基于贝叶斯网络的L3级自动驾驶汽车故障诊断研究毕业论文
2020-02-17 19:23:11
摘 要
本文以目前主要研究的L3级自动驾驶为目标,以可以适用于L3级自动驾驶的电子液压制动(EHB)系统为例,建立了一个故障诊断系统,并使用故障诊断系统给出的结果和操作建议指导L3级自动驾驶汽车自动采取一系列的操作来保障行车安全。本文研究了适用于L3级自动驾驶的故障诊断方法,深入分析系统内各部件的故障特点,使用贝叶斯网络作为诊断系统的底层构架,结合故障数据结构学习和专家经验对网络进行建模和优化,并利用数据库技术对故障数据进行实时收集和对贝叶斯网络进行实时更新,这样故障诊断的准确性将随着故障数据的增加将不断提升。
论文的大概研究内容如下:
(1)对EHB系统故障数据进行挖掘,对其结构及原理进行探究,获得故障诊断知识库。
(2)利用贝叶斯网络设计了EHB系统的故障诊断模型,以实现核心的故障诊断系统。
(3)利用C 语言完成设计了一个基于贝叶斯网络模型的L3级自动驾驶故障诊断系统,并结合数据库技术和网络通信能对贝叶斯网络进行实时更新。
本文提出的故障诊断框架和设计完成的工具,实现了从贝叶斯网络故障诊断的理论分析到L3级自动驾驶故障诊断应用的转化,相比于传统的汽车故障诊断系统,可以有效提高汽车诊断系统的诊断速度和正确率。此系统能有效利用自动驾驶系统中传感器收集到的数据并利用执行器保障行车安全,为自动驾驶技术的现实运用和发展提高有力的支撑。
关键词:贝叶斯网络;自动驾驶;故障诊断;电子液压制动
Abstract
This paper aiming at the current research on L3 automatic driving, taking an electronic hydraulic brake (EHB) system that can be applied to L3 automatic driving as an example, a fault diagnosis system is established, and the results of the fault diagnosis system are used. Operational recommendations guide the L3 self-driving car to automatically take a series of operations to ensure driving safety. This paper studies the fault diagnosis method for L3 automatic driving, analyzes the fault characteristics of each component in the system, uses Bayesian network as the underlying framework of the diagnostic system, combines fault data structure learning and expert experience to model the network. Using database technology to collect fault data in real time and update the Bayesian network in real time, so the accuracy of fault diagnosis will continue to increase with the increase of fault data.
The approximate research content of the paper is as follows:
(1) Excavate the fault data of EHB system, explore its structure and principle, and obtain the fault diagnosis knowledge base.
(2) The fault diagnosis model of EHB system is designed by Bayesian network to realize the core fault diagnosis system.
(3) A L3-level automatic driving fault diagnosis system based on Bayesian network model is designed by using C language. The Bayesian network can be updated in real time by combining database technology and network communication.
The fault diagnosis framework and design completion tools proposed in this paper realize the transformation from Bayerian network fault diagnosis theory analysis to L3 level automatic driving fault diagnosis application. Compared with the traditional automobile fault diagnosis system, it can effectively improve the vehicle diagnosis. The diagnostic speed and correct rate of the system. The system can effectively utilize the data collected by the sensors in the automatic driving system and use the actuator to ensure driving safety, which provides a strong support for the practical application and development of the automatic driving technology.
Key Words:Bayesian Network; Automatic Driving; Fault Diagnosis; Electronic Hydraulic Brake
目 录
第1章 绪论 1
1.1 研究背景及意义 1
1.1.1 本文研究背景 1
1.1.2 本文的研究意义 2
1.2 国内外研究现状 2
1.2.1 汽车故障诊断方法现状 2
1.2.2 EHB系统发展现状 3
1.2.3 贝叶斯网络故障诊断研究现状 4
1.3 论文的主要工作及结构安排 4
第2章 EHB系统故障数据挖掘 6
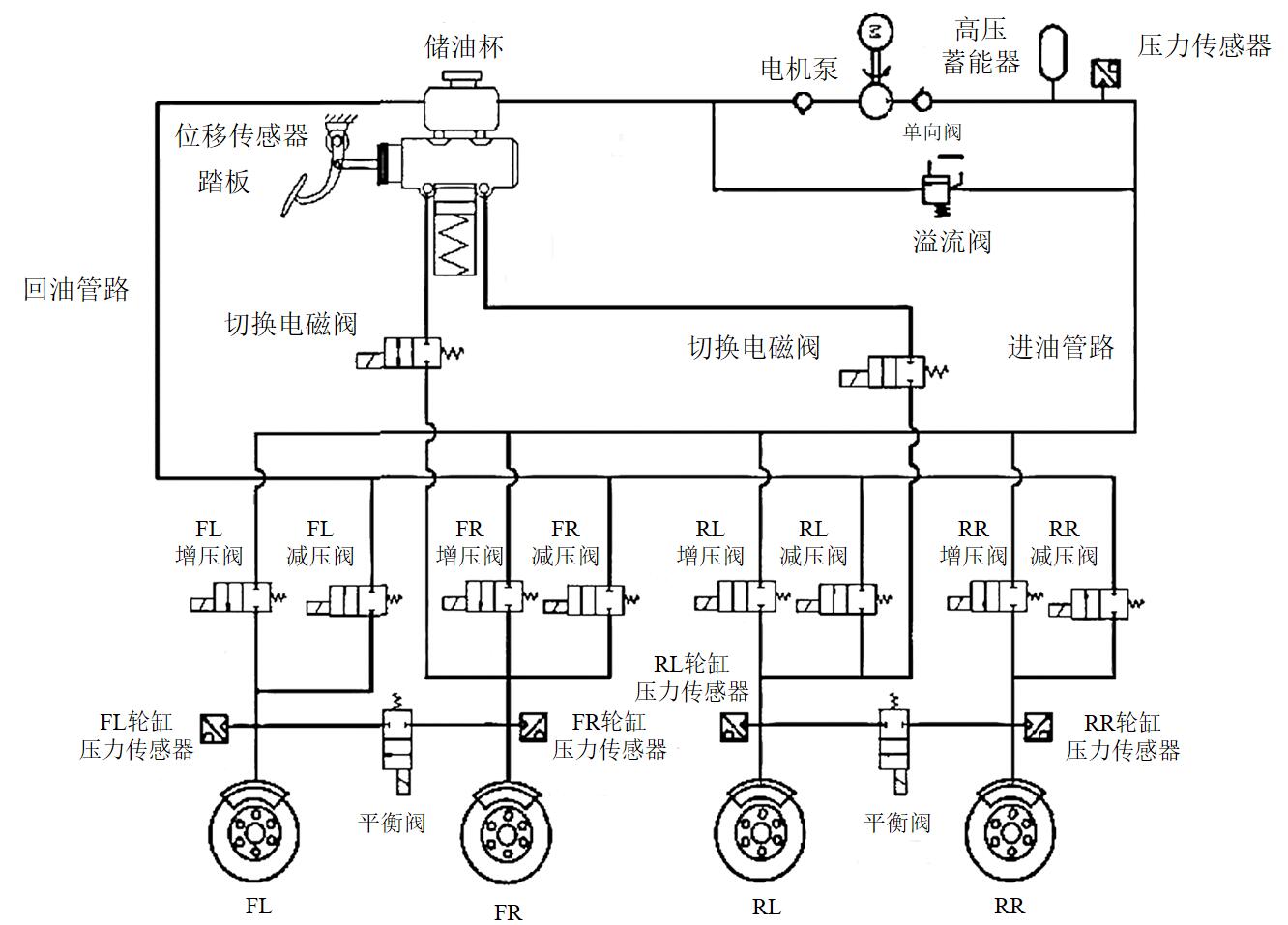
2.1 EHB系统结构及工作原理 6
2.1.1 EHB系统结构 6
2.1.2 EHB系统工作原理 8
2.2 EHB系统故障数据 9
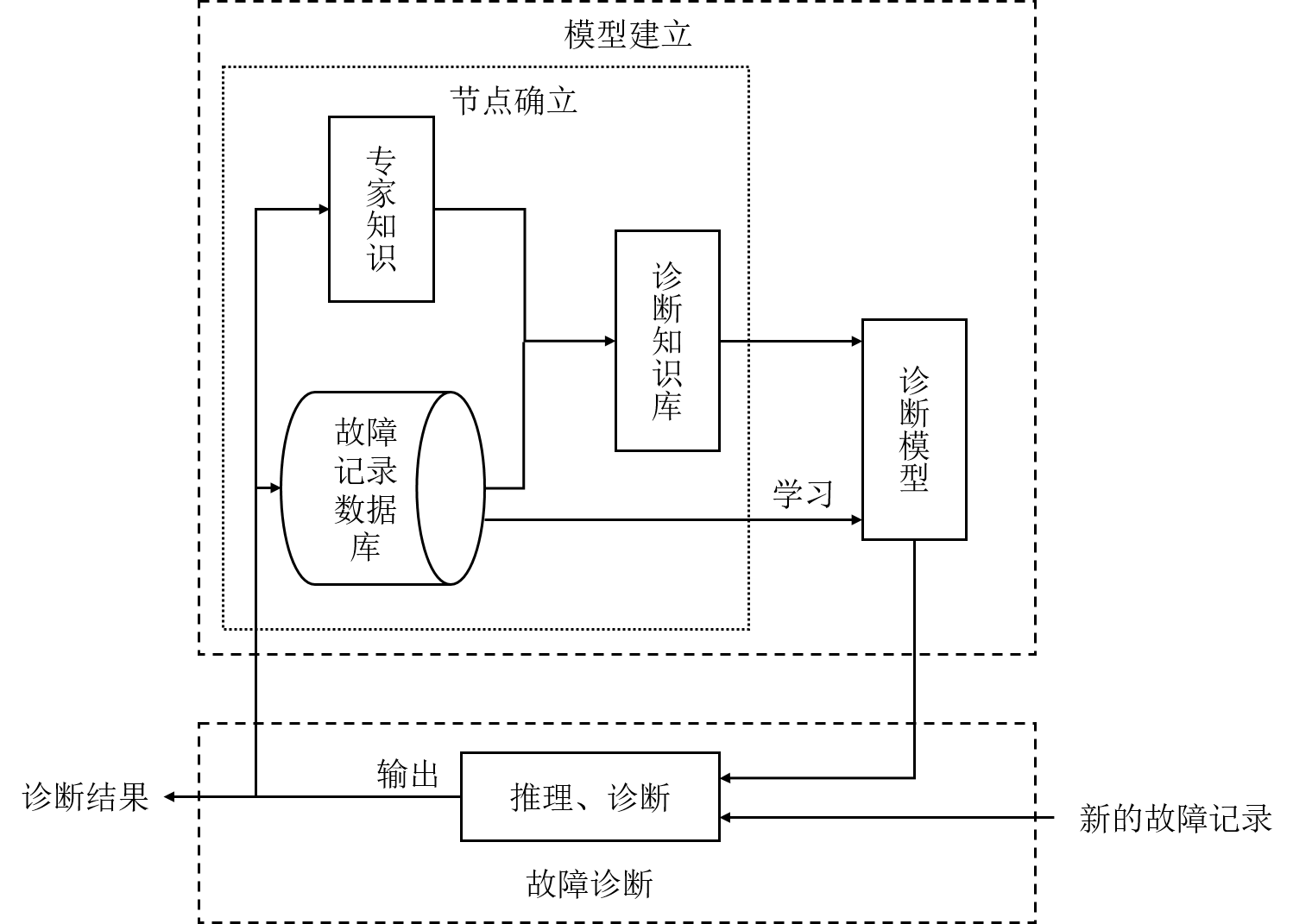
2.3 EHB系统故障诊断框架 13
2.4 本章小结 15
第3章 基于贝叶斯网络的EHB系统故障诊断 16
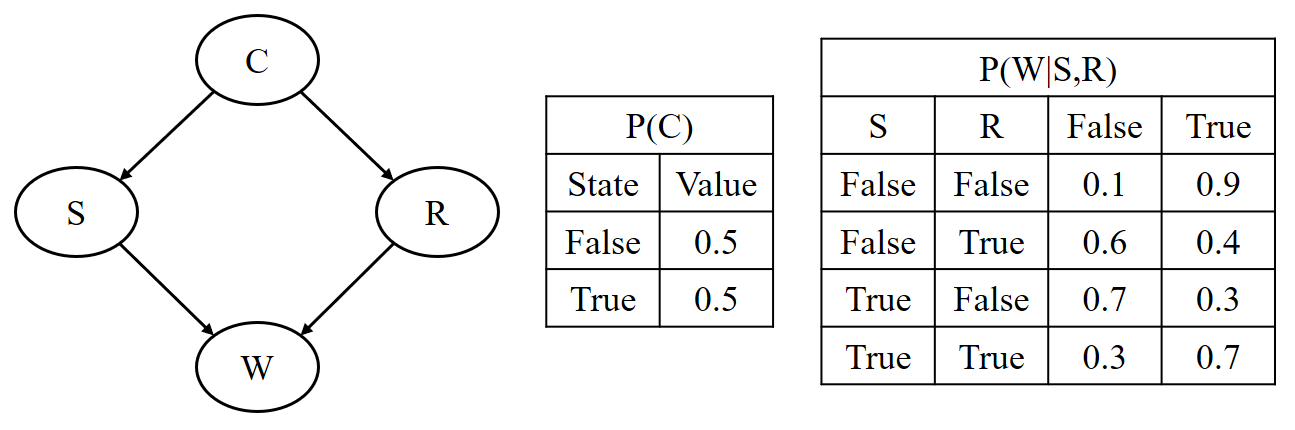
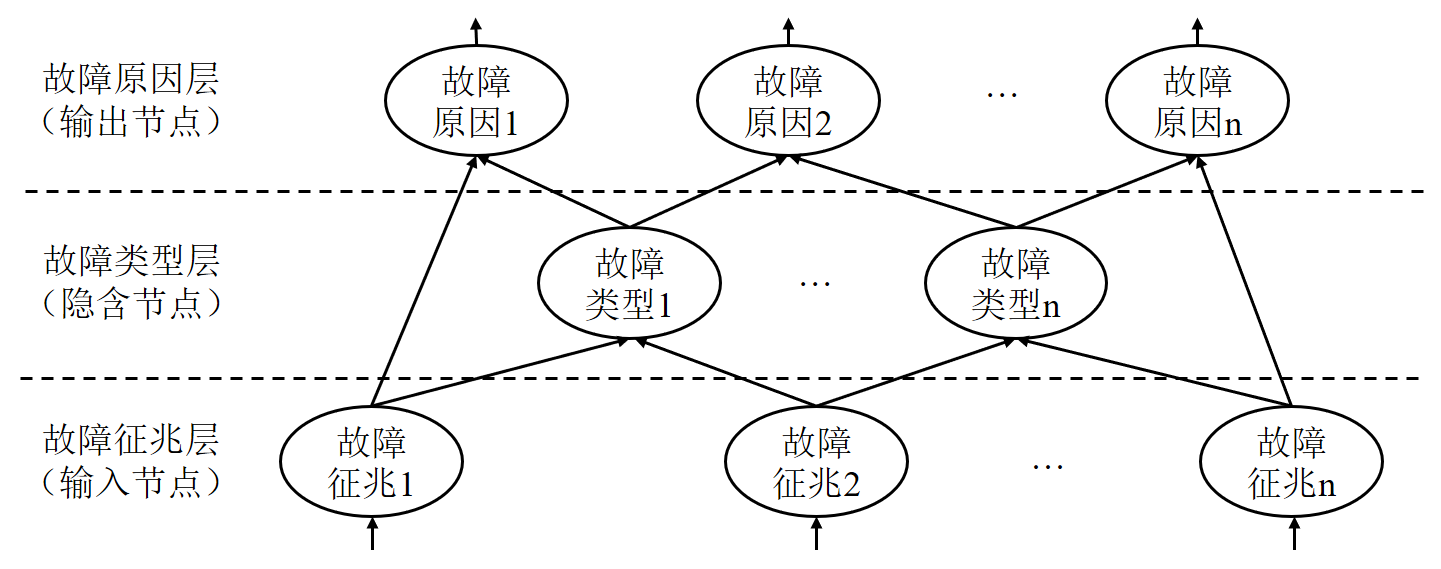
3.1 贝叶斯网络故障诊断模型建立 17
3.1.1 基于专家经验的模型建立 21
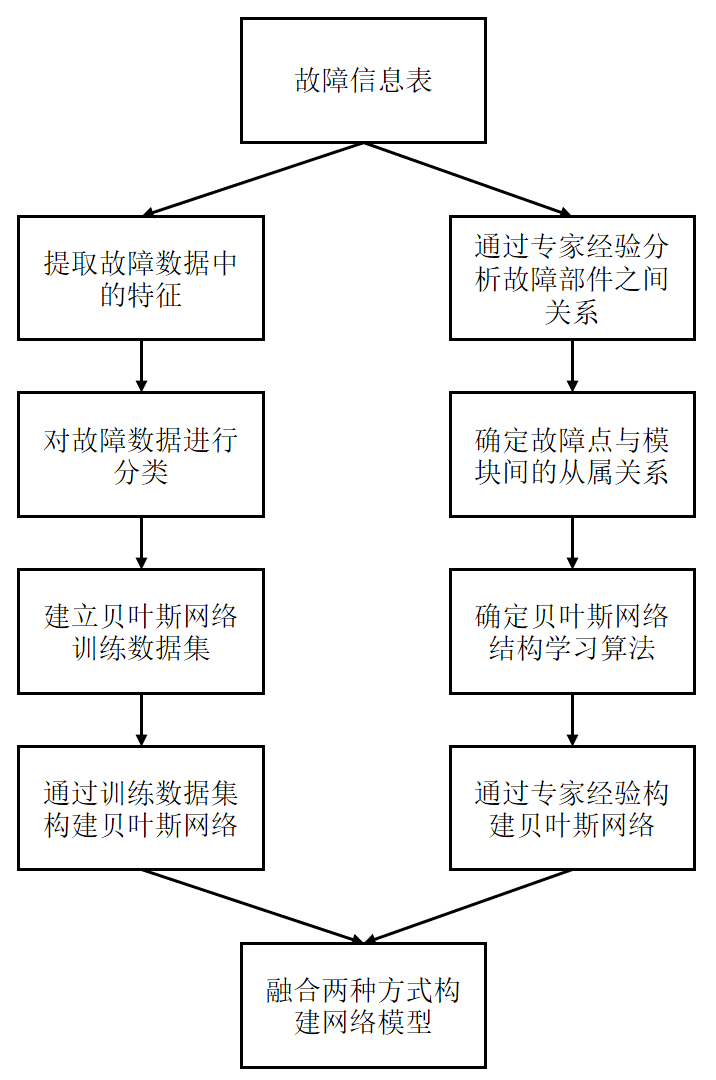
3.1.2 融合结构学习对模型优化 30
3.2 贝叶斯网络模型参数学习 40
3.3 贝叶斯网络故障诊断推理 44
3.4 本章小结 48
第4章 L3级自动驾驶制动系统基于贝叶斯网络的实现 49
4.1 诊断系统需求分析 49
4.1.1 功能性需求分析 49
4.1.2 非功能性需求分析 51
4.1.3 故障诊断系统的运行环境需求 51
4.2 故障诊断系统总体方案 52
4.2.1 系统框架设计 52
4.2.2 故障诊断流程 53
4.3 故障诊断系统的设计与实现 55
4.3.1 C 底层框架设计 55
4.3.2 数据库的设计与实现 56
4.3.3 Qt设计用户界面 56
4.4 本章小结 58
第5章 总结与展望 59
5.1 总结 59
5.2 展望 59
参考文献 61
致 谢 64
绪论
- 研究背景及意义
- 本文研究背景
- 研究背景及意义
随着全球汽车行业的迅猛发展,全球的汽车产销量节节攀升,汽车早已融入社会的方方面面。其中中国的汽车产业发展最快,汽车正慢慢称为普通大众所能日常使用的工具。随着机器学习及人工智能技术的日新月异,汽车行业也面临着新的一个挑战。当前汽车已完善了复杂的机械结构,产业的创新力已向汽车上的电控技术转移,为汽车产业不断带来新的生命力和冲击,也不断利用新技术来保障乘客的行车安全。然而传统的汽车主要的感知及操作靠人来完成,驾驶员需要时刻保持高度的精神集中以实时处理行车时的各种状况来保障行车安全。天气状况、路面状况、汽车零部件的故障都会影响驾驶员的操作,由于人的感知分析能力的限制,在汽车系统部件越来越多时,驾驶员还能时刻面对发生的故障采取正确的措施显得越来越困难。因此为了最大可能保障行车安全,将驾驶员的一部分故障诊断能力通过计算机进行量化控制,能降低驾驶员的驾驶难度,降低事故发生的可能性。
随着越来越多的电子及软件技术在汽车上的运用,无人驾驶技术的实现逐渐有了希望。随着无人驾驶能力的提升,汽车行驶将更加的安全高效,也让驾驶者缓解精神高度集中的驾驶状态。为此,美国交通部国家公路运输安全局(NHTSA)与SAE定义了5个级别的自动驾驶[1],如表1.1所示。
表 1.1 自动驾驶的分级
级别 | 概念 | 感知 主体 | 决策 主体 | 执行 主体 |
L0无自动化 | 全由人类驾驶 | 人 | 人 | 人 |
L1驾驶支持 | 简单的对一项操作提供帮助,如初级的定速巡航。 | 人 | 人 | 人和车 |
L2部分自动化 | 实现一些基础的自动控制,能进行多项操作,如自适应巡航、车道保持等。 | 人 | 人 | 车 |
L3有条件自动化 | 无人驾驶系统完成所有驾驶操作,驾驶员在必要的时候可以随时接管。 | 车 | 人 | 车 |
L4高度自动化 | 无人驾驶系统完成所有操作,不期望驾驶员应答,可无方向盘,一般在限定区域。 | 车 | 车 | 车 |
L5完全自动化 | 可以在任何地方,由无人驾驶系统完成全部驾驶操作。 | 车 | 车 | 车 |
可以看到,自L3级自动驾驶开始,汽车的感知主体由人变为了车,执行主体也是汽车,汽车驾驶已经相比于传统的汽车驾驶发生了巨大的变化,汽车上的各个系统部件的数量也大幅提升,普通的驾驶者基本上已经很难对所有的汽车零部件故障进行诊断。因此在L3级自动驾驶下,如何实时快速地进行故障诊断,并根据故障诊断结果自动采取一系列措施,保障行车安全显得尤为重要。
本文的研究意义
虽然目前对于无人驾驶汽车的研究较多,但各学校对无人驾驶的探讨聚焦在环境感知和决策控制上,对保障无人驾驶的行车安全研究较少。因此本文基于贝叶斯网络,以可以运用在L3级自动驾驶汽车上的EHB系统为例,建立了一个快速的、可联网实时更新的诊断系统,并对L3级自动驾驶汽车的故障诊断系统进行了构思和探讨,能够对更高级的无人驾驶的故障诊断提供依据。
国内外研究现状
汽车故障诊断方法现状
汽车故障征兆各种各样,一般是由人来观察故障发生的现象,然后做出分析判断进行故障诊断。随着其电气化的进程,汽车内系统的复杂程度也大幅提升,原始的人工分析问题显然已跟不上复杂的系统故障诊断问题,所以对于汽车的故障诊断尤其是自动驾驶汽车要求越来越高。
从汽车故障诊断的进程来看,其具有四个阶段[2]:
(1)人工经验分析
20世纪50年代前,汽车零部件数量相对少,功能单一,人工能够顺利完成汽车故障的分析。人工分析的方法对于现在的汽车诊断也具有一定的作用。
(2)简单的故障诊断
随着汽车电气发展,20世纪60年代,初级故障诊断系统在国外的发达国家得到了开发,即通过汽车仪表盘指示灯来反应汽车系统故障现象。很多简单的仪器被用于故障诊断,如电压表、示波器等。我国的不解体维修检测技术的开发与70年代也开始进行。
(3)精密的仪器诊断
20世纪80年代,串行通信被使用到诊断技术中,可以通过OBD接口监测排放系统,即OBD-I系统,其只能对排放相关部件进行检测,诊断功能不完善。汽车工程师协会(SAE)对通信协议、诊断接口等技术进一步标准化,研发出了ODB-II系统[3]。其规范了指示灯、通信协议及故障码,提供了更多的接口以供外部读取数据。国内在这一时期也对汽车诊断技术做了很多研究工作,发展迅速。随着计算机技术的不断应用,故障诊断准确率也不断提高,开发出了很多专用的精密监测设备,如发动机分析仪等。
(4)人工智能诊断
21世纪开始,汽车上的电子设备不断增加,内部各系统也日益复杂。并且随着无人驾驶快速发展,如何保障无人驾驶下的行车安全和故障诊断是一个重大的问题,也牵制着无人驾驶技术的发展,这对故障检测系统提出了新的难题。随着人工智能、网络通信、神经网络、机器学习等技术逐步在汽车诊断中得到运用,新的技术将解决复杂的汽车系统,并进一步提高故障诊断的可靠性。
EHB系统发展现状
2000年,电子液压制动系统(EHB, Electro hydraulic Brake System)系统走向成熟,开始市场化。较为运用广泛的产品有丰田公司的ECB系统,奔驰和博世公司的SBC系统以及大陆公司的RBS系统。
随着汽车自动驾驶技术的发展和对制动系统线控的要求,无人驾驶技术对EHB系统给予了新的意义和挑战,可线控的制动系统的监测和快速诊断问题日益突出。
电子液压制动系统(EHB, Electro hydraulic Brake System)结合了传统的液压制动和电控技术,通过 EHB电机对液压油加压,通过高压蓄能器储存起来,用电磁阀对每个车轮管路的制动压力精确单独调节,通过压力传感器检测出实际轮缸制动压力,实现各车轮制动力的闭环控制[4]。
当前EHB系统已成为国内外研究热点之一。Huh K, Han K, Hong D等[5]为EHB系统开发了基于模型的故障诊断系统。使用冗余方法和基于模型的故障诊断系统对制动状态进行了监控。Cheon J S等[6]对线控系统BBW基于ASIL(汽车安全完整性等级)分类的危险分析和风险评估。基于ISO26262针对BBW系统研究了功能安全的概念设计,初步定义了功能系统架构的安全目标和安全要求,并且针对一些示例性情况,即制动执行器或踏板模拟器的故障情况,对车辆到子系统级别执行ASIL分配和分解过程。
虽然国外某些车型已经安装有EHB系统,例如丰田普锐斯。但是目前EHB系统的设计理论方法国内处于研究阶段, EHB系统在中国的产业化发展还有很长的路走,对于EHB系统的安全性也应该要重点研究。
以上是毕业论文大纲或资料介绍,该课题完整毕业论文、开题报告、任务书、程序设计、图纸设计等资料请添加微信获取,微信号:bysjorg。
相关图片展示: