电动无人巴士转向系统设计毕业论文
2020-04-11 17:50:36
摘 要
本次毕业设计课题的题目是电动无人驾驶巴士转向系统的设计。随着时代的发展,当下越来越多的汽车公司开始研究无人驾驶汽车,无人驾驶汽车的发展要求其相应个各个系统的结构原理有巨大的改变,本此课题研究一种无人驾驶巴士的转向系统,能够在无人驾驶的条件下实现转向功能。
首先,本文对电动无人驾驶巴士特点的进行了讨论,在详细了解了现今无人驾驶转向系统的发展现状,并针对当下已有转向系统进行分析之后,设计了一个适用于无人驾驶电动巴士的转向系统。本文以无人驾驶的特点及要求为设计的根据,并对现今各种转向系统的特点进行了比较,通过初步的计算发现传统的助力电机额定转矩较小,若只应用电机转向则尺寸过大,故设计一种新型的转向系统结构,其中由转向电机替代人力输出,并用一套电控液压助力系统进行助力,设计内容包括转向系统方案的确定、齿轮齿条参数计算校核,电动机选择与布置形式,蜗轮蜗杆减速机构的设计,液压动力缸的选择与参数设计等内容,并详细探讨了此方案解决转向轻和灵的问题的方法,最后用Catia建模软件对所设计的转向系统建立三维模型。
关键词:转向系统,电动无人巴士,齿轮齿条,EHPS
Abstract
The subject of this graduation project is a design of the unmanned electric steering system. Time goes by, more and more auto companies are now researching driverless cars. The development of driverless cars requires a huge change in the structural principles of each of their respective systems. This topic focuses on a driverless vehicle. The steering system of the bus can realize the steering function under unmanned conditions.
First of all, this article discusses the characteristics of electric driverless buses, learns in detail the current development status of today's unmanned steering systems, and designs a suitable electric driverless bus for the analysis of existing steering systems. This paper takes the characteristics and requirements of unmanned vehicles as the basis for the design, and compares the features of today's various steering systems. Through preliminary calculations, it is found that the traditional rated torque of the assisting motor is small, and if only the motor steering is used, the dimensions are too large. Therefore, a new type of steering system structure is designed in which a steering motor is used in place of the human output and an electronically controlled hydraulic assist system is used to assist. The design includes the determination of the steering system scheme, the calculation of gear rack parameters, and the selection of electric motors. The arrangement, the design of the worm and worm gear deceleration mechanism, the selection and parameter design of the hydraulic cylinder, and the methods to solve the problem of steering light and spirit were discussed in details. Finally, a steering system model is accomplished by CATIA to demonstrate the design more clearly.
Keywords:Steering systems,Electric Unmanned Bus,rack and pinion,EHPS
目录
第1章 绪论 1
1.1 课题研究的目的及意义 1
1.1.1 研究目的 1
1.1.2 研究意义 1
1.2 电动无人巴士的研究现状 2
1.2.1 无人巴士国外现状 2
1.2.2 无人巴士国内现状 3
1.3 无人驾驶转向系统的研究现状 4
1.4 本章小结 6
第2章 电动无人巴士转向系统方案设计 7
2.1 电动无人巴士转向系统要求 7
2.2 电动无人巴士电动液压转向系统方案 7
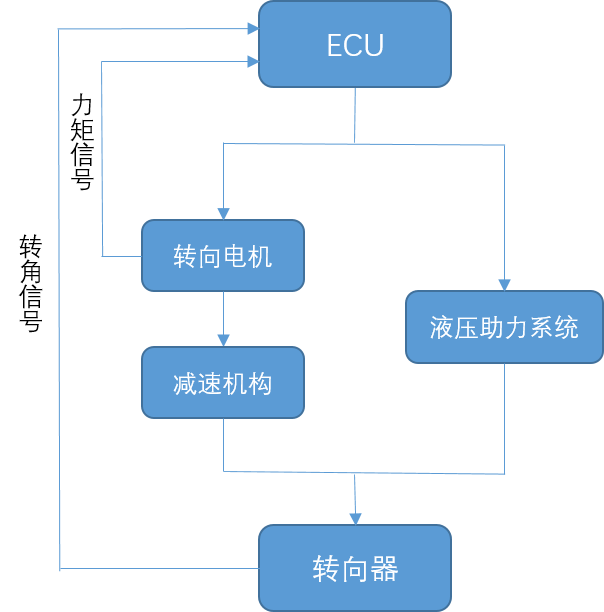
2.2.1 工作原理 7
2.2.2 电动无人巴士电动液压转向系统方案分析 8
2.3 本章小结 9
第3章 电动无人巴士电动转向器设计 10
3.1 转向器的选择 10
3.2 转向电机的选择 11
3.2.1 原地转向阻力矩 11
3.2.2 电机型号选择 12
3.3 电机减速机构的设计 13
3.3.1 减速机构选择 13
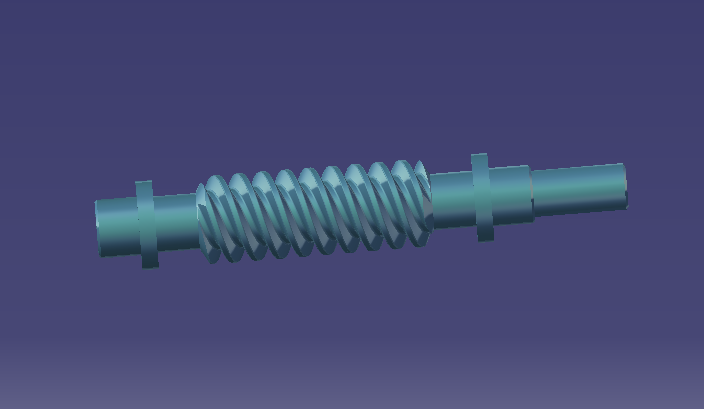
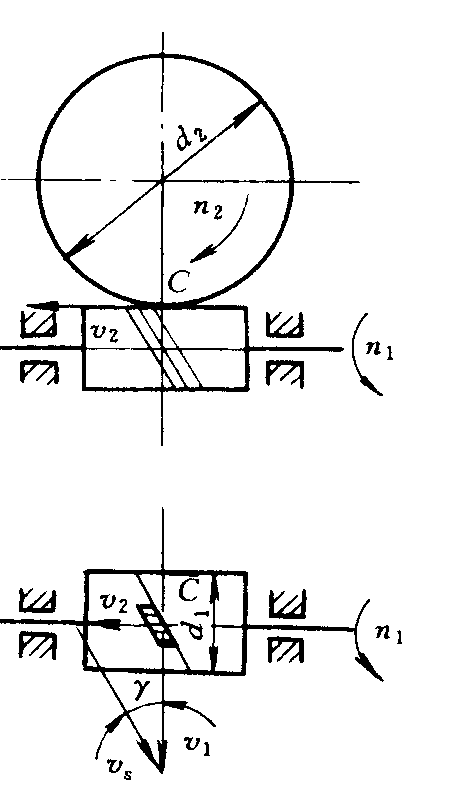
3.3.2 蜗轮蜗杆传动设计 13
3.3.3 强度校核 15
3.3.4 蜗轮蜗杆装配图 17
3.4 齿轮齿条的设计 17
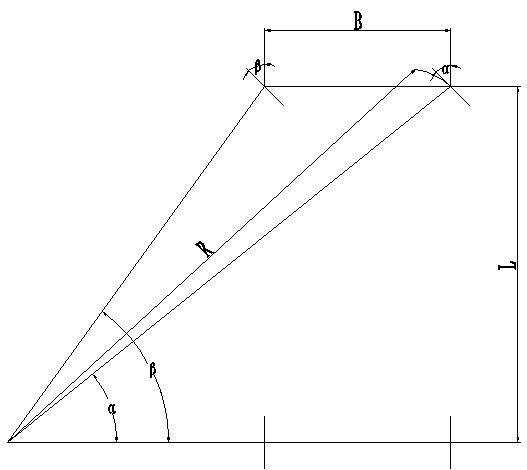
3.4.1 转向轮侧偏角计算 17
3.4.2 齿轮齿条啮合传动的特点 18
3.4.3 齿轮参数的选择 18
3.4.4 接触疲劳许用应力 19
3.4.5 确定齿轮主要参数和几何尺寸 20
3.4.6 确定齿条主要参数和几何尺寸 22
3.4.7 齿面接触疲劳强度校核 22
3.5 本章小结 23
第4章 电动无人巴士液压助力系统的选择与设计 24
4.1 电控液压助力系统原理与特点 24
4.2 电控液压助力系统原理 24
1.1.1 电控液压助力系统特点 25
4.3 电控液压助力系统的设计 25
4.3.1 动力缸的类型 25
4.3.2 液压动力缸的主要零件的结构和材料 25
4.3.3 液压动力缸的设计计算 25
4.4 本章小结 27
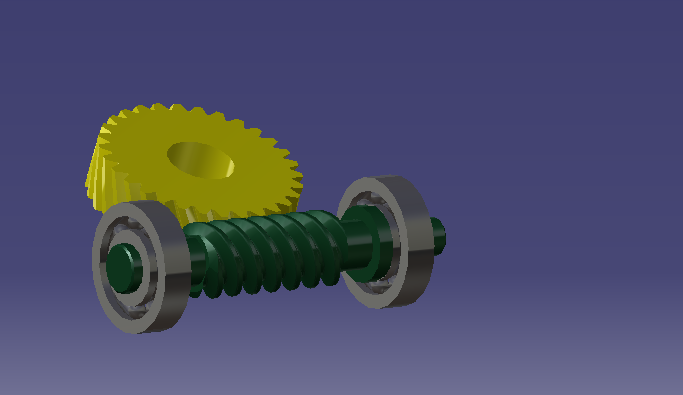
第5章 电动无人巴士转向系统的三维模型 28
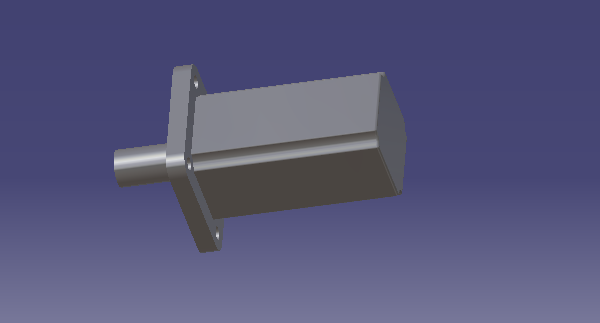
5.1 电动无人巴士转向系统模型绘制 28
5.2 本章小结 29
第6章 总结 30
参考文献 31
附录 33
致谢 35
绪论
课题研究的目的及意义
研究目的
本次选题是设计电动无人巴士的转向系统,电动无人巴士是以电力驱动并配以无人驾驶技术的载人巴士,其转向系统需要完成的任务是接收ECU下发的转向指令,完成转向操作,并在此基础上保证巴士转向时的通过性、灵活性及平稳性。
研究意义
转向系统是一辆汽车驾驶过程中关乎安全的重要的一个系统。它的作用是帮助驾驶员在驾驶汽车时能够按照自己的意图随心所欲的的改变汽车的前进或者倒退方向,并且还要求其有一定的强度刚度,能够经受住地面冲击并与行驶系统相配合使汽车的行驶方向稳定。
随着科技的进步与技术的发展,近年来,无人驾驶技术成为了车辆研究的重点及未来的发展方向。无人驾驶巴士,顾名思义,就是没有驾驶员的巴士,它运用了无人驾驶技术,通过中央处理器来代替传统车辆司机的工作,一个ECU接受安装在车辆各处的传感器的感知信号,这些信号包括了周围的环境,道路的情况,车辆的位置等信息,并根据算法输出控制信号给车辆上的各系统,从而保证汽车的正常安全的行驶。要实现无人驾驶,需要集自动控制、人工智能、图像识别等众多新兴技术,所以无人驾驶技术的发展成都体现了一个国家工业水平的高低,也是未来车辆领域的一大热点和重点。目前,百度、谷歌、苹果等公司均已开展无人驾驶汽车的研究,并已取得了初步的成果。
随着无人驾驶技术的发展,传统汽车的结构将发生巨大的变化。其中,转向系统是决定汽车主动安全性的关键总成,被称为汽车的安保件。特别是在车辆高速化、自动化、车流密集化的今天,转向系统的发展在车辆行驶的安全性、稳定性和舒适性等方面存在着不容忽视的重要性。现在的转向系统按照其原理和结构能够分为这两大类—机械转向系统与动力转向系统。其中机械转向系统是指整个系统都是机械结构,并且驾驶员给方向盘的转矩是唯一的转向力;动力转向系统是只除了驾驶员的体力之外,还有其他能源帮助转向操作。但无人驾驶技术高度发展之后,这两种转向系统都将不再适用,转向系统将向着完全的电力化发展。对无人驾驶汽车转向系统的研究与设计,是无人驾驶技术中及其关键的一环,由于无人驾驶汽车不再需要驾驶员,传统转向系统的结构也将进行新一轮的更新,未来的无人驾驶汽车转向系统将会向着轻便化、去机械化、电控化的方向发展,它将与电控系统、制动系统等一起,确保无人驾驶汽车的安全。
电动无人巴士的研究现状
无人驾驶巴士顾名思义,是指能够在没有驾驶员的情况下,能够自动驾驶的巴士,是经电动巴士改造而成的,无人驾驶巴士将无人驾驶技术应用到载人巴士上,是载人巴士能够更加有效,智能的运转。现在国内外均在研究这一新式车辆。
无人巴士国外现状
汽车工业上。美国和德国是处于领先地位的,五十年钱就开始研究无人驾驶了,而到了今天,在无人驾驶研究领先的国外有谷歌和特斯拉,对于无人巴士的研究,世界范围内EasyMile 研制的无人驾驶小巴 WEpod,Navya 研制的无人驾驶小巴 Arma等电动巴士处于领先地位。

图1.1 EasyMile 研制的无人驾驶小巴 WEpod

图1.2 Navya 研制的无人驾驶小巴 Arma

图1.3 EasyMile的EZ10

图1.4 AuroRobotic的无人驾驶接驳车

图1.5 LocalMotor的Olli
无人巴士国内现状
目前无人驾驶巴士领域国内也有很多客车公司在进行研究,包括长安、宇通、厦门金龙旅行车等汽车公司都取得了不错的成果。其中长安客车公司在2016年四月份完成了2000千米的无人驾驶巴士上路测试,已经有三级无人驾驶级别;宇通客车公司国内发展最好的客车公司,也在无人驾驶巴士研究上取得了不错的成绩,其在2015年八月进行了一次无人驾驶巴士的实验,行驶了33km,时速达到了68km,并在无人干预的情况下顺利完成全程。

图1.6 宇通智能驾驶电动客车

图1.7 金旅无人驾驶微循环巴士
无人驾驶转向系统的研究现状
转向系统从汽车出现之后开始随着汽车发展,其中经历了一个多世纪,历经了以下四个阶段。
- 机械转向系统(MS)
整个系统从方向盘到车轮之间的连接都是机械结构,并且驾驶员给方向盘的转矩是唯一的转向力,通过其中的机械连接,将其放大,但这类转向系统有方向盘沉重,打手等各种缺点。所以用的越来越少了,现在已经逐渐被抛弃。
(2)液压助力转向系统(HPS)
液压助力转向系统是一种动力转向系统,所以不使用驾驶员的力量为唯一的转向能源,还用发动机的动力进行转向助力,从批量装配到现在已经有了半个多世纪的历史,由于其具备 技术成熟、成本低廉、可靠性高、操控精准、转向力足够等优点,现今早已经应用于乘用车和商用车上,在重型车辆上使用的最为广泛。
(3)电液助力转向系统(EHPS)
在HPS系统的机械结构上增加了一套电控系统,并且转向助力泵是由电机驱动,电机这是又电子控制单元控制。
其主要特征转向油泵由电动机驱动,并加装电控系统,使得转向辅助力的大小不仅与转向角度有关,还与车速相关。EHPS作为HPS的改进系统,一是可以完全保证传统的液压助力转向系统的所有优点,并且克服了其结构复杂、部件较多、质量重、难以进行方便的模块化设计的缺点,并且不需要大量改动整个转向系统布置;二是通过无刷直流电机及其控制单元来驱动油泵实现助力转向,在无需助力转向情况下,控制器将电机控制到最低能耗的转速,从而节省了发动机燃料的消耗,降低废气排放;三是EHPS结合不同的车型、车速、转角等提供不同助力,舒适和稳定性较好。
(4)电动助力转向系统(EPS)
以上是毕业论文大纲或资料介绍,该课题完整毕业论文、开题报告、任务书、程序设计、图纸设计等资料请添加微信获取,微信号:bysjorg。
相关图片展示: