基于CNN激光雷达数据训练的动态数据产生机制研究毕业论文
2020-03-10 19:33:30
摘 要
本文对激光雷达点云目标识别算法进行了总结,并比较了基于人工特征结合分类器的传统算法与基于卷积神经网络的算法。从普通的人工神经网络开始介绍,进而扩展到卷积神经网络的基本原理和结构,重点对卷积神经网络的训练方法和技巧进行了研究总结,最后搭建了一个卷积神经网络进行手写数字识别,对卷积神经网络的训练和优化方法进行了实验。
论文主要研究了激光雷达点云的目标识别算法,卷积神经网络的工作原理,以及卷积神经网络的训练方法与技巧。
研究结果表明:使用卷积神经网络的方法进行点云目标识别,显著优于未使用卷积神经网络的传统方法;在对卷积神经网络进行训练时,选择合适的训练方法,可以显著提高模型的训练速度与准确率。
关键词:激光雷达;点云;目标识别;卷积神经网络;训练方法;
Abstract
This paper summarizes the laser radar point cloud target recognition algorithm, and compares the traditional algorithm based on artificial features combined with classifiers and the algorithm based on convolutional neural network. From the general artificial neural network introduction, and then extended to the basic principles and structure of the convolutional neural network, focusing on the convolutional neural network training methods and techniques. Finally a convolutional neural network for handwritten digital recognition was conducted on the training and optimization methods of convolutional neural networks.
The dissertation mainly studies the algorithms of target recognition using lidar point cloud, and the training method of convolutional neural network.
The results show that the use of convolutional neural network method for point cloud target recognition is significantly better than the traditional method without convolutional neural network; when training convolutional neural network, select the appropriate training method can significantly improve the training Effects and training speed.
Key Words:Lidar; point cloud; target recognition; convolutional neural network; training method;
目 录
第1章 绪论 1
1.1 研究背景及意义 1
1.2 基于激光雷达的目标识别 1
1.3 卷积神经网络的发展 2
1.4 主要研究内容与框架 3
第2章 基于激光雷达点云的目标识别算法 5
2.1 车用激光雷达简介 5
2.2 基于传统机器学习的算法 6
2.2.1 点云栅格化 6
2.2.2 点云分割与滤波 6
2.2.3 点云聚类与障碍物轮廓提取 7
2.2.4 目标分类 7
2.3 基于卷积神经网络的算法研究概述 8
2.4 本章小结 8
第3章 人工神经网络结构与算法 9
3.1 模型概述 9
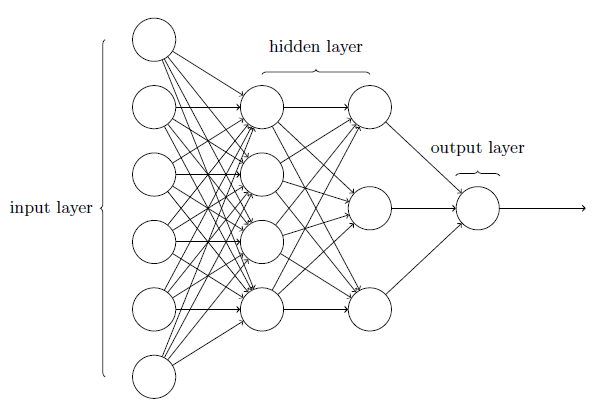
3.1.1 模型结构 9
3.1.2 模型应用 10
3.2 模型算法 10
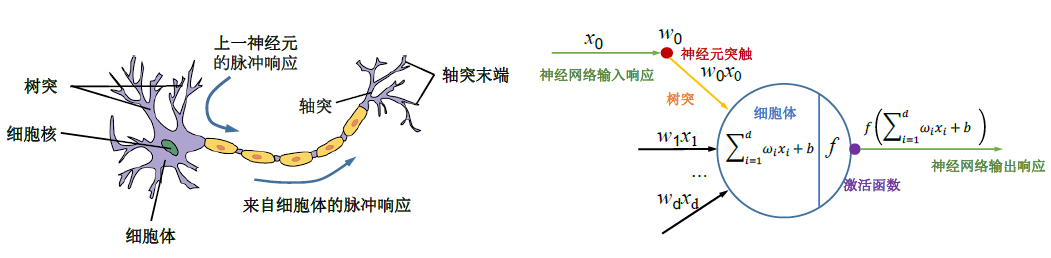
3.2.1 神经元模型 10
3.2.2 前向传播 11
3.2.3 反向传播 11
3.3 模型设计 12
3.3.1 激活函数 12
3.3.2 损失函数 16
3.4 本章小结 17
第4章 卷积神经网络的结构与算法 18
4.1 模型结构 18
4.1.1 卷积层 19
4.1.2 池化层 22
4.1.3 全连接层 23
4.2 模型算法 24
4.2.1 前向传播 24
4.2.2 反向传播 25
4.3 经典模型 27
4.3.1 Alex-Net网络模型 27
4.3.2 VGG-Nets网络模型 28
4.3.3 NIN网络模型 29
4.3.4 Res-Net网络模型 29
4.4 本章小结 30
第5章 神经网络训练技巧与优化算法 31
5.1 训练概述 31
5.1.1 数据集划分 31
5.1.2 欠拟合与过拟合 32
5.2 训练技巧 33
5.2.1 超参数设定 33
5.2.2 网络参数初始化 34
5.2.3 网络正则化 35
5.2.4 数据预处理 35
5.2.5 批规范化 36
5.3 优化算法 36
5.3.1 BGD算法 37
5.3.2 Momentum算法 37
5.3.3 RMSprop算法 37
5.3.4 Adam算法 38
5.4 开源框架比较 38
5.4.1 Caffe 38
5.4.2 TensorFlow 39
5.4.3 Deeplearning4j 39
5.4.4 Theano 39
5.4.5 PyTorch 39
5.4.6 Keras 40
5.4.7 对比 40
5.5 本章小结 41
第6章 基于手写数字识别的实验 42
6.1 MINIST数据集 42
6.2 数据预处理 42
6.3 卷积神经网络实现与优化 43
6.3.1 原始网络模型 43
6.3.2 Dropout优化 43
6.4 实验结果分析 44
6.5 本章小结 44
第7章 总结与展望 45
7.1 总结 45
7.2 展望 45
参考文献 46
附录A 原始卷积神经网络 48
附录B 优化卷积神经网络 50
致 谢 52
第1章 绪论
本章首先阐述了无人驾驶智能车环境识别的背景和意义,然后阐述了激光雷达在目标识别方面的研究进展,接着对卷积神经网络的发展进行了介绍,最后是论文主要研究内容和框架。
1.1 研究背景及意义
无人驾驶汽车在增强道路安全、缓解道路拥堵、减小空气污染等领域带来的颠覆性改善,使其越来越受到国家和公司的重视。无人车在道路安全有着重大意义,在中国,有将近60%的交通事故与汽车与行人或者电动自行车相撞相关;在美国的机动车事故中,有94%与人为失误有关,而无人驾驶技术凭借其强大的环境感知能力以及低失误率,能够有效提高道路安全。无人驾驶汽车能够缓解道路拥堵,无人驾驶汽车如果能够较大比例地使用,无人驾驶汽车上的传感器就能够与智能化后的交通系统联合工作,一方面可以优化交叉口的车流量,另一方面红绿灯的间隔可以设置成动态的,车流量多时时间长,车流量少时时间短,从而提高车辆的通行效率,缓解拥堵。无人驾驶汽车在减小空气污染也有重要作用,无人驾驶汽车通过优化控制,可以精准地控制加速和减速,比手动驾驶的汽车有更高的燃油经济性,在节约燃料的同时,也减少了污染物的排放。
无人驾驶汽车的主要技术难点有环境感知、行为决策、运动控制三方面[1],其中环境感知是最基础的部分,没有对车辆周围三维环境的定量感知,无人驾驶系统的决策与控制系统便无法工作。目前用于无人驾驶汽车上的传感器主要有摄像头、毫米波雷达与激光雷达。摄像头成本低廉,但是受光线影响较大,单一摄像头获得的2D图像无法得到准确的距离信息[2],多摄像头生成深度图的方法又需要很大的计算量[3],不能很好满足实时性要求,摄像头广泛应用于交通标志、交通灯、车道线识别、驾驶员状态监测。毫米波雷达使用的是30-300GHz频段的毫米波,毫米波穿透雾、烟、灰尘的能力强,可以在任何时间与任何天气使用,体积小,成本低,技术成熟,广泛应用于探测障碍物、获取距离信息,测速。激光雷达在测量精度上比毫米波雷达表现更出色,不仅可以进行障碍物探测、获取深度信息,还可以进行车辆、行人等障碍物识别,与摄像头相比,激光雷达可以直接获得准确的距离信息,但是却丢失了语义信息,同时激光雷达成本十分昂贵,且易受空气中悬浮物的干扰。可以看到基于激光雷达或者将摄像头与激光雷达信息融合进行环境识别的研究越来越受到重视。
1.2 基于激光雷达的目标识别
无人驾驶汽车首要解决的问题就是对环境的感知能力,无人驾驶汽车需要解决一系列复杂的环境感知问题,比如交通标志与交通信号灯的识别,道路检测和跟踪,障碍物检测,动态障碍物跟踪预测等等。激光雷达由于其可以准确地获得距离信息,在无人驾驶环境感知任务中的主要负责障碍检测和跟踪、目标识别、SLAM建图、道边检测等等。其中,利用激光雷达点云信息进行车辆、行人等目标的识别,是识别重点,同时也是后续跟踪的基础。
基于激光雷达的目标识别,传统的方法主要有基于模板匹配的方法,以及基于特征描述的方法,基于模板匹配的方法一般用来研究目标比较固定的模型,通过计算目标物体和标准模板之间的相似程度来判断是否为目标对象,而基于特征描述的方法,是通过提取障碍物的有效特征对目标物体进行识别。基于模板匹配的方法简单、实时性好,但视角差异、目标变形、目标部分遮挡等原因使算法鲁棒性不高,抗干扰能力差,因此现在基于特征描述的方法被较多研究。多线激光雷达可以获取大量障碍物的三维信息,因此基于激光雷达点云的特征提取,多是基于点云分布、几何形状和强度分布特征。在基于特征的分类中,多采用机器学习的方法,用人工标记好的样本训练特定的分类器,进而使用分类器进行分类。
随着2012年卷积神经网络在图像识别领域名声大噪,很快卷积神经网络也席卷了激光雷达目标识别领域,目前KITTI数据集3D识别前几名均采用了卷积神经网络。卷积神经网络直接将原始点云数据输入,给出预测对象以及位置,不需要人为地提取特征,将特征提取与分类器联合优化,在识别效果上大大领先了未使用传统神经网络的传统算法。由于点云数据与图像数据有很大的区别,因此基于卷积神经网络的3D点云识别,主要有三种方法。百度公司将点云投影到某个视图后,再利用图像识别的算法进行识别[4];苹果公司将三维点云划分成一个个体素网格,将每个体素内的点变换为表征形状信息的矢量表示,通过卷积中间层聚合网络,再使用RPN生成3D检测[5];PointNet直接将点云中每个点的三维坐标作为初始通道,通过卷积池化操作提取点云分布特征,进而实现对目标的分类[6]。
1.3 卷积神经网络的发展
卷积神经网络发展历史中的第一件里程碑事件发生在上世纪60年代左右的神经科学中,加拿大神经科学家David H. Hubel和Torsten Wiesel于1959年提出猫的初级视皮层中单个神经元的“感受野”概念,紧接着于1962年发现了猫的视觉中枢里存在感受野、双目视觉和其他功能结构,标志着神经网络结构首次在大脑视觉系统中被发现。
1980年前后,日本科学家福岛邦彦在Hubel和Wiesel工作的基础上,模拟生物视觉系统并提出了一种层级化的多层人工神经网络,即“神经认知”,以处理手写字符识别和其他模式识别任务。神经认知模型在后来也被认为是现今卷积神经网络的前身。在福岛邦彦的神经认知模型中,两种最重要的组成单元是“S型细胞”和“C型细胞”,两类细胞交替堆叠在一起构成了神经认知网络。其中,S型细胞用于抽取局部特征,C型细胞则用于抽象和容错,不难发现这与现今卷积神经网络中的卷积层和汇合层可一一对应。
CNN最先由LeCun在1998年使用LeNet网络成功应用到手写数字的识别任务上[7];2012年的ImageNet比赛中Hinton用改进的更为深层的AlexNet网络[8],将分类错误率从非深度学习算法的28.2%降到了16.4%,卷积神经网络引起非常大的关注;2014年,继续加深层数的VGG网络[9],将错误率降到了7.3%;2015年每层多卷积核并行的GoogLeNet网络[10]将错误率降到了6.7%;2016年采用跳跃连接的ResNet网络[11]将错误率继续下降到了3.08%。经过发展,卷积神经网络CNN从分类任务扩展到检测任务,这就有了Faster RCNN[12],YOLO[13],SSD[14]等经典检测算法。
建立合适的CNN模型,需要根据经验选择许多超参数,如卷积核的大小,每层卷积核的个数,每层的激活函数,学习速率的选择等,好在现在有迁移学习[15],我们可以在经典的卷积神经网络结构上进行适当的调整,或者直接将别人已经训练好的卷积神经网络结构进行适当的参数调整,从而使模型更好得解决我们自己的问题。
有了模型,接着就需要通过数据对模型进行训练,来确定模型中的各个参数。为了防止过拟合,需要对数据进行正则化以及采用Dropout策略[7]和数据扩充[16]手段;为了防止梯度爆炸和梯度消失,需要合适得选择初始化参数;为了提高训练速度,需要将随机梯度下降算法优化为批量梯度下降算法[17]或者更好的Adam[18]算法;为了减小人工标注训练数据的工作量,需要应用无监督[19]或半监督学习[20]。
1.4 主要研究内容与框架
论文对激光雷达点云的目标检测算法进行了研究,对卷积神经网络点云识别算法做了概述,重点对卷积神经网络的原理组成以及训练方法进行了总结,对卷积神经网络的主要优化方法也进行了介绍,最后搭建了一个卷积神经网络用于手写数字识别,表现出了不错的效果。
论文第一章介绍了本文的研究背景和意义,以及激光雷达点云识别算法与卷积神经网络算法的研究现状。
论文第二章介绍基于激光雷达的目标检测算法,首先介绍了常用于无人驾驶汽车的激光雷达原理与性能参数,然后详细介绍了基于传统的机器学习的点云识别算法与基于卷积神经网络的点云识别算法研究概述。
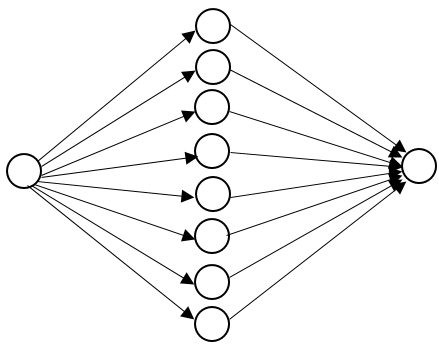
论文第三章介绍BP神经网络的结构与算法,首先对BP神经网络的结构与作用进行介绍,然后介绍模型的前向传播与反向传播算法,最后对激活函数与损失函数进行了介绍。
论文第四章介绍卷积神经网络的结构与算法,首先对卷积神经网络的模型结构进行介绍,然后对模型不同于普通神经网络的前向与反向传播算法的公式进行介绍,最后对经典的网络模型及其特点进行介绍。
论文第五章是对神经网络的训练细节进行了介绍,首先介绍了神经网络训练的基本思路,然后介绍了神经网络的训练技巧与优化算法,最后对当下比较流行的深度学习开源框架进行了比较。
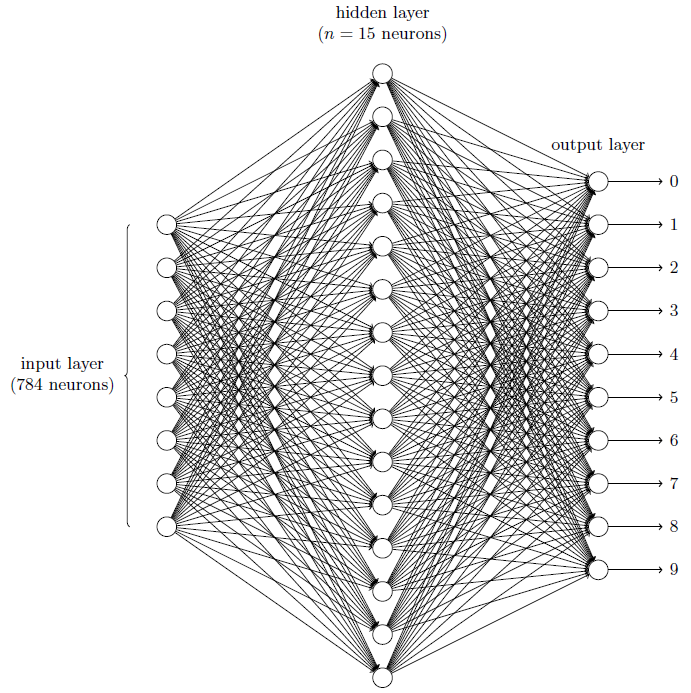
论文第六章是实验部分,通过搭建一个简单的卷积神经网络模型,并使用Dropout正则化,在MINIST数据库上达到了比较理想的分类效果。
第2章 基于激光雷达点云的目标识别算法
2.1 车用激光雷达简介
激光雷达,是以发射激光束探测目标的位置、速度等特征量的雷达系统。其工作原理是向目标发射探测信号(激光束),然后将接收到的从目标反射回来的信号(目标回波)与发射信号进行比较,作适当处理后,就可获得目标的有关信息,如目标距离、方位、高度、速度、姿态、甚至形状等参数。激光传播受外界影响比较小,激光雷达能够检测到100m以上的距离。激光雷达使用激光射线,商用激光雷达波长一般在600-1000nm,比普通雷达的波长长很多,因此激光雷达测量距离信息和表面形状上描述上有更高的精准,可以达到厘米级的精度。
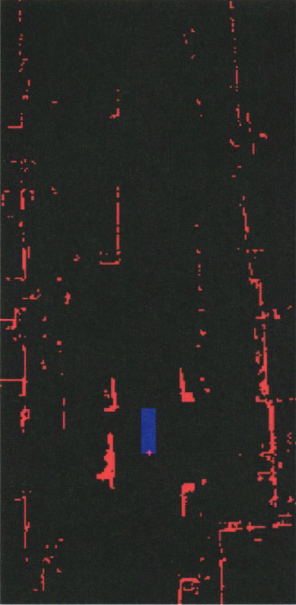
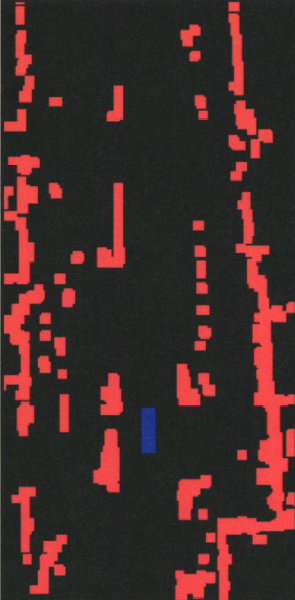
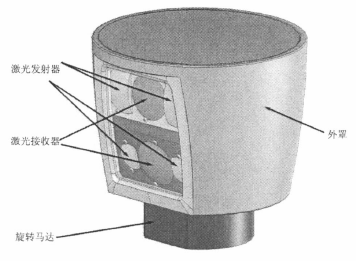
激光雷达系统分为三个部分,分别是激光发射器,扫描和光学部件以及感光元件。激光发射器发射出波长为600-1000nm的激光射线,通过扫描与光学部件,将激光射向周围环境,同时还记录发射角度和反射距离,通过感光元件,可以检测反射回来的光的强度。这样,就可以检测到每一个点的三维空间坐标及光的强度。光的强度与物体的光反射度直接相关,所以从检测到光的强度就可以对检测到的物体类别有初步的判断。激光雷达每旋转一周,将所有反射点的坐标汇合,就形成了点云。
 激光雷达按照激光发射束数量分为单线激光雷达与多线激光雷达。只有一个激光发射束的是单线激光雷达,主要用于移动机器人障碍物检测、碰撞预警、边界检测,由于它结构简单、数据量少、方便处理、功耗低,缺点是视角比较小,探测范围小,只能扫描障碍物的一个界面。一般会将多个单线激光雷达组合安装在移动机器人的不同位置和不同方向,增加探测范围,弥补单线激光雷达的缺点。车用激光雷达主要是多线激光雷达,如美国Velodyne-HDL-64E激光雷达,就有多达64线的激光束。多线激光雷达有更大的探测范围和分辨率,并且可以提供障碍物的高度等轮廓信息,极大的提高了环境的感知能力。
激光雷达按照激光发射束数量分为单线激光雷达与多线激光雷达。只有一个激光发射束的是单线激光雷达,主要用于移动机器人障碍物检测、碰撞预警、边界检测,由于它结构简单、数据量少、方便处理、功耗低,缺点是视角比较小,探测范围小,只能扫描障碍物的一个界面。一般会将多个单线激光雷达组合安装在移动机器人的不同位置和不同方向,增加探测范围,弥补单线激光雷达的缺点。车用激光雷达主要是多线激光雷达,如美国Velodyne-HDL-64E激光雷达,就有多达64线的激光束。多线激光雷达有更大的探测范围和分辨率,并且可以提供障碍物的高度等轮廓信息,极大的提高了环境的感知能力。
图2.1 Velodyne-HDL-64E激光雷达结构图
表2.1 Velodyne-HDL-64E激光雷达性能参数
探测领域 | 范围 | 分辨率 | 精度 |
905nm激光;移动机器人导航 | 水平视场360°,垂直视场26.8°;探测距离:50米(对路面反射率约0.1),120米(对汽车和植物反射率约0.8) | 水平角度分辨率0.09°;垂直角分辨率0.4° | 距离精度:1.5cm |
2.2 基于传统机器学习的算法
基于传统机器学习的算法,首先获得候选障碍物轮廓,再根据轮廓内点云的特征,如几何形状,点云分布,反射强度分布,使用分类器,如支持向量机(Support Vector Machine,SVM),对障碍物进行分类。
以上是毕业论文大纲或资料介绍,该课题完整毕业论文、开题报告、任务书、程序设计、图纸设计等资料请添加微信获取,微信号:bysjorg。
相关图片展示: