全轮驱动纯电动小车线控转向系统设计毕业论文
2020-04-13 11:25:07
全轮驱动纯电动小车线控转向系统设计
学院(系): 国际教育学院
专业班级: 车辆gj1402
学生姓名: 胡齐锋
指导教师: 杨波
学位论文原创性声明
本人郑重声明:所呈交的论文是本人在导师的指导下独立进行研究所取得的研究成果。除了文中特别加以标注引用的内容外,本论文不包括任何其他个人或集体已经发表或撰写的成果作品。本人完全意识到本声明的法律后果由本人承担。
作者签名:
年 月 日
学位论文版权使用授权书
本学位论文作者完全了解学校有关保障、使用学位论文的规定,同意学校保留并向有关学位论文管理部门或机构送交论文的复印件和电子版,允许论文被查阅和借阅。本人授权省级优秀学士论文评选机构将本学位论文的全部或部分内容编入有关数据进行检索,可以采用影印、缩印或扫描等复制手段保存和汇编本学位论文。
本学位论文属于1、保密囗,在 年解密后适用本授权书
2、不保密囗 。
(请在以上相应方框内打“√”)
作者签名: 年 月 日
导师签名: 年 月 日
Abstract
With the development of electronic technology and information technology, all industries began to realize intelligence. The wave of science and technology reached into the automotive industry, pure electric vehicles of new energy and smart vehicles based on Internet of Vehicles have become the two main development parts. Steer-by-wire (SBW) technology is the key technology for the development of pure electric vehicles and smart vehicles. Not only can it improve the handling stability of vehicles, but it can also be integrated and controlled with other control systems in vehicles to make vehicles more intelligent.
This article focuses on the design of the steer-by-wire system. In traditional manned driving, SBW consider designing a reasonable variable transmission ratio which can reduce the burden on the driver and improve the steering stability of vehicles. The design of the rack and pinion gears, the calibration of the steering gear shafts, and the optimal design of the steering gears are emphasized. The main methods and theories are designed using the empirical parameters of the vehicle design and the course content of the mechanical design learned by the university. the results meet the requirements of strength, safety and reliability.
Key Words:Steer-by-wire system; rack and pinion steering gear design; design of steering trapezoid;
Contents
Chapter 1 Introduction 1
1.1 Background and Purpose of Research 1
1.1.1 Research Background 1
1.1.2 Research Purpose and Significance 2
1.2 Current Developing Status of Steer-by-wire System 3
1.3 The Research Content of This Topic 5
Chapter 2 Layout of the SBW System 7
2.1 Structure and Working Principle of the SBW System 7
2.1.1 Structure of the SBW System 7
2.1.2 Working Principle of the SBW System 8
2.2 Differences and Relations between the Structure of the SBW System and EPS System 9
Chapter 3 Overall Design of the SBW System 12
3.1 Scheme Selection of the SBW system 12
3.2 Classification of the Rack and Pinion Steering Gear 13
3.3 Sensors and Motors 14
3.4 Steering Wheel and Steering Shafts 15
3.5 Arms and Ball Studs for the Steering Gears 16
3.6 Steering Tie Rods and their Ends 16
Chapter 4 Detailed Design of the SBW system 17
4.1 Cornering Angles’ Calculation of the Steering Wheels 17
4.2 Load Calculation 18
4.3 Design of Rack and Pinion Steering Gear 19
4.3.1 Checking the pinion contact fatigue strength 21
4.3.2 Checking the pinion bending fatigue strength 21
4.4 Angle Ratio and Force Ratio of the Steering System 21
Chapter 5 the Design of the Steering Trapezoid 23
Chapter 6 Conclusion 25
References 26
Thanks 27
Chapter 1 Introduction
1.1 Background and Purpose of Research
1.1.1 Research Background
The wire control technology was successfully applied in the aviation field. Due to the adoption of an electronically controlled system, its control is flexible and the control strategy is easy to be implemented, enabling the aircraft to have a good operating performance. In order to improve the operating performance of automobiles, many well-known automobile manufacturers in foreign countries are now trying to apply the wire control technology to automobile steering systems and have developed concept vehicles with steer-by-wire systems[1]. However, due to the existing European regulations, vehicles of steer-by-wire systems without mechanical connection are not allowed to be used on public transportation roads.
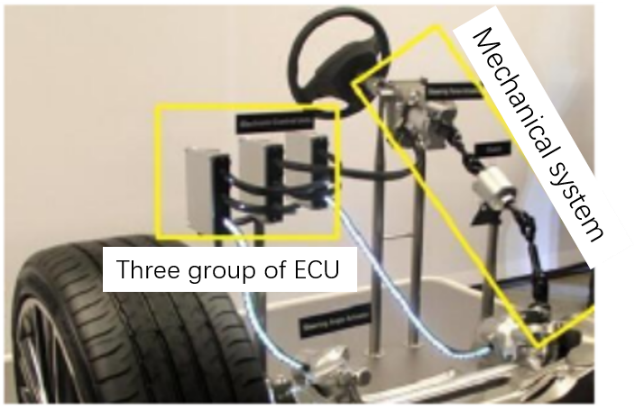
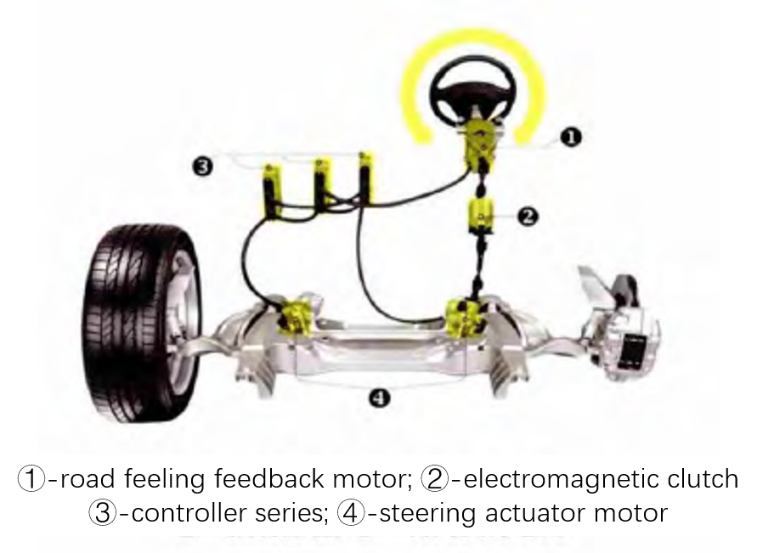
 Figure 1.1 the Steer-by-wire System
Figure 1.1 the Steer-by-wire System
Therefore, purely electronically-controlled steer-by-wire systems are still in the developing stage and concept vehicle stage. The steer-by-wire system can be said to be a technological innovation for the development of the automotive industry. In today's environment, two major energy challenges lie ahead of the world. In the future, the main body of the automobile is the electric vehicle, the assisted driving system and the unmanned intelligent driving system are promising new research fields, while the research of the steer-by-wire system is the basic and effective way to realize to smart driving for cars[2]. However, compared with the traditional mechanical steering system, the mechanical components used in the steer-by-wire system to connect the steering wheel and the road steering wheel are replaced by the bus technology. Therefore, the most difficult problem which needs to be solved in the developing process of the steer-by-wire system is the vehicles’ operating reliability issue.
At present, the development of the steer-by-wire system in China cannot compare with foreign countries. It mainly refers to and absorbs research results from abroad, and there is still a big gap with the advanced level in foreign countries[3]. Therefore, starting from the existing conditions, relying on the existing platform of the all-wheel-drive electric vehicle, the requirements for the complete and in-depth structural design and control strategy of the steer-by-wire steering system will be provided, which will provide reference and accordance for the future market-oriented targets of the domestic steer-by-wire system.
1.1.2 Research Purpose and Significance
Firstly, this is an inevitable need to improve the handling stability of vehicles. Studies have shown that the changeable transmission ratio (refers to the steering system transmission ratio changes with the vehicle speed and steering wheel angle, rather than only changes with the steering wheel angle in the traditional sense) of the steering system can improve the car's handling performance, but ordinary electric steering is difficult to meet this requirement due to the existence of mechanical connections, while some variable transmission ratio mechanisms have problems such as complicated structure, high manufacturing cost, large space occupation, and affecting road feeling during active control, which often results in less “road feeling” information obtained by the driver[4]. However, moderate sense of road feeling is very important for high-speed vehicles.
以上是毕业论文大纲或资料介绍,该课题完整毕业论文、开题报告、任务书、程序设计、图纸设计等资料请添加微信获取,微信号:bysjorg。
相关图片展示: