部分自动驾驶五座电动轮车总体设计开题报告
2020-02-18 19:35:47
1. 研究目的与意义(文献综述)
1、目的及意义(含国内外的研究现状分析)
1.1总体设计的目的及意义
本次毕业设计旨在完成加装部分自动驾驶功能的五座电动轮车的总体设计任务,总体设计的目的主要包括:
2. 研究的基本内容与方案
2、设计的基本内容、目标、拟采用的技术方案及措施
2.1设计的基本内容
(1)根据设计原则以及汽车相关法规和标准,分析和确定部分自动驾驶五座电动轮车的总体设计方案;
(2)确定整车主要技术参数(主要尺寸、质量和性能参数);
(3)通过整车设计计算与分析,使整车具有合理的动力性、续驶里程、制动性、操纵稳定性、行驶平顺性和通过性;
(4)根据部分自动驾驶的性能要求,确定环境感知系统、决策规划系统、控制执行系统的类型和布置;
(5)确定底盘各主要总成的结构型式、特性参数和布置;
(6)车身造型设计;
(7)绘制底盘布置图、车身外形图、车内部布置图和底盘主要总成运动校核图。
2.2设计的目标
本次设计旨在完成部分自动驾驶五座电动轮车的总体设计,设计目标包括:
(1)设计的目标车型参数由下表给出:
整车参数
| 尺寸参数 | 长/宽/高(mm) | 4610/1790/1500 |
| 轴距(mm) | 2652 | |
| 轮距(前/后)(mm) | 1530/1520 | |
| 质量参数 | 整备质量(kg) | 1450 |
| 满载总质量(kg) | 1800 | |
| 性能参数 | 最高车速(km/h) | 140 |
| 最大爬坡度(%) | 30 | |
| 续驶里程(km) | gt;280(60km/h等速) |
(2)该车为五座电动汽车,本次设计的目标驱动方式为分布式驱动,即采用轮毂电机的形式作为车辆的驱动方式。
(3)本次设计车型是以骏派A70E为参考车型,目标是在电动汽车的基础上加装L2级别部分自动驾驶功能,部分自动驾驶系统可以同时对车辆进行横向和纵向控制,比如泊车辅助系统,但驾驶员需要监测周围环境,在系统做出错误判断时能够及时纠正系统并接管系统。
2.3拟采用的技术方案
2.3.1汽车形式的选择
(1)轴数:采用结构简单、成本低廉的两轴式方案。
(2)驱动形式:考虑到四轮驱动时,电子差速较为复杂,故驱动形式选择4×2后轮驱动。
(3)布置形式:省略了传统汽车所需的机械式操纵换档装置、离合器、变速器、传动轴和机械差速器等,采用传动效率高、空间利用率高的轮毂电机驱动系统,实现驱动电机对所在车轮的直接控制,通过电子线控技术,将实现各电动轮从零到最大速度的无级变速和各电动轮间的差速要求,从而车身更轻,空间更大,传动效率更高。
2.3.2汽车主要参数的选择(主要参数由上述表格数据给出)
(1)汽车主要尺寸的确定:
外廓尺寸长/宽/高(mm):4610/1790/1500
轴距L(mm):2652
前轮距B1和后轮距B2(mm):1530/1520
(2)汽车质量参数的确定:
整车整备质量(kg):1450
满载总质量(kg):1800
(3)汽车性能参数的确定:
动力性参数:
最高车速(km/h):140
最大爬坡度(%):30
续驶里程(km):gt;280(60km/h等速)
(4)制动性参数
汽车制动性应满足,汽车在制动时能在尽可能短的距离内停车且保持方向稳定,下长坡时能维持较低的安全车速并在有一定坡道上长期驻车的能力。具体的制动距离、制动减速度和制动稳定性要求应满足GB7528-2017《机动车运行安全技术条件》的规定。
(5)操作稳定性参数
汽车操纵稳定性的评价参数较多,与总体设计有关并能作为设计指标的有:
1)为了保证有良好的操纵稳定性,汽车应具有一定程度的不足转向。一般汽车稳定性因数K必须大于0。
![]()
式中:m——汽车质量;L——轴距
![]() 、
、![]() ——前后轴车轮侧偏刚度;
——前后轴车轮侧偏刚度;
a、b——质心至前、后轴距离;
2)也可以用汽车前、后轮侧偏角之差![]() 作为评价参数。汽车以0.4g的向心加速度沿定圆转向时,此参数在1°-3°为宜。
作为评价参数。汽车以0.4g的向心加速度沿定圆转向时,此参数在1°-3°为宜。
3)车身侧倾角。汽车以0.4g的向心加速度沿定圆等速行驶时,车身侧倾角控制在3°以内较好,最大不允许超过7°。
4)制动前俯角。为了不影响乘坐舒适性,要求汽车以0.4g的减速度制动时,车身的前俯角不大于1.5°。
(6)平顺性参数
汽车对来自于路面不平引起的振动要有一定的减振和隔振能力,该能力称之为汽车行驶的平顺性。对于乘用汽车而言,人体在汽车的振动和车内环境下,乘坐或操作的综合感觉与感受又称汽车的舒适性。舒适性包括了平顺性、空气调节性能(湿度、温度等)、车内噪声、乘坐环境及驾驶人的操作性能。
汽车行驶平顺性常用汽车振动加速度、车轮相对动载荷、悬架动挠度等参数进行评价。影响汽车行驶平顺性的结构参数主要是悬架的刚度、阻尼、车身质量分布,悬架质量与非悬架质量的质量分配等。悬架的固有频率为1-2Hz,一般是小车偏低,大车偏高。
(7)通过性的几何参数
总体设计要确定的通过性几何参数有:最小离地间隙![]() ,接近角
,接近角![]() ,离去角
,离去角![]() ,纵向通过半径
,纵向通过半径![]() 等。各类汽车的通过性参数视车型和用途而异,其范围见下表。
等。各类汽车的通过性参数视车型和用途而异,其范围见下表。
| 车型 | | | | |
| 4×2乘用车 | 150~220 | 20~30 | 15~22 | 3.0~8.3 |
| 4×4乘用车 | 210~250 | 45~50 | 35~40 | 1.7~3.6 |
| 4×2货车 | 180~300 | 40~60 | 25~45 | 2.3~6.0 |
| 4×4货车、 6×6货车 | 260~350 | 45~60 | 35~45 | 1.9~3.6 |
| 4×2客车、 6×4客车 | 220~370 | 10~40 | 6~20 | 4.0~9.0 |
2.3.3车身形式和车体结构的选择
乘用车车身的基本形式有折背式、直背式和舱背式三种。本次设计选用直背式,直背式车身流线型好,有利于降低空气阻力系数和使行李箱容积增大。
现代许多轿车和大客车上没有车架,其车架的功能由轿车车身或大客车车身骨架承担,故车体结构采用承载式车身。
2.3.4动力装置的选择
本车将采用电池-电机动力装置供给动力。结合所给整车参数,如汽车总质量1800kg、最高车速140km/h、最大爬坡度30%等,初步计算单个电机所需额定功率约25kw,单个电机所需提供的转矩约985N·m,但考虑到采用轮毂电机驱动的方式,省略了传统汽车所需的机械式操纵换档装置、离合器、变速器、传动轴和机械差速器等,将会极大减轻整车整备质量,初步预估可以将汽车总质量减至1600kg。重新计算可知,单个电机所需额定功率约24.79kw,单个电机所需提供的转矩约789.35N·m,从而选择protean产品系列Pd16:额定功率为26kw,最大转矩为800 N·m。
动力电池类型采用三元锂电池并配备电池管理系统负责充放电及再生制动管理以及电池自检等工作。
2.3.5悬架系统的选择
前悬架:采用麦弗逊式独立悬架,结构简单、占用空间小、成本低,有良好的响应性和操控性。
后悬架:扭力梁式半独立悬架结构简单,重量轻;在整车装配时,无须后轮定位,减少装配工时;占用空间小,容易获得较大的尾部空间;弹簧减振器系统便于匹配布置;扭转横梁特性可以替代稳定杆的功用。因此后悬架采用扭力梁式半独立悬架。
2.3.6转向系统的选择
汽车转向系统可按转向能源的不同分为机械转向系统和动力转向系统两大类。动力转向系统由机械转向器和转向加力装置组成。根据助力能源形式的不同可以分为液压助力、气压助力和电动机助力三种类型。
电动助力转向(EPS)系统是指利用直流电动机提供转向动力,辅助驾驶人进行转向操作的转向系统。电动助力转向系统根据其助力结构的不同可以分为电动液压式和电动机直接助力式两种,直接助力式电动转向系统是一种直接依靠电动机提供辅助转矩的动力转向系统,其中没有液压元件,而且只在转向时供能,工作时间约占行驶时间的5%,能源消耗显著降低。因此转向系统选为直接助力式电动转向系统。
电动助力转向类型:根据电动机布置位置不同,直接助力式电动转向系统分为转向轴助力式、齿轮助力式、齿条助力式三种类型, 以下分析三种类型的优缺点和适用车型。
| 序号 | EPS的类型 | 优点 | 缺点 | 适用车型 |
|
1 |
转向轴助力式 | 结构简单、紧凑,制造成本较低,工艺相对简单,助力相应性较好,后期的维护和保养也更加简单。 | 电机的工作噪声和振动较大,电机的扭矩波动对驾驶员手感影响较大。 | 车重较轻,发动机舱较小且对噪声要求相对不高的微型轿车;1.1t以内的小型车。 |
|
2 |
齿轮助力式 | 刚性好、转向路感强;助力不需要管柱部件传递,电机可以提供更大的助力。 | 万向节的存在会影响助力控制特性精确度。 |
1.3t以内的中小型车。 |
|
3 |
齿条助力式 |
能提供更大的助力,能量损失更少。 |
整套系统结构复杂,成本最高。 | 应用于载荷较大的豪华轿车或商务车领域;2.2t以内的中型车。 |
本次设计车型的整备质量约1250kg,并考虑到成本因素,选择齿轮助力式电动助力转向系统。
转向操纵机构的组成:转向盘、转向柱管、转向轴、上万向节、下万向节和转向传动轴等。
转向器类型:采用齿轮齿条式转向器。
转向传动机构:与独立悬架配用的转向传动机构,包括转向横拉杆、转向节臂、转向节等。
2.3.7制动系统的选择
本次设计采用线控制动系统,对于能量回收,再加装一个ibooster装置。 对于自动驾驶方面,为实现紧急制动,可以配有自动紧急制动系统(AEB)。
制动执行模块的设计可以作为传统制动系统的设计,制动器采用滑动钳盘式制动器,主要由制动盘、制动钳总成、制动钳支架、摩擦块等组成。
另外盘式制动器驻车制动机构可把后轮行车制动器兼做驻车制动器,可在盘内加装驻车制动机构,驻车制动机构安装于制动盘内部。
制动回路为X形,采用液压传动方式。
2.3.8轮胎的选择
选用子午线轮胎。子午线轮胎的特点是滚动阻力小、温升低、胎体缓冲性能和胎面附着性能都比斜交线轮胎要好,装车后油耗低、耐磨损寿命长、高速性能好,因此是汽车设计时首选的轮胎。
2.3.9车身外形
车身外形根据所给参考车型骏派A70E进行确定,再在车身上加装摄像头、雷达等装置用以实现自动驾驶的功能。
2.3.10部分自动驾驶的实现
无人驾驶汽车, 主要由环境感知系统、定位导航系统、路径规划系统、速度控制系统、运动控制系统、辅助驾驶系统、中央处理单元、数据传输总线等组成。环境感知环节通过各种传感器采集周围环境基本信息, 是自动驾驶的基础, 主要包括激光雷达、摄像头、毫米波雷达、超声波传感器和GPS导航系统等。
激光雷达:激光雷达是激光探测及测距系统的简称, 主要构成要素包括发射系统、接收系统和信号处理系统, 是军转民的高精度雷达技术。根据扫描机构的不同,激光雷达有二维和三维两种。与三维激光测距雷达相比,二维激光雷达只在一个平面上扫描,结构简单,测距速度快,系统稳定可靠,但是也不可否认,将二维激光雷达用于地形复杂、路面高低不平的环境时,由于其只能在一个平面上进行单线扫描,顾不可避免会出现数据失真和虚报的现象。
摄像头:摄像头工作原理是景物通过镜片组生成光学图像投射在CMOS光电传感器上, 经过模数转换后变为数字信号, 再由DSP将信号处理成特定格式的图像在显示屏上显示。通过对采集图像进行计算机算法分析,车载摄像头能够识别行人、自行车、机动车、道路轨迹线、路牌、信号灯等环境信息。
毫米波雷达:毫米波雷达是工作在30~300GHz毫米波波段探测的雷达,毫米波雷达波束窄,角分辨率高,频带宽,隐蔽性好,抗干扰能力强,体积小,重量轻,而最大优点是可测距离远,不受雨雪等恶劣天气的影响,抗环境变化能力强。
超声波传感器:超声波传感器是利用超声波的特性, 将超声波信号转换成其它能量信号的传感器, 具有频率高、波长短、绕射现象小等特点,对液体、固体的穿透性较强。超声波传感器的数据处理简单快速,检测距离较短,主要用于近距离障碍物检测,初期主要用于车辆制动辅助系统和倒车雷达, 用来检测障碍物避免碰撞和擦蹭, 目前已被研究应用在自动泊车和自动刹车系统。
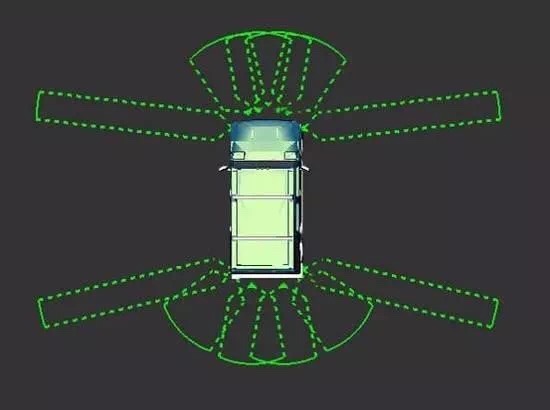
多传感器融合是实现自动驾驶的必然发展趋势。本车环境感知系统设计拟采用:
1个前向摄像头,位于内后视镜后方;
2个广角360度摄像头,分别位于前后保险杠内;
1个激光雷达,安装在车顶上;
2个毫米波雷达,分别位于前后保险杠内;
12个超声波雷达,前后保险杠内各4个短距超声波雷达UPA,探测距离一般在15~250cm之间;左右两侧各2个长距超声波雷达APA,探测距离一般在30~500cm之间。如下图所示:
2.4拟采用的措施
结合《汽车构造》,《汽车设计》,《汽车理论》等课本完成相应的理论设计任务,同时利用计算机辅助设计软件来构建模型和绘制相应图纸,最后利用相应软件来完成强度校核和仿真。所需软件如下:
三维建模:CATIA
二维绘图:AutoCAD、CAXA
有限元分析:ANSYS
整车运行仿真:MATLAB、CARSIM、PRESCAN
3. 研究计划与安排
3、进度安排
| 1-2(7 学期第19-20周) | 确定毕业设计选题、完善毕业设计任务书(相关参数)、校内外资料收集 |
| 3(8 学期第1周) | 方案构思、文献检索、完成开题报告 |
| 4~5(8学期第2-3周) | 外文翻译、资料再收集 |
| 6~8(8学期第4-6周) | 设计计算、草图绘制(3.14开题答辩) |
| 9~11(8学期第7-9周) | 图样绘制、编写设计计算说明书(论文)、(4.25中期答辩) |
| 12~14(8学期第10-12周) | 图样及设计计算说明书整理、资料袋整理,答辩资格审查 |
| 15(8学期第13周) | 学生提出答辩申请,并作答辩准备;教师审阅图纸、说明书 |
| 16~17(8学期第14-15周) | 参加答辩 |
4. 参考文献(12篇以上)
4、阅读的参考文献
[1]刘文博.面向电动轮车节能的传动控制系统优化方法研究[d].湖南大学,2017.
[2] alcázar-garcía d, romeral martínez l.energy consumption and total vehicle efficiency calculation procedure forelectric vehicles (ev, hev and phev)[c]. proceedings of the asme 2018 international design engineering technicalconferences and computers and information in engineering conference,2018.



