变幅阻力以及电动机、减速器、制动器的选型和校验工作,并对变幅机构进行了三维建模以及运动仿真。
关键词:门座起重机;变幅机构;三维建模
Abstract
With the implementation of the "one belt and one way" policy, the port as an important hub has been greatly developed, and the design work of port machinery has been receiving more and more attention. Among them, portal crane has excellent working performance, and the four working mechanisms are very representative. Therefore, taking MQ4033 portal crane as an example, this design introduces the overall design process of portal crane, including the selection of working mechanism and metal structure, calculation of various loads, and stability check of the whole machine. In addition, this paper focuses on the design and calculation of the variable amplitude drive part, including calculating various variable amplitude resistance by analytic method, selecting and verifying the motor, reducer and brake, and carrying out three-dimensional modeling and motion simulation of the luffing mechanism.
Key Words:Portal crane;Luffing mechanism;Three-dimensional modeling
目 录
摘要 1
Abstract 2
第一章 绪论 5
1.1目的及意义 5
1.2国内外研究现状 5
1.3设计内容 5
第二章 MQ4033门座起重机总体设计 7
2.1 MQ4033门座起重机技术参数 7
2.2工作机构和金属结构选型 7
2.2.1工作机构选型 8
2.2.2金属结构选型 11
2.3载荷计算 14
2.3.1额定起升载荷 14
2.3.2自重载荷 14
2.3.3水平惯性力 16
2.3.4回转离心力 16
2.3.5物品偏摆载荷 16
2.3.6风载荷 17
2.4整机抗倾覆稳定性校验计算 24
2.4.1基本稳定性 25
2.4.2动态稳定性 25
2.4.3非工作时最大风载荷稳定性 26
2.4.4突然卸载时稳定性 26
2.5轮压计算 27
第三章 MQ4033门座起重机变幅机构设计 29
3.1变幅机构传动方案确定 29
3.2变幅驱动装置计算 29
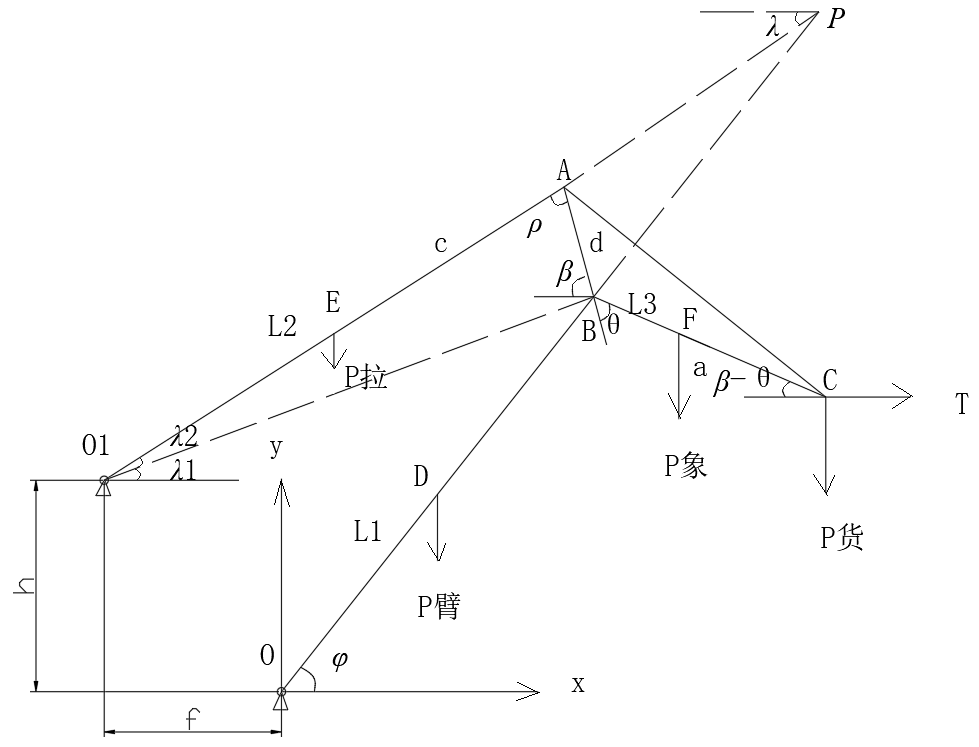
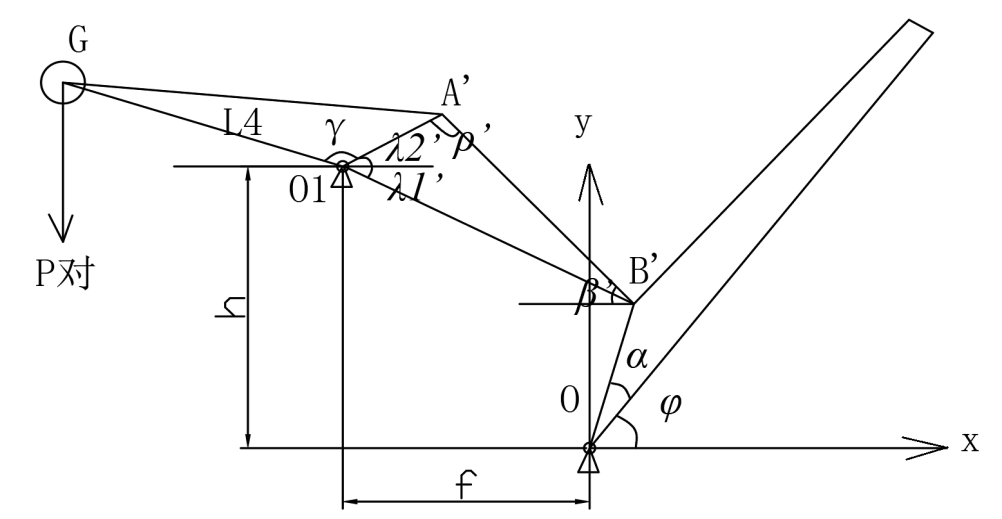
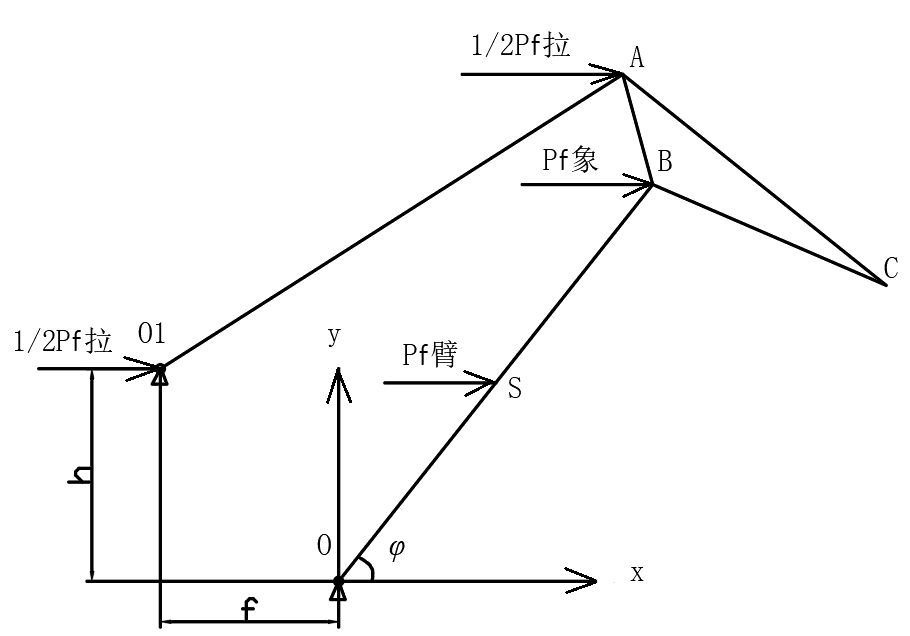
3.2.1变幅阻力分析 29
3.2.2计算载荷组合 34
3.2.3选择电动机 35
3.2.4选择减速器 37
3.2.5选择制动器 37
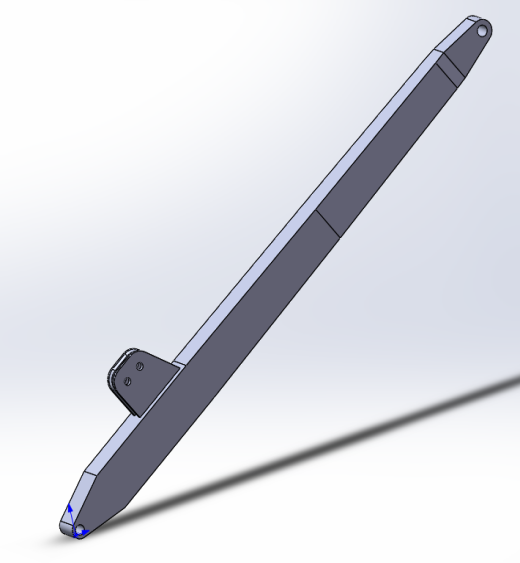
3.3变幅机构三维建模 38
3.3.1零部件建模 38
3.3.2装配与仿真 39
第四章 总结与展望 41
4.1工作总结 41
4.2工作展望 41
4.3经济性与环保性分析 41
参考文献 42
附录 43
致谢 45
第一章 绪论
1.1目的及意义
门座起重机广泛用于港口码头,它具有起重量大、投资成本低等优势,特别是它的四大工作机构极具代表性,因此以门座起重机作为选题非常有意义。变幅机构是改变起重机幅度的机构,它是臂架型起重机的主要工作机构。毕业设计进行门座式起重机总体及变幅机构的设计,对于一直学习港口机械的学生来说,不但可以检测对大学所学专业知识的掌握程度,还可以提高自己的动手和自学能力,是对本科阶段学习的一次深度总结。通过本次的总体设计以及变幅机构的建模,一定可以学到很多经验和方法,这对以后的学习和工作大有裨益。
1.2国内外研究现状
2018年度全球起重机制造商10强企业有利勃海尔、徐工集团、马尼托瓦克、特雷克斯、中联重科、多田野、三一重工、住友建机、神钢建机和加藤。其中欧美企业占据绝大多数,虽然我国拥有全球最大的起重机市场,但是我们仍然缺乏核心竞争力,其中发动机、电控系统以及液压组件限制了我国起重机的发展。
国内外对门座起重机及其变幅机构的研究从未止步。其中,针对门座起重机变幅机构两级制动的研究[7],郭燕、李勇智两位老师通过分析机构中的动能在制动期间的变化情况,确定了两级制动的设计计算准则。鲍善胜等人对于门座起重机四连杆臂架变幅多体动力影响的研究[8],是以变幅刚性四连杆为基础,通过力学矩阵推导其加速度和变幅惯性阻力,为门座起重机变幅驱动机构设计提供依据。还有刘钦澎等人研究了四连杆式门座起重机臂架及平衡系统[10],目的是降低四连杆门座起重机成本,对其臂架平衡系统进行了优化并提出一种改善的变幅轨迹计算的方法。还有国外Masanori、Narita [12]等学者,提出了一种基于参数相关函数的起重机增益调度控制设计方法,该方法考虑了起重机动力学的各种参数。因此,门座起重机还有很多值得研究和优化的地方。
1.3设计内容
本次毕业设计内容简言之就是门座起重机的总体设计以及变幅机构设计,具体设计内容以及工作思路见图1.1。
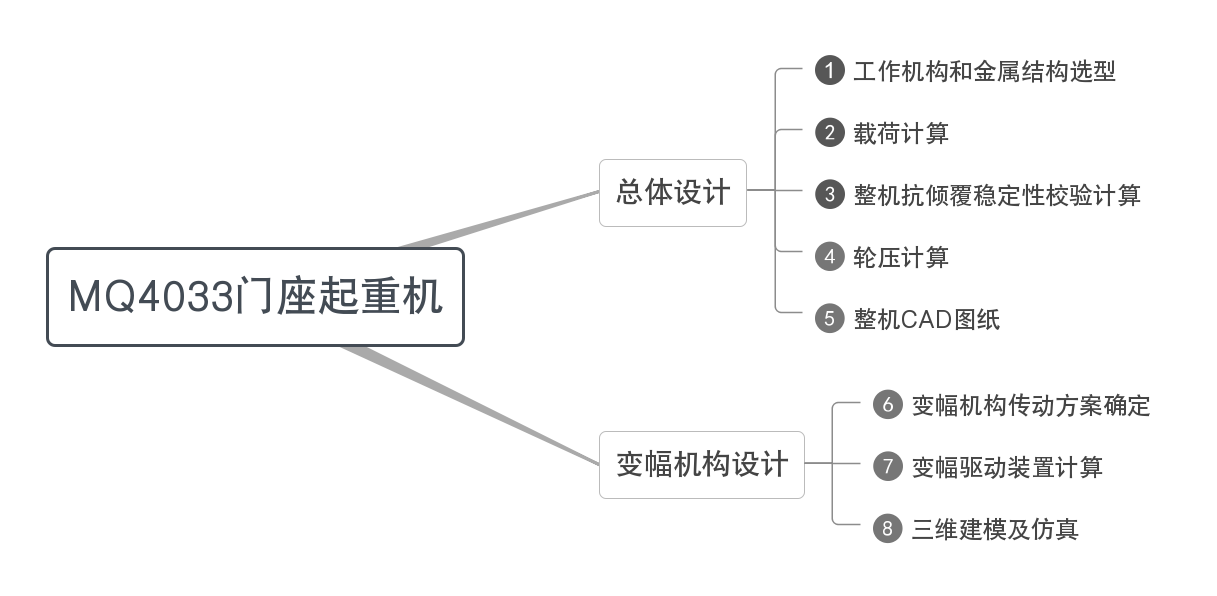
图1.1 设计思维导图
第二章 MQ4033门座起重机总体设计
2.1 MQ4033门座起重机技术参数
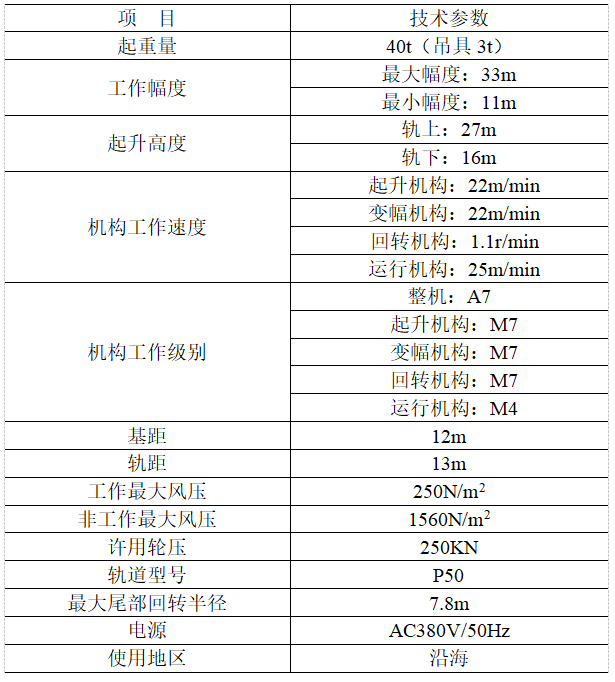
起重机的技术参数是设计起重机的根本依据,同时也反映出起重机的基本性能与作业能力。本次设计的MQ4033门座起重机的主要技术参数见表2.1。
表2.1 主要技术参数表
2.2工作机构和金属结构选型
MQ4033门座起重机主体组成部分是四大工作机构、金属结构、配套电气设备以及必要的安全辅助装置。其中工作机构有起升机构、运行机构、回转机构和变幅机构,金属结构有臂架系统、门架、人字架、回转平台、机器房、司机室、梯子栏杆等。
2.2.1工作机构选型
(1)起升机构
起升机构是实现物品上升与下降动作的机构,对于起重机械来说,它是不可或缺的一部分。起升机构包括驱动制动装置、钢丝绳卷绕系统、取物装置以及安全辅助装置等组成。
驱动装置(又称绞车)包括电动机、联轴器、制动器、减速器、卷筒等部件。港口起重机械常用的驱动装置形式为电机分别驱动,电动机驱动卷筒旋转,进一步带动钢丝绳卷入或卷出卷筒,实现了货物的起升或下降。除此之外,制动器可以使机构停止工作。钢丝绳卷绕系统是传动系统的组成部分,包括卷筒、钢丝绳、导向滑轮和滑轮组等。此门座起重机的钢丝绳滑轮组卷绕系统形式如图2.2。
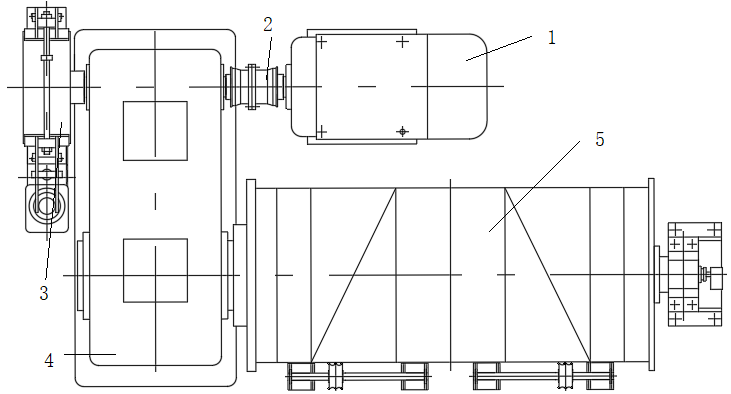
图2.1 起升驱动装置示意图
- 电动机;2-带制动轮的联轴器;3-制动器;4-减速器;5-双联卷筒
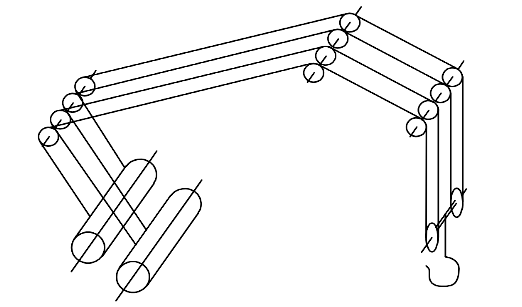
图2.2 钢丝绳卷绕系统示意图
(2)运行机构
运行机构主要用作水平运输货物,运行机构包括运行支承装置、运行驱动装置以及运行安全装置三部分。运行支承装置是用来支撑整机的重量,主要由轨道、车轮、均衡装置等组成;运行驱动装置帮助车轮克服运行阻力使其在轨道上移动;运行安全装置是用来保证起重机的安全运行。
本起重机运行机构采用分别驱动,驱动装置由三合一减速器、车轮组、开式齿轮、均衡梁等构成。总共有四个支腿,每个支腿上装有9个车轮,则总共车轮数为36个,其中驱动轮数占一半。为了应对暴风等恶劣天气,在车体上装有锚定装置、夹轨器、防风系缆装置等。
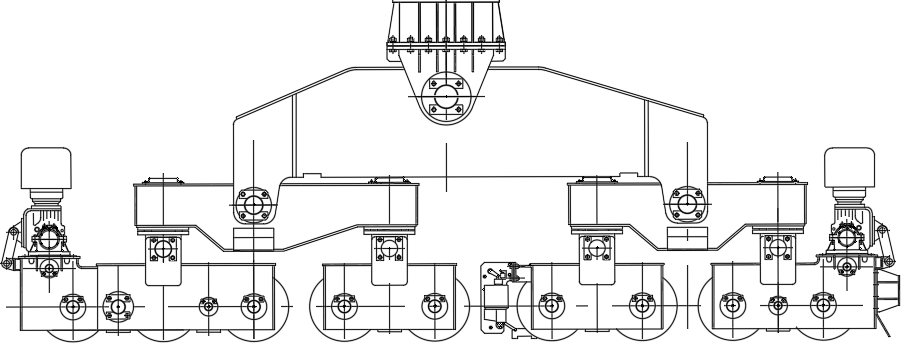
图2.3 运行机构简图
(3)回转机构
回转机构是回转类型起重机的主要机构之一,目的是使起重机的回转部分绕回转中心转动。回转机构包括回转支承装置和回转驱动装置两部分。
本次设计选用转盘式回转支承装置。转盘式相比柱式没有太高的立柱,回转部分放在一个转盘上,转盘通过滚动体支承在固定的部分。本次设计又进一步选用滚动轴承式回转支承装置,它的结构紧凑、运转平稳、性能完善、回转精度高、回转阻力小,还可以同时承受水平载荷、垂直载荷和倾覆力矩,因此,是应用最多的回转支承装置。
驱动装置选用立式电动机-行星齿轮减速器传动,两台驱动装置两侧对称布置。这种传动具有传动比大、结构紧凑、承载能力强等优势,其传递路径为:电机→极限力矩联轴器→制动器→行星齿轮减速器→末级小齿轮传动。另外回转机构制动器采用可操纵的常开式制动器,可避免制动过猛以及减小倾覆危险。
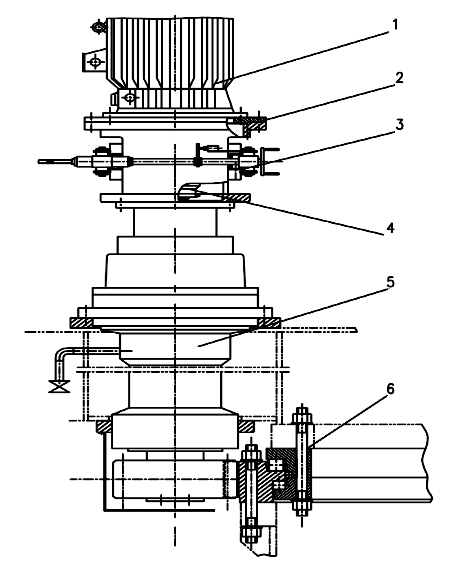
图2.4 回转机构布置图
1-电动机;2-上箱体;3-极限力矩联轴器;4-减速器;5-减速器;6-回转支承
(4)变幅机构
变幅机构是用来改变起重机幅度的机构,对于门座起重机而言,从回转中心线至取物装置中心线的距离即为起重机的幅度。变幅机构包括臂架及其平衡系统和变幅驱动系统两部分。
本机是平衡式变幅,即变幅过程中货物重心沿近似水平线的轨迹移动,并且臂架系统的合成重心高度基本不变。其中四连杆组合臂架系统保证了变幅过程中货物保持水平移动,采用杠杆-活对重平衡的方法又保证了臂架系统的重心沿近似水平线的轨迹移动。
变幅机构选用齿条驱动形式,传动系统主要包括电动机、传动轴、制动器、减速器、联轴器、小齿轮、齿条和摇架等。具体传动方案及传动过程见第三章3.1节。
- (b)
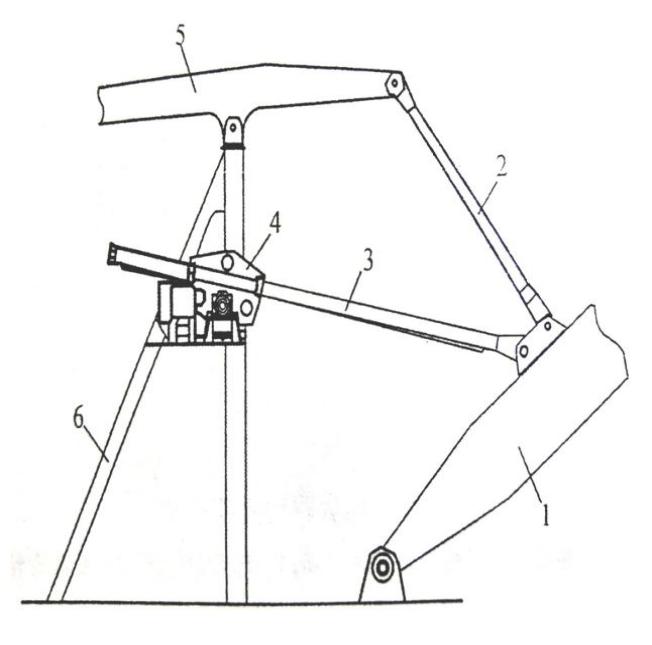
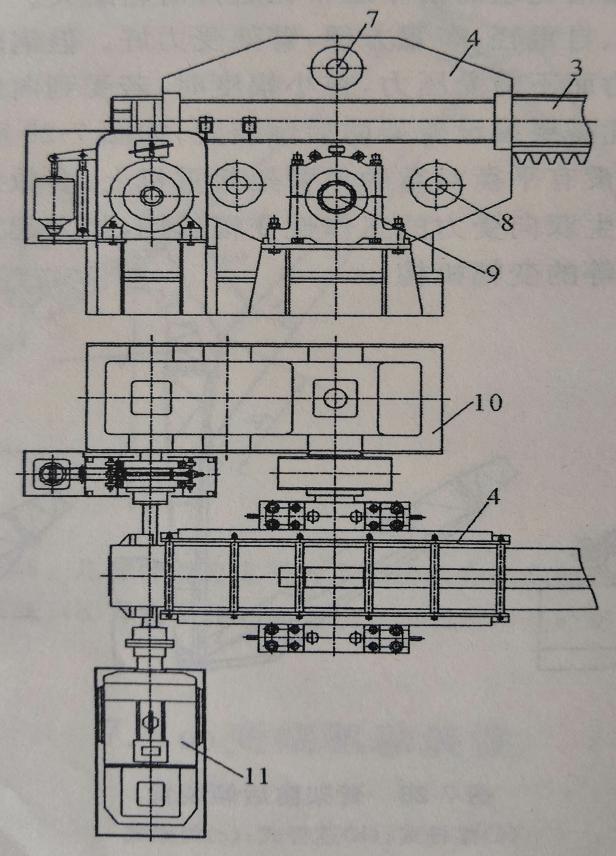
图2.5 齿条驱动变幅机构示意图
(a)齿条驱动变幅总图;(b)驱动装置布置图
- 臂架;2-小拉杆;3-齿条;4-摇架;5-平衡梁;6-人字架;
- 上压轮轴;8-下压轮轴;9-小齿轮轴;10-减速器;11-电动机
2.2.2金属结构选型
起重机的金属结构是起重机极其重要的一部分,它可以用来承载起重机的机械和电器等设备,承受或传递各种载荷。起重机金属结构形式虽然各不相同,但都由基本受力构件构成,这些基本受力构件分三类,分别是轴心受力构件、受弯构件以及压弯构件。
金属结构应满足工艺性好、性能良好、坚固耐用、构造合理、造型美观等基本要求。金属结构的主要连接方法有:焊接连接、螺栓连接以及销轴连接,其中焊接连接和螺栓连接是起重机中最常用的连接方法。焊接特点是省料、省工、易于实现自动化施工,还能减轻结构自重,因而是应用最广泛的金属结构连接方法。螺栓连接特点是可拆卸、装配方便、迅速且质量可靠,因而主要用于结构的安装连接特别是可拆卸的结构中。
下面对门机的主要金属结构进行选型。
(1)臂架及其平衡系统
本设计采用刚性四连杆组合臂架系统,它由主臂架、大小拉杆、象鼻梁通过铰接连接而成。其中象鼻梁选用箱型结构,这样具有良好的空间刚性;主臂架选用箱型实体式,并且为了达到稳定性和构造要求,箱型内部焊接了纵筋和横隔板;大拉杆选用带导流孔的实腹式结构,导流孔是为了减小风载荷的影响;小拉杆是用来连接臂架与平衡梁的二力杆,连接点均用铰接,采用工字钢制作即可。另外采用刚性拉杆组合臂架补偿以及杠杆-活对重的方法保证了变幅平衡。
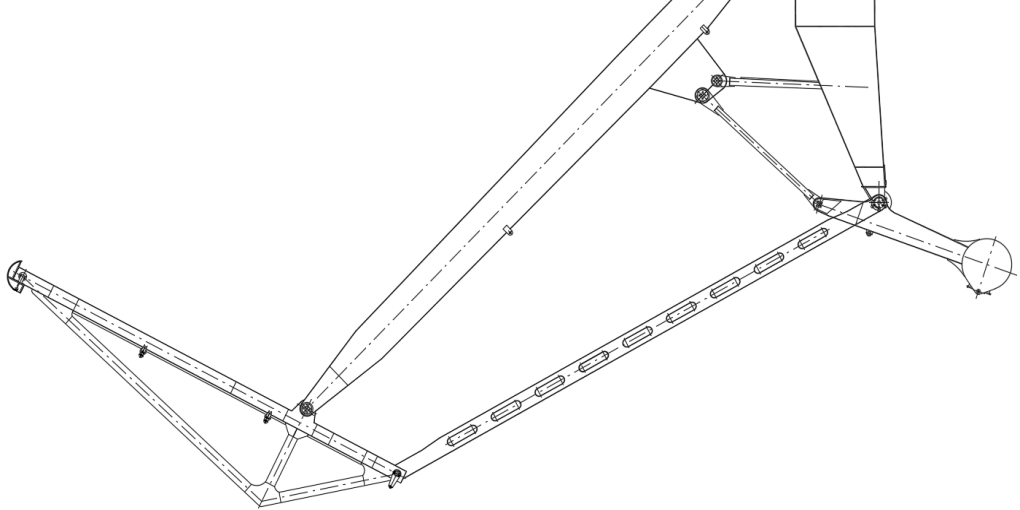
图2.6 臂架及其平衡系统简图
(2)人字架
人字架采用板梁式结构。该人字架是由板材围成的一个空心的、较大的四棱柱,前后两片大面积镂空但左右两侧基本是实腹式结构。这种结构简洁并且施工方便,可采用自动焊接来制造。
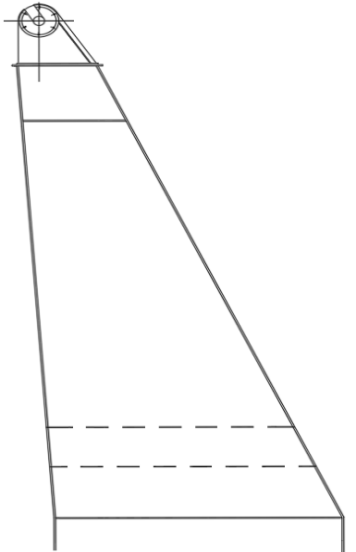
图2.7 人字架简图
(3)回转平台
回转平台通常由两根主梁和多根横梁并加以面板与筋板组成。主梁与横梁可设计成箱形截面梁,转台的尾部做成箱体,便于装载固定配重。另外转台正下方有一小节支撑圆筒与一个连接法兰,其中支撑圆筒深入到转台内部并与转台焊成一体,以改善传力条件。
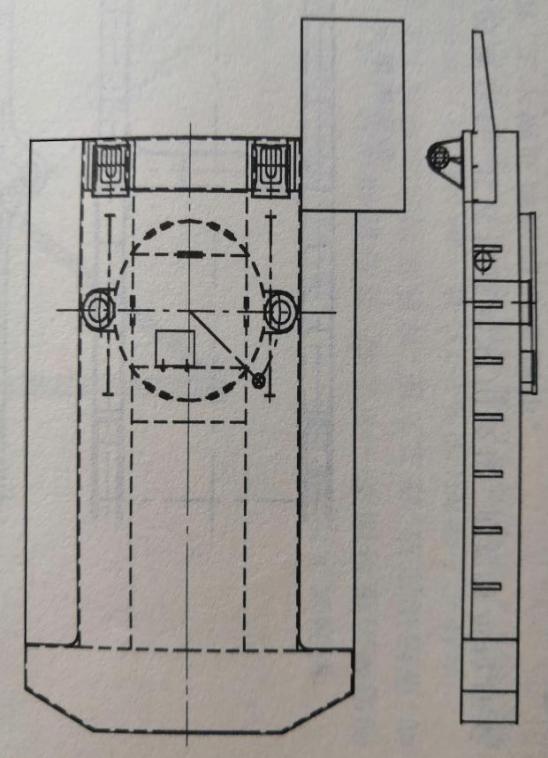
图2.8 回转平台简图
(4)门架
门架选用圆筒门架,其顶部是一个圆环形的法兰盘,中部是直圆筒。门架下部采用主、横梁结构,直圆筒下端插入到门架主梁的内部并与其焊接成为一个整体。圆筒门架具有风阻力较小、自重较轻等优点,因而在门机中应用较广。
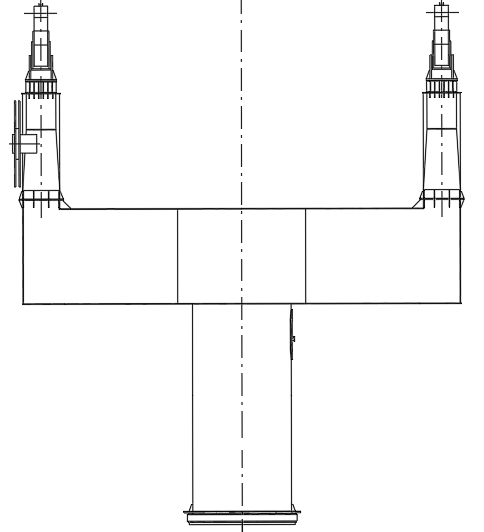
图2.9 圆筒门架简图
(5)机器房与司机室
机器房的内壁是多种型钢组成的骨架,外壁是由钢板拼接而成,机器房内还设有灭火器等装置。司机室的外壁由钢板焊接而成,能达到空间较大、水密性好、牢固、视野良好、采光充分等要求。司机室内部装有司机座椅、空调、操作台、对讲机等。
2.3载荷计算
安全可靠对于起重机械来说至关重要,因此必须要对起重机进行载荷计算。起重机的常见载荷有:额定起升载荷、自重载荷、水平惯性力、回转离心力、物品偏摆载荷、风载荷等。在起重机设计计算中,变化复杂的实际载荷只能通过简单的理论分析与实际经验相互借鉴的方法来确定,得到也仅仅是近似载荷亦称之为计算载荷。
2.3.1额定起升载荷
额定起升载荷PQ包括额定起重量以及取物装置(吊钩滑轮组、抓斗、起重横梁、容器或吸盘)的质量、悬挂着的挠性构件以及其他在升降过程中的设备质量。可忽略不计起升高度小于50米的起升钢丝绳的质量。本设计中,起重量为40t,吊钩重量3t,则起升载荷:
 (2.1)
(2.1)
2.3.2自重载荷
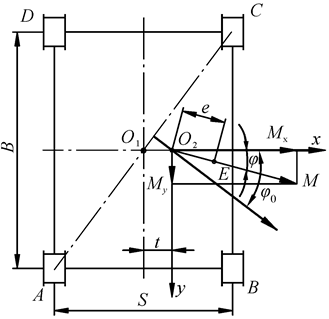
自重载荷PG包括起重机本身的结构、电气设备、机械设备等的重力。但规定起重机的起升质量重力除外。为估算门座起重机机各部分质心位置,结合整机结构基本对称布置的特点,可建坐标系如图2.10(以支承平面形心为坐标原点,以垂直于轨道方向为X轴,以垂直于整机对称面为Y轴,以垂直支承平面向上为Z轴),并得到门机各部分质量及质心位置表2.2。
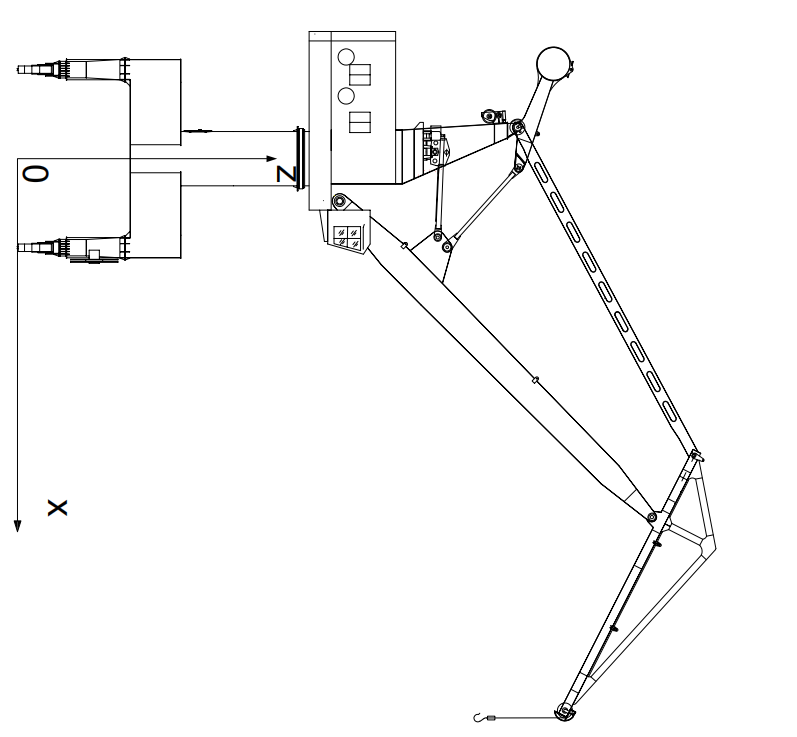
图2.10 坐标系示意图
表2.2 MQ4033门座起重机各部分质量及质心位置表
序号 | 部件 名称 | 质量 | Rmax=33m | Rmin=11m | ||||||
Xi | Gi*Xi | Zi | Gi*Zi | Xi | Gi*Xi | Zi | Gi*Zi | |||
Gi(t) | (m) | (t-m) | (m) | (t-m) | (m) | (t-m) | (m) | (t-m) | ||
1 | 货物 | 40.00 | 33.00 | 1320.00 | 25.00 | 1000.00 | 11.00 | 440.00 | 25.00 | 1000.00 |
2 | 吊具 | 3.00 | 33.00 | 99.00 | 27.00 | 81.00 | 11.00 | 33.00 | 27.00 | 81.00 |
3 | 象鼻梁 | 15.80 | 24.77 | 391.32 | 37.55 | 593.23 | 11.30 | 178.49 | 41.61 | 657.36 |
4 | 臂架总成 | 38.60 | 11.86 | 457.87 | 28.07 | 1083.50 | 6.13 | 236.54 | 32.64 | 1259.75 |
5 | 大拉杆 | 5.60 | 7.26 | 40.64 | 35.34 | 197.89 | 3.87 | 21.66 | 38.84 | 217.52 |
6 | 平衡梁 | 11.80 | -2.42 | -28.53 | 30.44 | 359.23 | -2.89 | -34.10 | 29.39 | 346.77 |
7 | 活对重 | 30.00 | -7.30 | -219.00 | 31.90 | 956.85 | -6.88 | -206.28 | 26.61 | 798.24 |
8 | 小拉杆 | 3.60 | 2.61 | 9.38 | 27.71 | 99.75 | 0.06 | 0.23 | 29.02 | 104.46 |
9 | 人字架 | 42.00 | -0.66 | -27.59 | 24.97 | 1048.70 | -0.66 | -27.59 | 24.97 | 1048.70 |
10 | 变幅机构 | 11.20 | 0.96 | 10.72 | 24.94 | 279.37 | -1.07 | -11.94 | 24.95 | 279.48 |
11 | 机器房 | 12.50 | -4.09 | -51.14 | 20.29 | 253.58 | -4.09 | -51.14 | 20.29 | 253.58 |
12 | 起升机构 | 26.30 | -5.29 | -139.02 | 18.96 | 498.54 | -5.29 | -139.02 | 18.96 | 498.54 |
13 | 回转机构 | 13.40 | 0.00 | 0.00 | 18.25 | 244.60 | 0.00 | 0.00 | 18.25 | 244.60 |
14 | 转台 | 53.60 | -3.50 | -187.60 | 17.80 | 954.08 | -3.50 | -187.60 | 17.80 | 954.08 |
15 | 配重 | 28.00 | -7.24 | -202.64 | 19.39 | 542.78 | -7.24 | -202.64 | 19.39 | 542.78 |
16 | 电控系统 | 7.20 | -3.90 | -28.04 | 20.23 | 145.68 | -3.90 | -28.04 | 20.23 | 145.68 |
17 | 司机室 | 2.60 | 4.16 | 10.81 | 19.58 | 50.92 | 4.16 | 10.81 | 19.58 | 50.92 |
回转部分小计(满载) | 345.20 | 4.21 | 1456.18 | 24.30 | 8389.70 | 0.09 | 32.37 | 24.58 | 8483.46 | |
回转部分小计(空载) | 305.20 | 0.45 | 136.18 | 24.21 | 7389.70 | -1.34 | -407.63 | 24.52 | 7483.46 | |
18 | 门架 | 70.00 | 0.00 | 0.00 | 9.23 | 645.89 | 0.00 | 0.00 | 9.23 | 645.89 |
19 | 电缆卷筒 | 1.20 | 2.04 | 2.44 | 7.46 | 8.95 | 2.04 | 2.44 | 7.46 | 8.95 |
20 | 运行机构 | 13.00 | 0.00 | 0.00 | 1.50 | 19.50 | 0.00 | 0.00 | 1.50 | 19.50 |
21 | 梯子平台 | 14.00 | 5.23 | 73.28 | 15.32 | 214.48 | 5.23 | 73.28 | 15.32 | 214.48 |
22 | 防爬锚定 | 1.60 | 0.00 | 0.00 | 0.73 | 1.16 | 0.00 | 0.00 | 0.73 | 1.16 |
固定部分小计 | 99.80 | 75.72 | 889.99 | 75.72 | 889.99 | |||||
合计(满载) | 445.00 | 3.44 | 1531.89 | 20.85 | 9279.69 | 0.24 | 108.09 | 21.06 | 9373.45 | |
合计(空载) | 405.00 | 0.52 | 211.89 | 20.44 | 8279.69 | -0.82 | -331.91 | 20.68 | 8373.45 | |
注:合成质心坐标公式:X=∑Gi*Xi/∑Gi,Y=∑Gi*Yi/∑Gi。
提取表2.2中的重要信息,汇总得到表2.3。
以上是毕业论文大纲或资料介绍,该课题完整毕业论文、开题报告、任务书、程序设计、图纸设计等资料请添加微信获取,微信号:bysjorg。
相关图片展示: