2.0T福特蒙迪欧前照灯逆向设计毕业论文
2020-02-17 12:47:50
摘 要
汽车前照灯的零部件具有十分复杂的表面结构,在进行逆向设计时,需要大量的时间和精力,找到合适的构面方法,使得所拟合的面片贴近原有模型。蒙迪欧前照灯还包括随动转向模块,由步进电机驱动随动框架旋转,需要验证其结构可靠性。本文围绕逆向工程在前照灯设计中的应用以及随动转向模块的静力学仿真进行研究并做出以下工作:
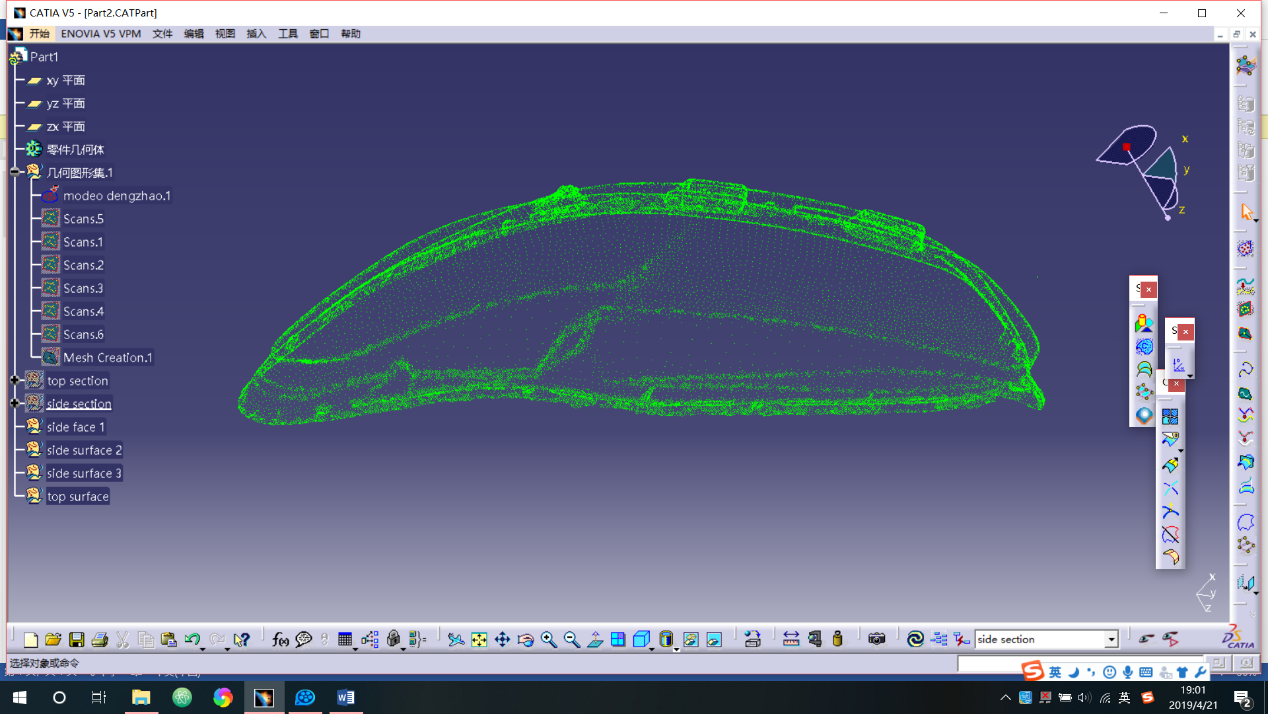
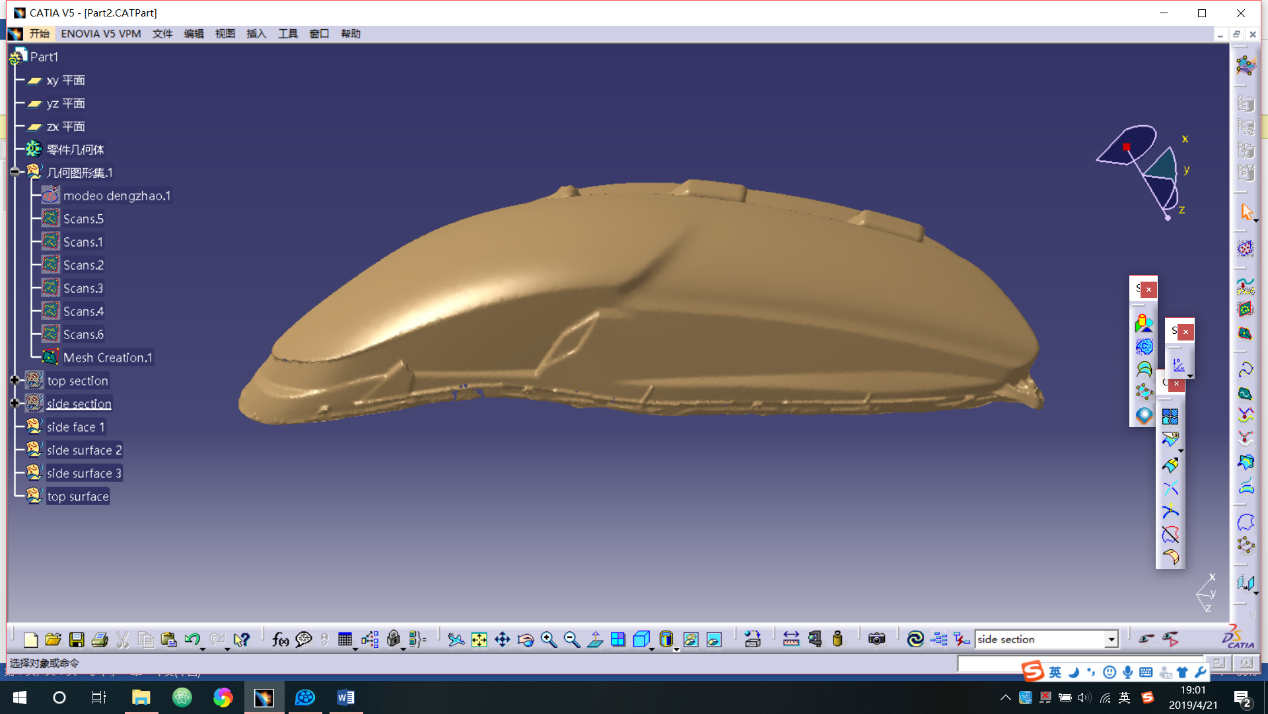
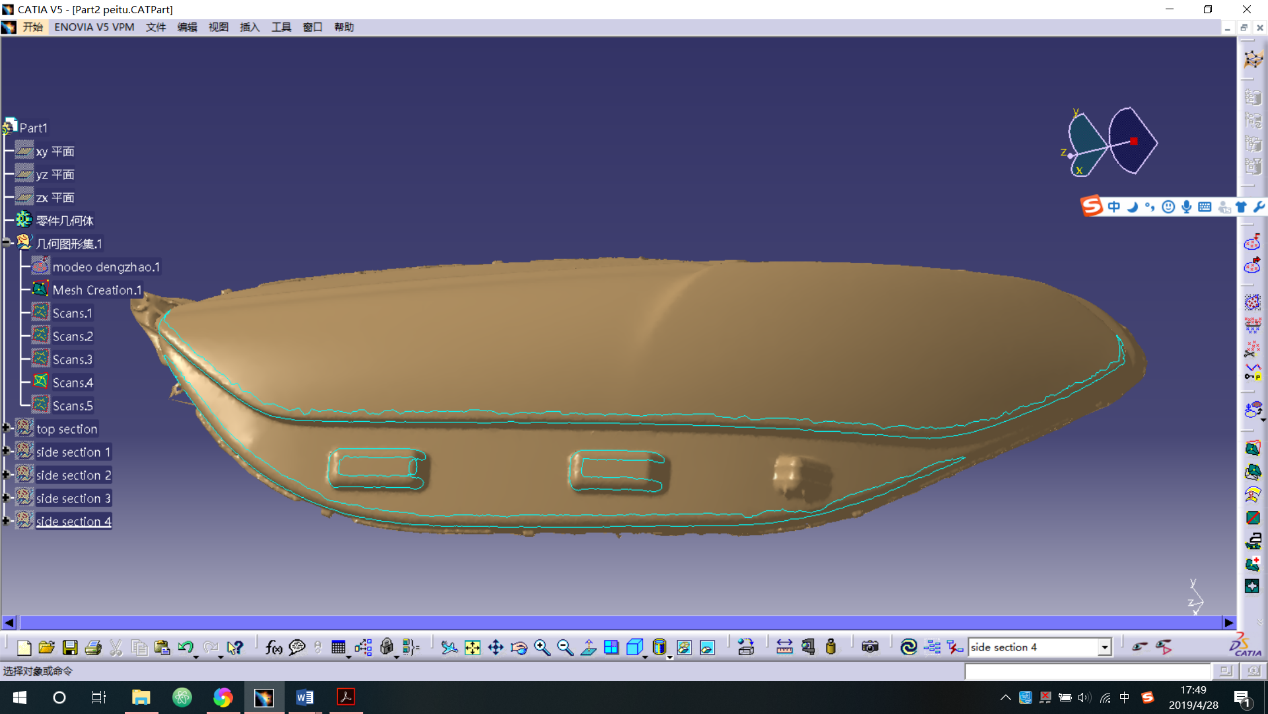
使用手持激光扫描仪采集前照灯各个零件的外表面点云数据,使用CATIA中的Digitized Shape Editor(数字形状编辑)对采集到的点云数据进行了数据处理,手动去除杂点噪点,并精简点云数据。使用Quick Surface Reconstruction(快速曲面重构)以及Generative Shape Design(创成式外观设计)重构出了前照灯零部件三维模型。测量了随动转向模块各个零件尺寸,采用实体建模方法构建出了随动转向控制器三维模型。
针对以上构建的随动转向控制器模型,运用有限元分析方法,使用Ansys Workbench建立有限元分析模型,对随动转向模块进行了静力学分析,得到了关键零件的应力云图,找到了零件受力薄弱处。
关键词:前照灯;逆向工程;AFS;有限元;静力学分析
Abstract
The parts of the car headlights have a very complicated surface structure. When performing the reverse design, it takes a lot of time and effort to find a suitable facet method, so that the fitted face piece is close to the original model. The Mondeo headlamps also include a follow-up steering module that is driven by a stepper motor to rotate the follower frame, which requires verification of its structural reliability. This paper focuses on the application of reverse engineering in the design of headlamps and the static simulation of the follow-up steering module and does the following work:
Use the handheld laser scanner to collect the external surface point cloud data of each part of the headlights; Use the Digitized Shape Editor in CATIA to process the collected point cloud data, and manually remove the noise and simplify Point cloud data. The 3D model of the headlamp component was reconstructed by using Quick Surface Reconstruction and Generative Shape Design. The dimensions of each part of the follow-up steering module are measured, and the three-dimensional model of the follow-up steering controller is constructed by the solid modeling method.
According to the above-mentioned follow-up steering controller model, the finite element analysis method was used to establish the finite element analysis model with Ansys Workbench. The static analysis of the follow-up steering module was carried out, and the stress cloud of the key parts was obtained, which indicates weak place of the parts.
Key words: headlights;reverse engineering;AFS;finite element;static analysis
第1章 绪论
研究背景
汽车前照灯的一般设计流程分为:标准化光源型号的选定;透镜和反射镜的设计;前照灯造型设计。针对于具体车型尺寸及照明要求,可以快速确定标准化光源的类型,而对于不同光学结构的前照灯系统,其反射镜设计和壳体设计才是最关键也是最困难的环节。国外专业前照灯公司已经研制开发出前照灯专用设计软件,可以根据汽车外形尺寸及光学性能要求,自动得到最优化的反射体结构,并且在前照灯底座和灯罩壳体的设计上积累了大量的经验。国内如果要设计一款全新的前照灯,使其配光性能优秀,底座和灯罩壳体注塑工艺性好,将会耗时费力,使产品开发周期增长,设计投入增大。而采用逆向设计的方法,在已有的优秀前照灯产品的基础上,进行结构性能分析,模型重构,优化设计,将会缩短产品的开发周期,并减少设计投入。
2.0T福特蒙迪欧前照灯还具备自适应特性,其灯光能根据转向盘角度等行车参数做出随动转向。与非智能型前照灯相比,AFS前照灯结构更加复杂,包括传感器组、传输通路、处理器和执行机构。由于前照灯对汽车夜间行驶有重要的安全保障,因此要求前照灯具有较高的工作可靠性。对于结构复杂的AFS前照灯而言,其结构可靠性必须进行校核。通过逆向设计得到三维实体模型后,对此模型进行静力学分析与相关强度校核,能确保AFS前照灯系统的硬件可靠性[1]。
逆向工程概述
逆向工程,又称为反求工程,其发展离不开计算机技术和测量技术的进步,现已广泛应用于多个领域,成为现代制造业不可或缺的一门技术[2]。在机械工程领域,逆向工程是为了在无三维模型和设计图纸的情况下,通过现有实物,并利用测量技术和计算机辅助设计技术,获得实物的三维模型,这种行为,在国内工业界也被称为“抄数”。但逆向工程也不全是仿造,在很多领域的运用,不仅为创新提供了思路,还为创新提供了方法。从广义上讲,逆向工程是一门涵盖多学科的综合性技术,它以产品为研究对象,运用工程学、设计方法学和计算机辅助技术,探索产品设计、制造和管理的关键技术。通过对这些核心技术的吸收学习消化,可以为设计更先进的产品提供方向。
因此,抛开逆向工程最基础的抄数定义,逆向工程更深层次的意义在于分析目标系统以识别系统组件及其关系[3]。从机械设计的角度考虑,逆向工程指启动重新设计过程,在此过程中,产品被预测、观察、分解、分析、测试并验证,并在其功能、形式、物理原理、可制造性和可组装性方面进行记录。
逆向工程发展现状
逆向工程的理论和方法可以追溯到20世纪80年代,最早在软件、硬件和生物领域占据主导地位,后来应用于不同领域,包括机械工程、土木工程、建筑、文化遗产、牙科和医学。
对于一般逆向工程而言,其可分为三个阶段,分别为数据采集,数据处理和模型重构。因此,对于一般意义上的逆向工程,其发展现状可以从这三个方面来论述。
数据的采集方法分为接触式和非接触式,这两种方法是现代精密测量的重要方法,也是逆向工程的基础。接触式测量方法属于较传统的测量方法,按照扫描方式的不同可分为连续扫描式和点位触发式。点位触发式的常用测量设备是三坐标测量机,其测量精度很高。针对于自由曲面的逆向技术,其研究的重点在于快速精确数字化未知复杂自由曲面。Qinlu Ke[4]采用多传感器法,集成使用接触式扫描探针(SP)和点激光探针(PLP),利用PLP获取的先验路径信息,应用测量路径规划算法对SP的下一扫描路径进行实时编程。计划的扫描路径随后可用于自动引导SP和坐标测量机,以实现复杂曲面的快速和精确数字化。
非接触式测量属于后来出现的测量方法,得益于光学技术的发展,基于光学的非接触式测量方法得到快速的发展,较常用的是光栅投影测量方法。使用CT扫描仪也可以实现非接触式测量,A. Gameros[5]对比了光学扫描仪和CT扫描仪对重构曲面偏差值的影响,研究发现,在自由曲面区域,光学扫描数据的最大偏差值为-70 和 70 ,而CT扫描数据的最大偏差值为-180 和 80 。对自由曲面要进行详细测量,才能获得充分的数据,以此反映实体自由曲面形状,章云云[6]采用接触式测量设备和激光扫描设备相结合的方法,并通过调整CMM姿态进行不同角度的测量,获得尽可能密集的自由曲面点云数据。前照灯内部结构复杂,零件数目较多,为了准确获取其内部结构的点云数据,钟振龙[7]采用接触式扫描测量仪,对前照灯内部结构尺寸进行测量,获得了准确可靠的内部结构点云数据,并减少了其内部部件的数据量。
数据处理是逆向工程比较关键的技术环节,对模型重构的质量有很大的影响。数据处理工作包括降噪处理、多视图点云数据拼合、点云过滤,数据精简、点云数据分割等[8]。对于数据精简,目前常采用的方法有:利用均匀网格减少数据;利用减少网格三角形以减少数据点;利用误差带减少多面体数据点。
点云分割是根据组成实物外形曲面的面片特征对点云数据进行分割,将属于同一子曲面类型的数据进行归类形成一个数据子集,为后续的曲面造型提供方便。王维[9]选择在前照灯拐角处对前照灯点云数据进行斜率分割,把点云分成三块区域,分别为前灯罩,中间框架和后灯罩,便于后续曲面重构。
曲面重构是逆向设计中的关键步骤,直接决定了三维模型质量的优劣。目前常用的方法有基于曲线的重构技术、基于曲面的重构技术和基于特征的重构技术。基于曲线的重构技术是将数据点通过插值等方法拟合成样条曲线,再生成曲面片[10]。基于曲线的重构技术是直接将数据点拟合成曲面片。基于特征的重构方法是当下的研究热点,涌现出一批新型的逆向工程理论。N. Anwer[11]采用了几何逆向设计方法,通过离散曲率统计、边界识别、顶点聚集、连接区域生成和特征识别,成功重构了带有自由曲面形状的物体。这种逆向设计方法的关键在于形状分割和特征识别。Francesco[12]采用基于模板的逆向工程方法,依赖于CAD模板执行重建过程,CAD模板的特征树和几何约束是根据物理对象的先验信息来定义的,并拟合到三维网格数据上,通过粒子群优化算法优化其尺寸参数和定位。王兴晨[13]采用逆向特征提取与参数化设计相结合的方法,以特征点数据为参数,通过样条线连接特征点,生成截面特征曲线,并使用蒙皮法完成了曲面重构。
AFS前照灯概述
汽车自适应前照灯系统(Adaptive Front-Lighting System)是一种有别于传统前照灯系统的新型汽车照明装置,已经兴起了十数年,目前已在中高端汽车上广泛配用。自适应前照灯系统能根据方向盘转角,汽车行驶车速等信息,来动态地对汽车大灯进行水平方向调节,以适应汽车当前的转向角,保持车灯灯束方向与汽车行驶方向一致,确保车灯对前方道路提供最佳照明,扩大驾驶员的视野范围,提高夜间行车的安全性[14]。自适应前照灯系统还能根据车身俯仰角对汽车大灯进行垂直方向调节。当车身质心高度和俯仰角出现变化时,对于传统前照灯而言,其灯束也会上下摆动,将加剧驾驶员的视觉疲劳。而自适应前照灯可以使车灯灯束在垂直方向保持稳定,减弱其波动,给驾驶员提供更舒适的视觉环境。
AFS前照灯发展现状
对自适应前照灯系统的官方研究源于欧盟尤立卡计划1403项目——汽车先进前照灯系统。此项目研究设计了自适应前照灯系统的功能和技术要求,并为ECE R123法规的制定提交提案。将自适应前照灯系统纳入认证范围的ECE R123法规于2007年正式发布,详细阐释和定义了AFS前照灯系统的五大照明模式,并在修订后的ECE R48法规中规定了各照明模式的开启条件和配光要求。
前照灯弯道自适应技术目前有两种方案,第一种是前照灯随动调节,第二种是矩阵式LED光束调节。前照灯随动调节通过步进电机来实现。当汽车转弯时,各类传感器收集行驶数据,并传输至处理器进行算法处理,按照既定的控制策略计算得到车灯应当旋转的角度值,以此来控制步进电机的旋转角。福特蒙迪欧的自适应前照灯系统采用的就是这种结构,执行机构与前照灯透镜相连,步进电机带动转向框架继而使透镜水平摆动,汽车在进入弯道前光束调节到合适的位置。对于矩阵式LED光束调节,其大灯是由多达数十个LED单体构成,每个单体都可以单独的进行亮度调节和开闭的控制[15]。车载CCD图像传感器采集前方弯道信息,处理器根据汽车的行驶状态和采集到的弯道信息,确定每颗LED单元的开闭和亮度,即确定矩阵式LED大灯的控制方式。汽车转角越大,LED 单体打开的位置就越靠近转向的一侧。当汽车通过弯道恢复直行后,靠近转向侧的LED单体逐一关闭,原来位置的LED单体又会重新打开。
矩阵式LED大灯除了能实现弯道光束调节,还能实现防眩目功能[16]。通过车辆检测系统,前照灯控制系统能够感知和跟踪到800 m 距离内的其他车辆。当检测到汽车正前方或者对面车道有车辆和行人时,前照灯控制系统通过跟踪算法,可以实时跟踪目标车辆,并关闭和开启相应位置的LED 单体。在整个跟踪过程中,LED矩阵的一行或者数行LED灯会像流水灯一样工作,在特定的时间关闭特定的LED单体,而其他的LED单体保持开启状态,既能避免近光灯直射对面车辆,又能保证正常的照明需求。此过程是实时的,动态的,对控制系统的算法提出了很高的要求。
AFS前照灯结构
 本论文研究的对象是福特蒙迪欧自适应前照灯,由法雷奥公司研究制造。这款前照灯的光学结构是投影式,即PES前照灯。这种光学结构的前照灯非常紧凑,便于开发自适应前照灯系统,市面上大多数采用前照灯随动调节技术的自适应前照灯系统都是采用的PES光学结构[17]。
本论文研究的对象是福特蒙迪欧自适应前照灯,由法雷奥公司研究制造。这款前照灯的光学结构是投影式,即PES前照灯。这种光学结构的前照灯非常紧凑,便于开发自适应前照灯系统,市面上大多数采用前照灯随动调节技术的自适应前照灯系统都是采用的PES光学结构[17]。
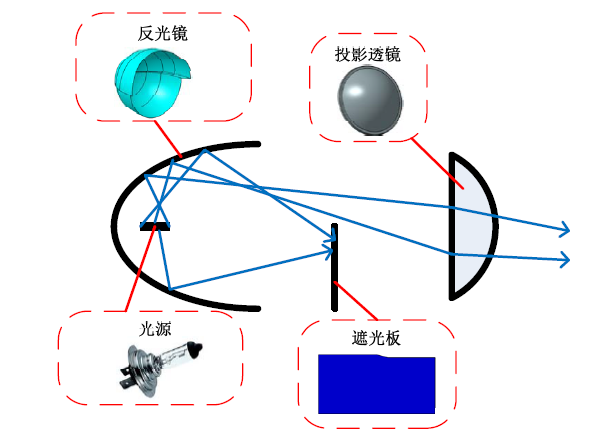
图1.1 PES前照灯系统结构示意图
PES前照灯采用成像的方式产生规定的光型,其结构由反光镜,光源,透镜和遮光板构成,如图1.1所示。PES前照灯的反光镜为椭球型,光源安装在第一焦点处,遮光板安装于第二焦点处。第一焦点处发射的光线经反射汇聚于第二焦点,遮光板挡住明暗截止线上方的光线,产生所需的光型[18]。
当PES前照灯的光源为卤素光源或HID光源时,通过转动遮光板或者上下移动遮光板,实现近远光灯调节,此时这种光源既是近光灯光源,也是远光灯光源,故而近远光灯所用的透镜相同。当PES前照灯光源为LED时,由于LED的光强分布为朗伯型,仅在半个空间内发光,若反光镜为整个椭球型,则只有一半的区域起反射作用[19]。
装配于福特蒙迪欧上的自适应前照灯巧妙的利用了LED的发光特性,将PES前照灯的反光镜分为上下两部分,分别为近光灯反光碗和远光灯反光碗,如图1.2所示。同时近光侧LED灯和远光侧LED灯也分别安装于一块铝板的上下两侧,在近光侧还安装有遮光板。这种结构等同于将远光灯与PES近光灯拼合于一体,近远光灯光源不同,但共用一个透镜,同样实现了双光透镜。
图1.2 近光和远光反光碗
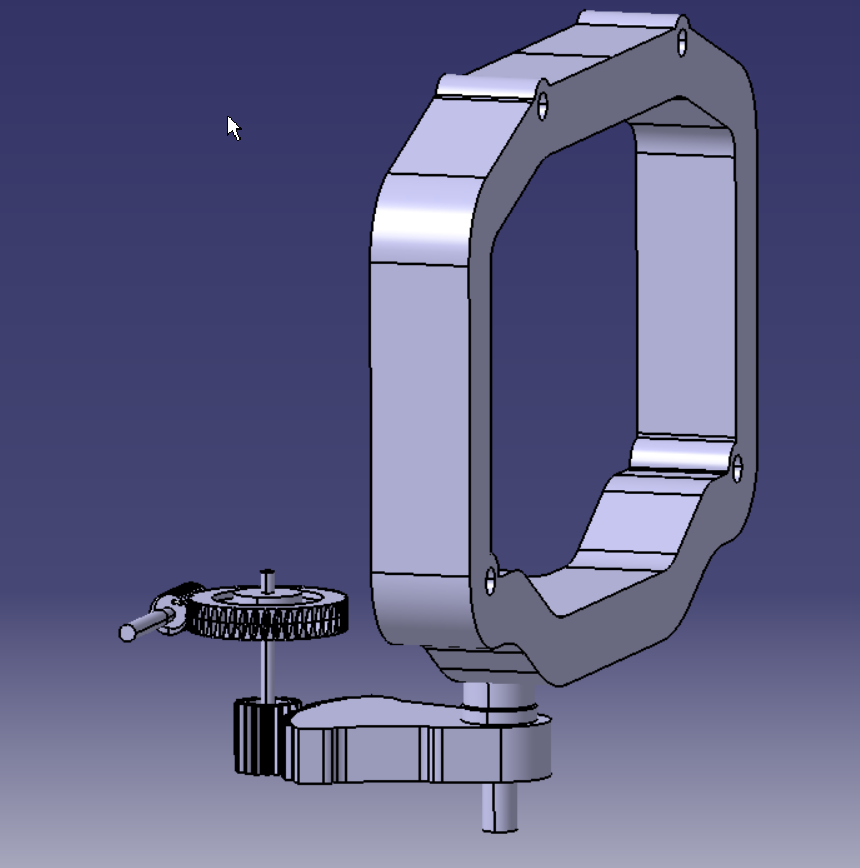
前照灯的随动调节通过执行机构来实现。法雷奥自适应前照灯的执行机构包括一个步进电机、一对蜗轮蜗杆传动副和一对齿轮传动副,如图1.3所示。此传动链的末端零件由两片扇形齿轮拼合而成,中间夹有U型金属片。扇形齿轮与转向随动支架间通过滑动接头连接,扇形齿轮转动带动随动支架作水平转动。随动支架正上方安装有枢轴,其轴线与扇形齿轮转动中心对心。
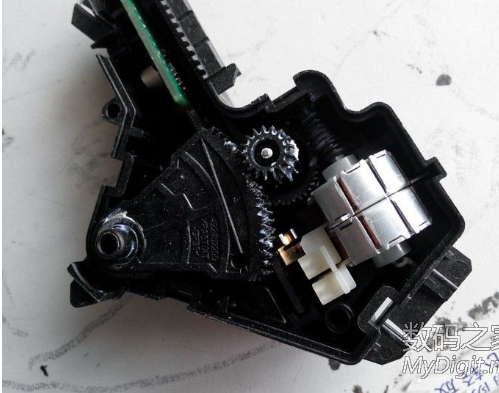 图1.3 AFS前照灯随动转向控制器
图1.3 AFS前照灯随动转向控制器
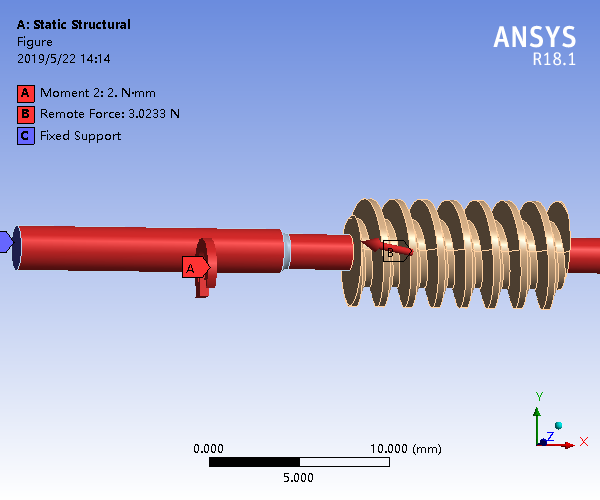
AFS前照灯仿真分析
与传统前照灯相比,自适应前照灯有多处机械联结,以实现随动转向。这些联结件必须具有足够的刚度,克服振动引起的共振,使照明模块的位置牢固稳定不松动,并且在行驶时受到冲击和振动的影响也能保证精准的光束方向。随着时间推移,随机振动会使联结件产生疲劳破坏,使前照灯转向到无效位置。
以上是毕业论文大纲或资料介绍,该课题完整毕业论文、开题报告、任务书、程序设计、图纸设计等资料请添加微信获取,微信号:bysjorg。
相关图片展示: