基于多智能体的混驾交通流仿真建模毕业论文
2020-02-19 16:39:52
摘 要
随着智能网联车的研究深入开展,未来将面临多驾驶主体混驾的交通环境,为了分析刻画混驾交通流的特性规律,建立混驾交通仿真平台展开实验是一种重要研究手段。本文采用多智能系统理论,构建了车辆智能体模型和混驾交通流多智能体仿真系统,并利用C 搭建了混驾交通流多智能体系统仿真平台。选取全速度差(Full Velocity Difference, FVD)模型模拟人驾车辆的跟驰行为,选取美国加州大学伯克利分校PATH实验室研究的协同自适应巡航控制(Cooperation Adaptive Cruise Control, CACC)模型作为智能网联车辆跟驰模型。通过模拟连续交通流,与人驾交通流的三大经典连续流模型的特性对比分析,验证了仿真平台的真实可靠性;基于本平台,开展混驾交通流与单一人驾交通流运行仿真实验,对比分析结果表明:混驾交通流多智能体系统会以更小的车头间距运行,其运行速度也较快,即使在车流密度较高的时候,也会以较高的速度运行,道路整体的通行能力增大;同时,智能网联车辆在车路协同环境下,较一般人驾车辆反应更加灵敏,混驾交通流速度变化曲线较为平滑,交通流的稳定性较好。
关键词:智能网联车辆;混驾交通流;多智能体;跟驰规则;仿真建模
Abstract
With the in-depth development of the research on Intelligent Connected Vehicles, the future will be faced with the traffic environment of multi-agent mixed driving. In order to analyze and describe the characteristics of mixed driving traffic flow, the establishment of mixed driving traffic simulation platform to carry out experiments is an important research method. In this paper, the vehicle agent model and the multi-agent simulation system of mixed traffic flow are constructed on the basis of the theory of multi-agent system, and the simulation platform of multi-agent system for mixed traffic flow is built by C . The Full Velocity Difference (FVD) model is selected to simulate the car following behavior of vehicles which are steered by humans, and the Cooperation Adaptive Cruise Control (CACC) model which is studied by the PATH laboratory at the University of California, Berkeley is selected to simulate the car following behavior of intelligent connected vehicles. By simulating continuous traffic flow and comparing it with the characteristics of three classical continuous flow models of human driving traffic flow, the reliability of the simulation platform is verified. Based on this platform, the simulation experiment of mixed driving traffic flow and single-person driving traffic flow was carried out. The comparative analysis results showed that the multi-agent system of mixed traffic flow will run at a smaller space headway and a faster speed. Even when the traffic density is high, it will run at a higher speed, and the overall capacity of the road will increase. Meanwhile, under the cooperative vehicles infrastructure environment, intelligent connected vehicles are more responsive than vehicles which are steered by humans, and the change curve of mixed driving traffic flow speed is relatively smooth, and the stability of traffic flow is better.
Key Words:intelligent connected vehicles; mixed traffic flow; multi-agent system; car-following theory; simulation modeling
目 录
第1章 绪论 1
1.1 研究背景 1
1.2 研究目的与意义 1
1.3 国内外研究现状 2
1.3.1 车辆跟驰模型研究 2
1.3.2 多智能体理论在交通领域的研究 2
1.3.3 建模仿真在交通领域的研究 3
1.3.4 国内外研究现状小结 3
1.4 研究内容和技术路线 4
1.5 论文框架 5
第2章 多智能体理论及其应用 6
2.1 智能体与多智能体系统概述 6
2.1.1 智能体 6
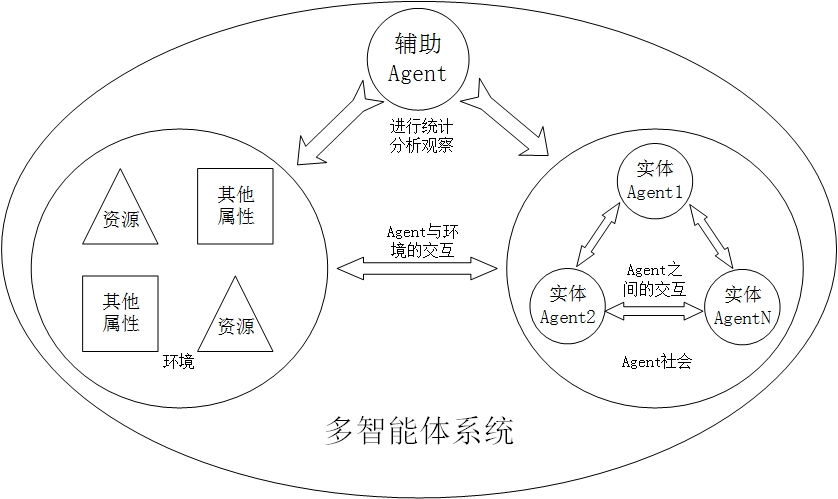
2.1.2多智能体系统 7
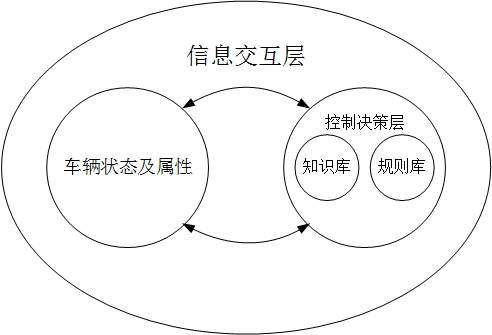
2.2 车辆智能体定义与模型描述 8
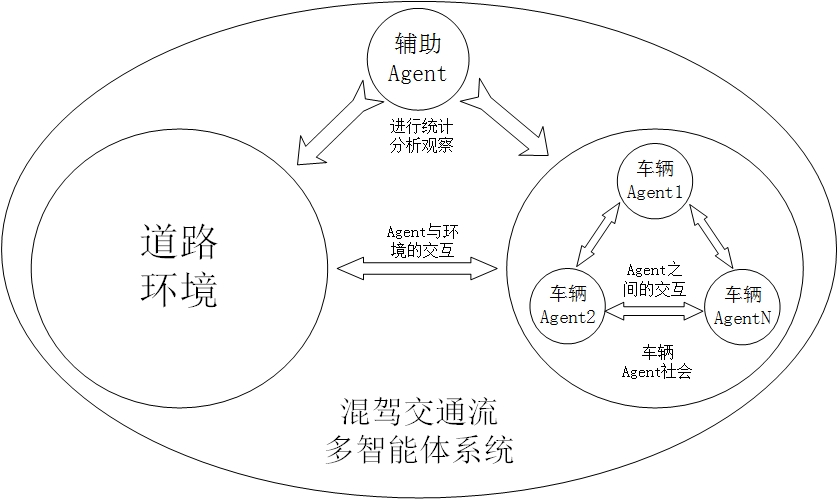
2.3 混驾交通流多智能体系统定义与模型描述 11
2.4 本章小结 12
第3章 基于C 的混驾交通流多智能体系统仿真建模 14
3.1 系统构成 14
3.2 车辆智能体建模 15
3.3 混驾交通流多智能体系统建模 18
3.3.1 参数确定 18
3.3.2 仿真建模 18
3.4 本章小结 20
第4章 仿真实验结果检验与评价 21
4.1 仿真平台的真实性检验 21
4.1.1 速度-密度关系 21
4.1.2 流量-密度关系 23
4.1.3 速度-流量关系 24
4.2 混驾交通流多智能体系统仿真评价 25
4.2.1 速度-密度关系 27
4.2.2 流量-密度关系 28
4.2.3 速度-流量关系 29
4.3 混驾交通流多智能体系统跟驰特性总结 30
第5章 总结与展望 31
5.1 研究结论 31
5.2 创新之处 31
5.3 研究展望 32
参考文献 33
附录 35
致谢 52
第1章 绪论
1.1 研究背景
随着互联网、人工智能行业的迅速发展,欧盟、美国以及中国等多个国家和地区迅速将物联网列为国家战略新兴发展产业,车联网作为物联网在智能交通系统当中的重要体现,近10 年来取得了飞速的发展与进步。在未来车路协同环境下,必然产生智能网联车辆和人驾车辆混行的交通现象,鉴于不同驾驶主体操作的车辆混合构成的混驾交通流的复杂特性,探讨智能网联车辆跟驰规律有着很强的现实意义。
同时,自20世纪70年代以来,多智能体系统(MAS)研究的理论与技术频繁的出现在各种应用系统中。MAS 是由多个具备一定感知能力、控制能力、通信能力的智能体组成的集合,使用分布式问题求解方法的多智能体系统由于其各个智能体之间目标一致,整个系统可看作一个团队的工作。而在交通领域中,人们利用多智能体理论在城市建模与仿真、智能交通管理与控制、动态路径规划和车路协同技术等方面取得了较大的进展,他们通过构建交通智能体进而搭建交通多智能体系统,通过互相协作完成各项交通任务,因此,为交通系统这一具有很大突变性和随机性的典型分布式系统的协调控制和建模提供了解决方案。
1.2 研究目的与意义
本文将采用建模与仿真的方法,在传统跟驰模型和智能网联车辆控制模型的基础上,分析智能体的特性,并结合智能网联车辆与人驾车辆的跟驰特性,进而构建车辆智能体模型,然后分析多智能体系统特性,建立混驾交通流多智能体系统进行仿真实验,最后对混驾交通流下的交通特性进行分析。
本文的研究意义主要由三个方面:
- 随着具有先进的辅助驾驶系统车辆陆续在道路上使用,道路交通流环境也必将发生变化。然而国内大多数研究都是针对在完全车联网环境下的交通特征,鲜有提及在智能网联车与人驾车辆混合交通环境背景下交通问题。因此,对未来车路协同环境下的混驾交通流仿真建模的研究具有重要的现实意义。
- 随着计算机网络和计算机通讯技术的快速发展,多智能体系统引起重视。由于城市交通系统具有规模庞大、关系复杂的特点,将多智能体技术应用到交通系统是一种趋势。本文将根据多智能体理论,建立车辆智能体模型搭建混驾交通流多智能体系统,为多智能体的应用提供思路。
- 基于车辆网技术的不断成熟,未来多智能体理论将会应用到车联网的技术中,而智能网联车辆也会应用其技术进行协调管理,因此本文基于多智能体理论探究智能网联车辆的跟驰特性具有一定的理论意义。
1.3 国内外研究现状
1.3.1 车辆跟驰模型研究
在人驾车辆的跟驰模型方面,王殿海等人[1]根据建模思想将跟驰行为分成交通工程角度和统计物理角度,然后分别介绍两个角度下各种不同跟驰模型的建模思路、模型结构、参数标定和扩展研究,总结了跟驰理论60年来的发展历程,有很大的指导意义。Tao等人[2]以视觉角度和其变化率作为刺激,改进了FVD模型,提出了一种基于视角的车辆跟驰模型。结果表明诱导车辆的宽度对交通流的稳定性有很大影响。
在智能网联车辆的跟驰模型方面,大多数研究都是针对在完全车联网环境下的交通特征,而对混驾车流的交通特性鲜有研究。Wang等人[3]提出了考虑V2V通信异常的多模式协同自适应巡航切换控制模型,避免了车辆排间通信异常的影响,保证车队的稳定性。Ding等人[4]采用随机优化方法,使得评价持续时间最小,然后利用加速试验中的试验结果,运用重要性抽样理论对自动车辆在自然驾驶条件下的安全性能进行评价。结果表明,加速试验可以将碰撞、伤害或冲突事件的评估时间缩短300到100000次,这能够大大缩短AVS的开发和验证时间。秦严严等人[5]分析了三类ACC/CACC车辆的跟驰模型的建模思路和优缺点,然后从道路通行能力、交通安全和交通流稳定性3方面,分析了ACC/CACC车辆对交通流特性的影响。
1.3.2 多智能体理论在交通领域的研究
目前多智能体系统因其能够比较准确的模拟现实中智慧群体的运行状况,从而得到了研究者的广泛关注,而在交通领域中,多智能体系统的发展也在逐步壮大,其应用主要包括交通管理系统、城市交通控制、交通枢纽、交通诱导等[6]。Burmeister[7]采用BDI体系结构,使用AOTs技术构建多智能提系统,描述了其在交通系统运用中的潜力。Jin等人[8]提出了一种改进的多智能体交叉口管理系统,他们通过车联网技术使得车辆智能体形成队列,利用队列中的车头与交叉口进行数据交互进而安排车流的运动。郭建刚等[9]分析了多智能体在交通系统协调控制模型的应用现状,分析其特点与不足并提出该模型应走向集成化、智能化、实用化和深入化。赵建有[10]针对城市原交通流控制系统中的不足提出了构建基于多智能体的智能城市交通流控制系统的思路,给出了系统的基本框架和方法,具有一定的理论指导意义。戴技才等人[11]基于多智能体理论提出了微观交通流模型,并创建了一种新的跟驰方法及换道策略,模拟城市主干路和高速公路交通流,其中,汽车智能体的建立具有一定的参考价值。
1.3.3 建模仿真在交通领域的研究
在最后建模仿真方面,Mandiau等人[12]提出了一种应用于交叉口仿真的多智能体协调机制,他们利用基本的决策矩阵来解决多智能体协调控制,并利用ARCHISIM对其结果进行检验。张钰[13]针对地铁交通中乘客过多造成的拥挤提出了一种基于多智能体交通仿真的拥堵预测方法来预测早高峰时期地铁区间的拥堵情况。通过居民OD表来构建基于多智能体的交通仿真框架进行仿真模拟,最后输出结果进行评价分析。陈子轩[14]详细地讲解了仿真平台的开发过程,以目前较为成熟的协同自适应巡航控制(CACC)算法为仿真目标,以实地路网建立仿真实例,构建了基于 VISSIM 面向 ICV 的仿真平台,验证了仿真平台的有效性。对于智能网联车辆的仿真有着重大的意义。朱朝磊[15]建立了微观交通智能体构成的多智能体系统模型架构,设计了快速路主路和入口匝道的车辆智能体在合流区的协作融合控制算法,建立了快速路网的宏观交通多智能体系统模型架构,使用Netlogo对其进行可视化仿真,研究不同交通模型对交通流的影响。朱湧等人[16]基于多智能体理论,对城市道路交通要素进行多智能体建模,建立多智能体交通流预测体系结构; 然后基于非线性时间序列预测法提出多智能体模型下的改进算法; 最后在 NETLOGO 环境下进行仿真试验。李志伟[17]立足于智能网联汽车与人驾汽车混合的交通环境,对高速公路路段密度估计方法进行研宄,进而估计道路交通状态。彭军芬[18]基于NI公司的Starter Kit 2.0硬件平台,研究开发了一套具备演示功能的车辆跟驰行为仿真实验系统。其中对于跟驰特性的研究具有一定的指导意义。
1.3.4 国内外研究现状小结
在未来车路协同环境下,必然产生智能网联车辆和人驾车辆混行的交通现象,而在现有的大多交通流研究中都是针对完全车联网环境下的智能网联车辆交通特性进行研究,而对于过渡段人驾车辆和智能网联车辆的混驾交通流并没有太多的研究,因此探讨智能网联车辆在混驾交通流中的跟驰规律有着很强的现实意义。
同时,随着互联网、人工智能行业的迅速发展,多智能体理论的研究和技术应用于越来越多的领域和系统构建中,而国内外对于多智能体理论在交通领域的研究大多停留于在系统框架的搭建中,实际的应用成果较少,未建立起可靠的实用体系,因此,本文正是基于多智能体理论,进而搭建混驾交通流建模仿真系统,加深多智能体理论的应用。
1.4 研究内容和技术路线
- 混驾交通流的特性分析
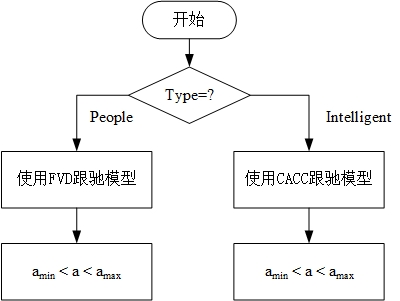
根据混驾交通流下智能网联车辆延滞性和安全性的要求寻找适合的跟驰模型模拟智能网联车辆的跟驰行为,同时考虑人驾车辆的跟驰特性,寻找合适的跟驰模型模拟其跟驰行为。
- 多智能体理论的应用
根据多智能体理论,针对多智能体的自主性、交互性、反应性和主动性等基本特征,结合智能网联车辆自动行驶、可以与周围车辆进行信息交互、感应前车运行状态进行车速调整和积极主动适应周围环境等特性,进而对智能网联车辆进行建模。
- 仿真实验检验和评价
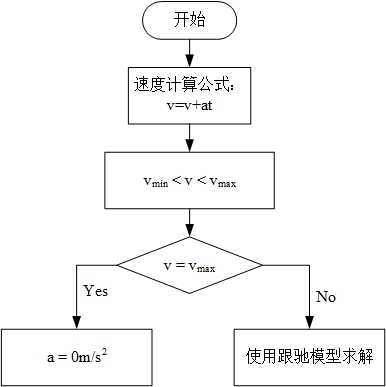
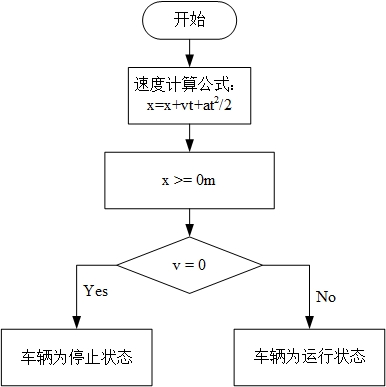
利用C 语言对仿真平台进行搭建,通过考虑车辆智能体感知、决策等能力对其定下变量与约束规则,同时考虑到智能体特性对车辆自身属性的影响,进而搭建车辆智能体模型,从而组成多车辆智能体系统,最后进行仿真实验,对本文理论进行实证分析,对混驾交通流下的智能网联车辆的交通特性进行仿真评价。
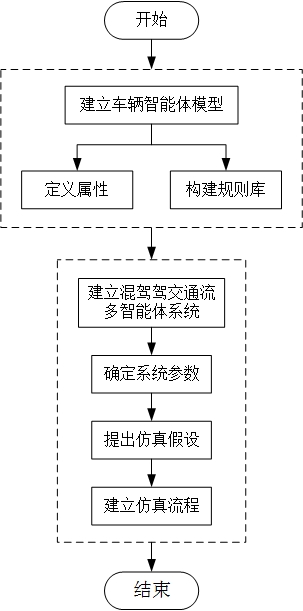
论文的技术路线如图1-1:
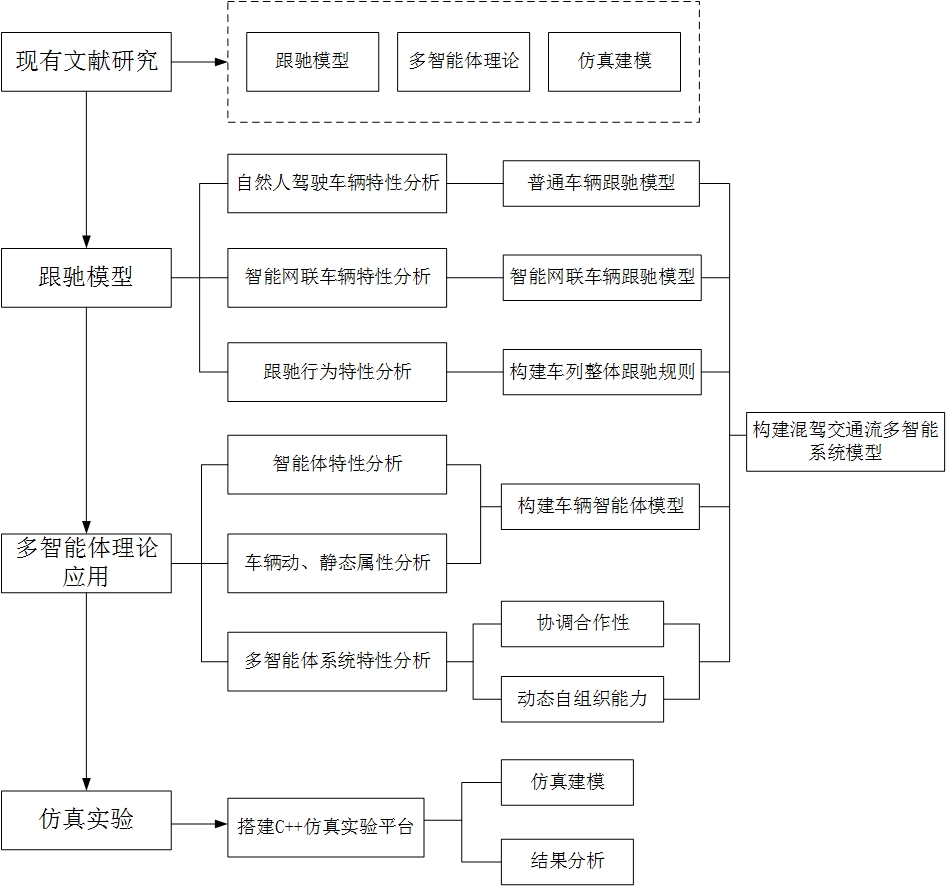
图 1-1 论文技术路线
1.5 论文框架
本设计共包括四大章节,各章节主要内容如下所示:
第一章:绪论。本章主要介绍了本研究的背景与意义,梳理了跟驰模型的发展以及多智能体理论在交通领域方面的应用历程,然后介绍了本文的主要研究内容。
第二章:多智能体理论及其应用。本章根据智能体和多智能体系统特征,构建车辆智能体和混驾交通流多智能体系统,同时分别选取相应的跟驰模型模模拟车辆智能体的跟驰行为,最后考虑到实际场景,将车身长度和安全停车间距加入到跟驰模型中,以完善仿真场景。
第三章:基于C 编程语言的混驾交通流多智能体系统仿真建模。本章基于C 面向对象和类的特性对车辆智能体进行建模,之后根据实际参数和基本假设构建了混驾交通流多智能体系统模型进行仿真实验。
第四章:仿真实验结果检验与评价。本章首先模拟人驾连续流场景来和三大经典连续流模型进行对比分析,验证仿真系统的真实性。接着通过模拟混驾连续流流多智能体系统来和人驾交通流数据进行分析,得出混驾交通流多智能体系统的跟驰特性。
第五章:总结与展望。本章对整个论文进行了宏观上的总结,对本次研究进行了客观的评价,指出本次研究过程中的不足,并对研究的后续发展提出了中肯的改进意见。
第2章 多智能体理论及其应用
2.1 智能体与多智能体系统概述
2.1.1 智能体
智能体(Agent)是人工智能领域发展起来的一个概念,顾名思义,是具有智能的个体。虽然含义浅显易懂,但如今它并没有得到一个确切的、公认的定义,关于智能体的概念,不同的学者根据自己的研究背景给出了不同的观点与看法。例如Jennings等人提出的“智能体是存在于某系统中,能够灵活自主的对其所处的环境做出反应完成其特定目标的行为主体”[19],张秋花等人提出的“智能体是处在某个环境中的计算机系统,该系统能根据自身对环境的观察和感受,按照自己所具有的知识,有能力在这个环境中自助行动以实现其设计目的”[20]等。但不管智能体的定义如何,它所具有的基本特性都得到了大家的认可,主要包括:
- 自治性:智能体具有其自身的控制规则,能在没有人或者其它智能体的干预下持续运行,根据其内在规则以及感知到的外界信息进行控制,而不需要外界的辅助。
- 反应性:智能体能够感知外界的刺激进而做出适当的反应。
- 社会性:智能体可以通过一定的手段与其它智能体实现多种形式的交互,更能够与别的智能体进行有效的协同合作。
- 主动学习性:智能体能够遵守规则,同时根据以往积累的经验进行不断地学习,以更新其行为适应当前环境的变化。
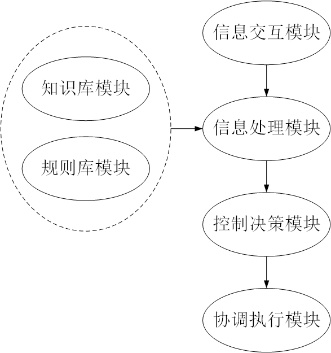
智能体的种类繁多,但是不管是哪种智能体,它都需要建立自己的规则,创建自己的知识库,通过与外界环境以及其它智能体的交互进行数据收集,根据知识库与建立的规则进行综合判断,实时的做出最适合的执行方案。因此,智能体的抽象结构模型如下图所示:
以上是毕业论文大纲或资料介绍,该课题完整毕业论文、开题报告、任务书、程序设计、图纸设计等资料请添加微信获取,微信号:bysjorg。
相关图片展示: