基于双目视觉的无人驾驶控制系统研究毕业论文
2020-04-12 09:02:01
摘 要
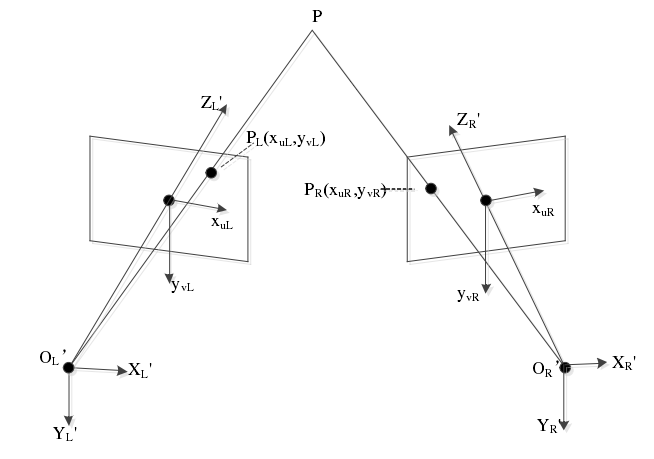
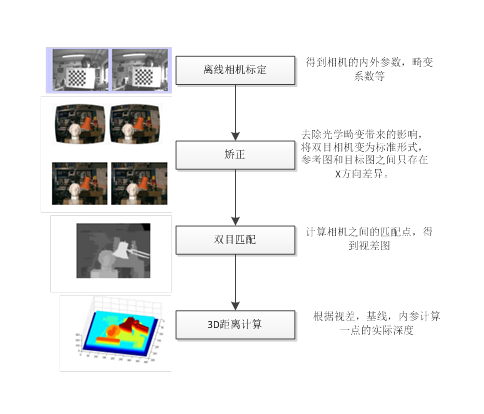
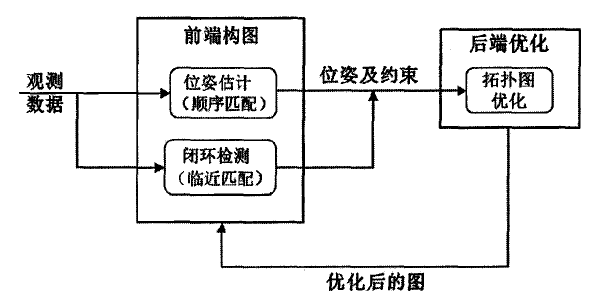
本文论述的主要内容是:设计一个可行的基于双目视觉技术的无人驾驶控制系统来实现对无人车的自主控制。本文首先介绍了无人驾驶汽车以及这套系统中用到的核心技术在国内外的发展现状,接着从双目视觉系统引入,介绍了双目视觉的基本成像原理以及如何利用双目视觉系统经过一系列过程得到视差图,同时还介绍了在本系统中十分重要的三个坐标系。在得到关键的视差图后,介绍了利用三个重要的坐标系计算无人车位姿变化的方法,并采用了基于图的方法对无人车周围环境进行地图重建,接着通过BoW方法进行闭环检测和基于迭代线性化的误差最小化算法对地图进行后端优化消除误差,来对无人车周围环境进行三维重建并进行储存,提供后续路径规划必须的符合要求的电子地图。紧接着就是本文最为核心的内容——路径规划技术,本文首先分析了常见的几种经典算法的优缺点,最终采用了先用A*算法进行全局路径规划再用DMA算法进行局部路径规划的方法,实现了最优路径的规划并且能够及时根据周围环境变化进行实时规划,并利用MATLAB对算法进行了仿真。同时,为了实现在动态环境下进行准确的路径规划,本文还引入了基于驾驶行为意图的轨迹预测技术,利用高斯混合模型对驾驶行为意图进行检测判断,并根据判断结果预测出在一定时间内该车辆可能的路径,最后采用相应的避撞策略进行更加安全可靠的路径规划。在完成路径规划后,为了使无人车能够实时准确的按照规划路径行驶,本文对目前比较常用的路径跟踪算法做了一定研究,结合各种算法的特性以及本系统的要求,采用了pure pursuit路径跟踪算法实现对无人车的横纵向控制,并在目标点的确定方法上进行了改进,改进后的算法消除路径跟踪误差的效率得到了显著提升,最终输出了底层控制所需的前轮偏角和纵向速度参数。
本篇论文主要从双目视觉系统得到的视差图出发,设计了一整套切实可行的上层控制系统,并提出了A*算法与DMA算法相结合的路径规划方法,以及一种基于pure pursuit算法改进的路径跟踪方法,对无人驾驶控制系统的研究具有重要价值。
关键词:无人驾驶;双目视觉;即时定位;路径规划;路径跟踪
Abstract
The main content of this paper is: Design a feasible drone control system based on binocular vision technology to realize autonomous control of unmanned vehicles. This article first introduced the development status of driverless cars and the core technologies used in this system at home and abroad. Then it introduced the binocular vision system and introduced the basic imaging principles of binocular vision and how to use binocular vision systems to pass through. The parallax map was obtained through a series of processes, and three coordinate systems that are very important in this system were also introduced. After obtaining the key disparity map, the method of calculating the position and posture changes of the unmanned vehicle using three important coordinate systems was introduced. The map-based method was used to reconstruct the surroundings of the unmanned vehicle, and then the closed-loop detection was performed by the BoW method. The iterative linearization-based error minimization algorithm performs back-end optimization of the map to eliminate errors, to perform three-dimensional reconstruction of the ambient environment of the unmanned vehicle and to store it, and to provide an electronic map that meets the requirements for subsequent path planning. Followed by the core content of this article, path planning technology, this paper first analyzes the advantages and disadvantages of several common classical algorithms, and finally adopts the method of using A* algorithm for global path planning and DMA algorithm for local path planning. The realization of the optimal path planning and timely real-time planning based on changes in the surrounding environment, and using MATLAB to simulate the algorithm. At the same time, in order to achieve accurate path planning in a dynamic environment, this paper also introduced trajectory prediction technology based on the intention of driving behavior, using the Gaussian mixture model to detect and determine the driving behavior intention, and according to the judgment results predict that in a certain period of time The possible path of the vehicle, and finally using a corresponding collision avoidance strategy for more secure and reliable path planning. After completing the path planning, in order to enable the unmanned vehicle to travel in real time and accurately according to the planned path, this paper has done a certain research on the more commonly used path tracking algorithms. Combining the characteristics of various algorithms and the requirements of the system, adopting pure pursuit. The path tracking algorithm realizes horizontal and vertical control of the unmanned vehicle and improves the method of determining the target point. The improved algorithm has significantly improved the efficiency of eliminating path tracking error, and finally outputs the front wheel required for the bottom control. Declination and longitudinal speed parameters.
This dissertation starts with the disparity map obtained from the binocular vision system and designs a set of feasible upper-level control systems. It also proposes a path planning method combining A* algorithm and DMA algorithm, and an improvement based on the pure pursuit algorithm. The path tracking method is of great value to the research of unmanned control systems.
Key Words:self-driving automobile;binocular vision;real-time positioning;path planning;;path tracking
目 录
摘 要 I
Abstract II
第1章 绪论 1
1.1引言 1
1.2无人驾驶在国内外的研究现状 1
1.2.1国外无人驾驶汽车发展现状 1
以上是毕业论文大纲或资料介绍,该课题完整毕业论文、开题报告、任务书、程序设计、图纸设计等资料请添加微信获取,微信号:bysjorg。
相关图片展示: