150m作业水深钻井平台拖带系统设计及强度校核毕业论文
2020-02-18 00:35:05
摘 要
伴随着海洋经济的高速发展,海洋工程、船舶工程、港口建设等不断发展,海上平台的拖航作业也日益繁多,如何保证海上拖航作业快速高效且安全进行成为现今海洋工程的工作重点。过去的拖带作业主要依靠经验进行,缺乏系统的理论指导,产生了一系列的海损意外事故,在已发生的所有海洋平台拖航事故中,自升式钻井平台所发生的拖航事故所占比例最高。因此,为保证拖航过程中船舶和平台在使用过程中的安全,本文设计了一种针对150米作业水深的自升式钻井平台的拖带系统,为平台进行安全可靠的移位提供保障。
本文在归纳总结了目前国内外研究现状的基础上,考虑实际情况选择了拖船,并根据相关规范确定了可行的拖带方式、选择了拖曳设备。接着计算了在不同海况、不同航速下平台所受的风力、海流作用力及波浪力,并对其进行了校核以便确定拖带所需的拖船数量。最后,本文使用有限元分析软件对钻井平台拖带系统的包括牵引垫、导缆器在内的主要受力构件的结构强度进行了分析校核,综合考虑平台阻力、拖船拖力以及拖带系统主要受力构件的结构强度,最终设计了一种拖带系统的布置方案,并对拖船、拖航速度等进行了选择。
本文的主要特点在于设计过程是逐步近似螺旋式上升的,上一步的计算结果是下一步计算的基础,为下一步的计算提供依据。逻辑缜密,条理清晰。
关键词:钻井平台;拖带系统;阻力计算;强度校核;有限元分析
Abstract
With the rapid development of Marine economy and the continuous development of Marine engineering, ship engineering and port construction, the towing operation of offshore platforms is also increasingly diversified. How to ensure the fast, efficient and safe towing operation at sea has become the focus of current Marine engineering work. Towing operations in the past mainly relied on experience and lacked systematic theoretical guidance, resulting in a series of average accidents. Among all the towing accidents of offshore platforms, the jack-up drilling platform accounted for the highest proportion. Therefore, in order to ensure the safety of the ship and the platform in the process of towing, this paper designs a towing system for the jack-up drilling platform with a water depth of 150 meters, which provides guarantee for the safe and reliable displacement of the platform.
On the basis of summarizing the current research status at home and abroad, this paper chooses the tugboat considering the actual situation, and determines the feasible towing mode and towing equipment according to the relevant specifications. Then the wind force, current force and wave force of the platform under different sea conditions and speeds are calculated and checked to determine the number of tugboats required for towing. Finally, this article USES the finite element analysis software of the rig towing system including traction pad, chock, structural strength of main stress components are analyzed, considering resistance, drag force and the tugboat towing system platform structure strength of main stress components, the final design of a towing system layout, and for the selection, tugboat towing speed, etc.
The main feature of this paper is that the design process is gradually approximate upward spiral, and the calculation results of the previous step are the basis for the next step, providing a basis for the next step.
Key Words: Drilling platform; Towing system; Resistance calculation; Strength check; Finite element analysis
目 录
第1章 绪论 1
1.1 研究背景及意义 1
1.2 国内外研究现状 2
1.3 本文工作 3
第2章 自升式钻井平台与拖带系统 4
2.1 钻井平台主尺度 4
2.2 拖带方式 5
2.3 拖曳设备 5
2.4 拖船的选用 5
2.4.1 主拖船 5
2.4.2 辅助拖船 6
第3章 阻力计算 7
3.1 平台总阻力计算 7
3.1.1 海洋环境条件与作业前提 7
3.1.2 风力 7
3.1.3 海流作用力 8
3.1.4 波浪力 9
3.1.5 标准海况下的阻力分析 9
3.1.6 其他海况下的阻力分析 11
3.2 拖船阻力 13
3.2.1 基本阻力 13
3.2.1.1 摩擦阻力 13
3.2.1.2 剩余阻力 14
3.2.2 附加阻力 15
3.2.3 拖船总阻力 17
3.3 系柱拖力 18
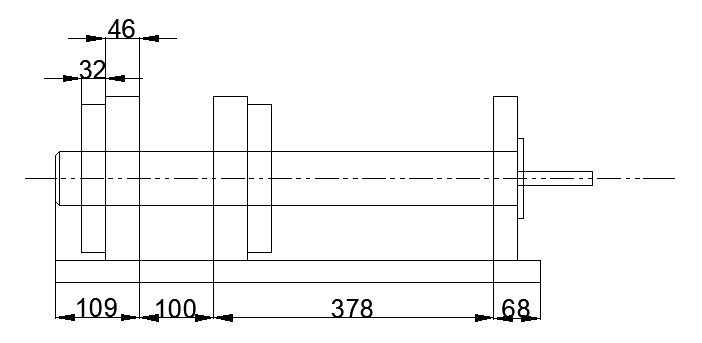
第4章 牵引垫和拖带导缆器校核 20
4.1 校核规范与方法 20
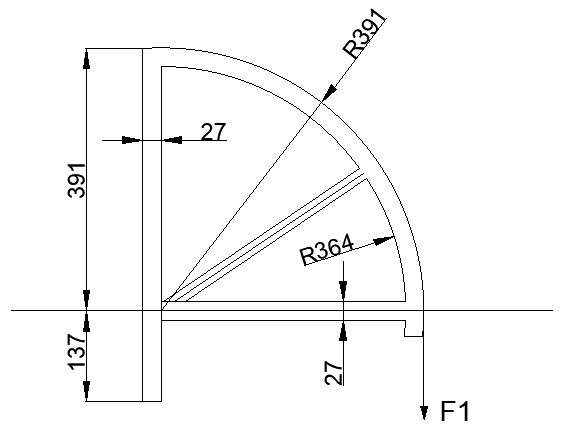
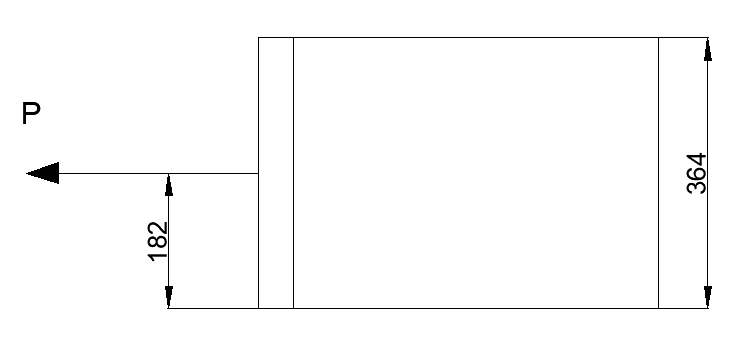
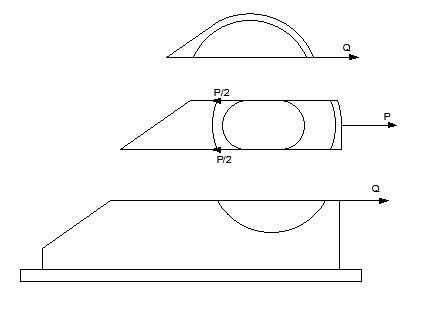
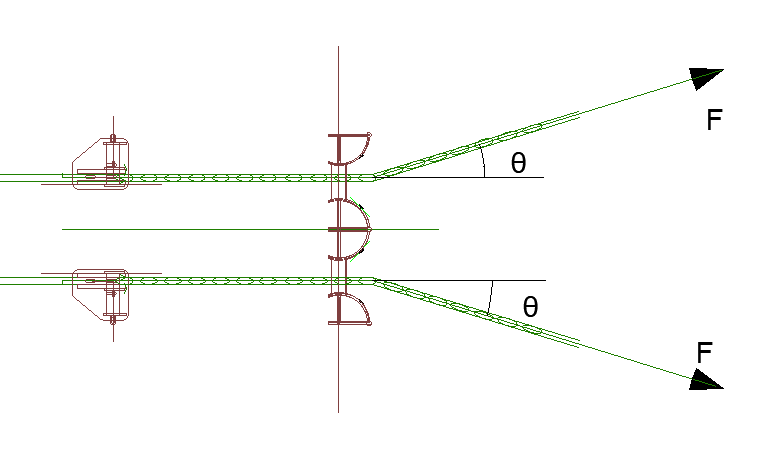
4.2 拖带导缆器的应力校核 20
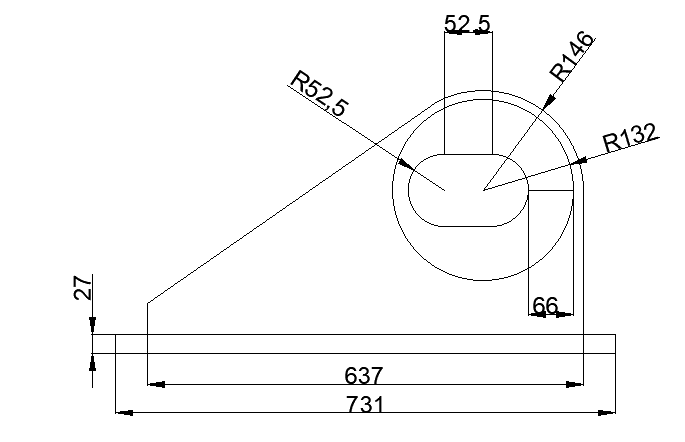
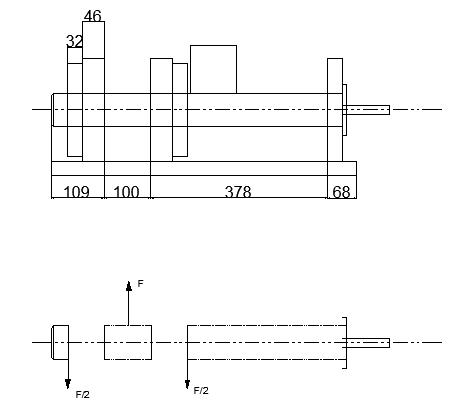
4.3 牵引垫的应力校核 22
4.3.1销轴承与支架连接处的应力校核 22
4.3.2 基座处的应力校核 24
4.3.3 轴承处的应力校核 25
4.4 结论 27
第5章 导缆器有限元校核 27
5.1 有限元法 27
5.2 几何模型 27
5.2.1 坐标系 27
5.2.2 材料 28
5.2.3 单位及尺寸 28
5.3 设计载荷 28
5.4 钻井平台三维模型 30
5.5 边界条件 32
5.6 校核结果 34
第6章 拖带系统布置设计 39
6.1 拖带方式设计 39
6.1.1 阻力校核 39
6.1.2 拖航速度 40
6.1.3 拖带系统布置及注意事项 40
6.1.4 拖带流程 41
6.2 拖曳设备与索具的选择 41
6.2.1 一般规定 41
6.2.2 拖缆机 42
6.2.3 拖曳设备与索具 42
参考文献 45
第1章 绪论
1.1 研究背景及意义
随着人类社会的发展,陆地资源不断被大规模的开采,可供使用的部分日益匮乏,而海洋拥有地球超过半数的资源但由于技术条件的限制只进行了极少的开发和利用。因此人们开始把目光聚集在海洋资源的开发上,海洋中蕴藏的石油、天然气既是重要的工业能源也是重要的战略物。
我国近年来对海洋石油进行了一系列的勘探和开发,其中自升式钻井平台是较为常用的一种大型海洋石油开采设备,与之相对应的,自升式钻井平台拖航作业也越来越频繁。自升式钻井平台又被称为甲板升降式钻井平台,具有良好的海域移动性、可以在动态的海洋环境下稳定作业、适应多种水深条件等优点,且配备有各种现代化设备,故其可在较为恶劣的海况和较深水域条件下进行工作。其数量大约占海上移动式钻井平台的60%,是目前应用最为广泛的移动式海洋平台。[[1]]
如图1.1.1所示为全球最大的自升式钻井平台“Maersk Intrepid”号。

图1.1.1 全球最大自升式钻井平台“Maersk Intrepid”号
我国对海上石油资源的开采已经经历了一段时期,于初期建造的相当一部分钻井平台经过工程作业的损耗后开始经入了维修保养期,但钻井平台这类大型的海洋工程设备不具备在工作地点进行大规模维护和保养的能力,基于工程作业安全性的考虑,必须将钻井平台拖曳至修船基地进行整体的检修,如何将大型钻井平台安全平稳、高速快捷地运送到特定检修地点是一项复杂且艰巨的任务。
由此,为保证拖航的安全性与可靠性,海上钻井平台的拖带系统应运而生。如图1.1.2所示为“探索者海洋石油931”大型钻井平台进行拖带作业的示意图。

图1.1.2 “探索者海洋石油931”大型钻井平台拖带作业
1.2 国内外研究现状
自从五十年代开始,很多的专家学者对拖航的操纵性能及对拖航系统造成影响的因素开展了大量的理论研究。国外学者Inoue[[2]]基于航向稳定性问题对多个被拖带船舶进行了研究,提出了对航向稳定性造成影响的两个因素,即拖缆质量和拖缆弹性。Strandhagen[[3]]针对拖缆长度和拖带作用点的位置两个因素对拖航系统航向稳定性进行了分析。Ohkusu[[4]]对拖体-缆索的数学模型进行了建立并从中推导出了拖体-缆索扰动运动方程,并针对拖体的纵向运动进行了详细的分析。Wulder[[5]]等人分析了拖轮和大型船舶之间的相互作用力,针对拖船对大型船舶的辅助运动进行了实时的仿真研究。Charters[[6]]等人在线性不变拖航理论的基础上,定义了一个新的概念即拖航航向稳定性,并分析了浅水环境下拖船的稳定性。TaoJiang[[7]]等人对PID自动舵控制的拖航航向稳定性进行了研究。Bernitas[[8]]等人对被拖船的非线性稳定性进行了研究。
在拖航操纵性领域,国内的研究与国外相比还有很大的差距。杨盐生等人构建了港内拖轮辅助拖船运动的数学模型。朱军提出了一种非线性整体的拖带动力学模型,设计了一种与被拖带船舶的拖点位置相匹配的方法。严似松等人使用时域方法对拖带系统的航向及其运动稳定问题进行了分析研究[[9]]。
本文所采用的分析方法是有限元分析法,这一工程中常用的方法早在20世纪60年代就已经被提出,随后国际上对有限元软件的开发投入了大量的人力和物力,但真正的计算机辅助工程软件诞生于70年代初期。最近15年是计算机辅助工程软件商品化的极速发展阶段,开发商对软件的功能、性能、界面及处理能力都进行了很大程度上的改进与扩充,因此,目前市面上较为知名的计算机辅助工程软件基本上能满足大多数用户的使用需求,但目前市面上存在的商用工程软件仍未成为全功能的分析器,它们在很长的一段时间内也不可能自动全面分析建立合理的模型、设定合理的边界条件、选择最佳网格类型、进行网格界面处理以及对计算结果进行分析和判断等,最终还是需要用户自己建模、计算、分析并得出最后的结论。
在整个产品的研发当中计算机辅助已经成为了其中必不可少的一环,是整个设计过程最先进、最不可或缺的手段,在提高产品设计质量、节约成本、缩短产品上市周期方面越来越显示出了它的重要性。计算机辅助工程的技术种类很多,其中包括有限元法、 边界元法、 有限差分法。每一种方法各有其应用的领域,其中有限元法应用的领域越来越广,现已应用到结构静力学、结构动力学、热力学、流体力学、电磁学等领域,在产品的设计开发中起着及其重要的作用[[10]]。
1.3 本文工作
本次对拖带系统的布置设计是针对150m作业水深钻井平台展开的,主要内容是熟悉拖带系统设计的要求和相关规范、了解拖带系统布置设计应考虑的问题并且掌握拖带系统的特点,进而对拖带系统的布置进行设计并对其结构强度进行校核,对拖带系统中设备和被拖物进行受力分析从而对拖航作业中的拖航阻力进行计算校核。
本文的目标是根据拖带系统的实际工作环境及相关规范、特定要求,制定一个初步设计方案。然后利用规范中的方法进行各系统的受力分析以及计算拖航阻力。最后对拖航系统进行强度校核确保其强度满足规范要求。
第2章 自升式钻井平台与拖带系统
2.1 钻井平台主尺度
自升式钻井平台带有可自由升降的桩腿,在进行作业时,钻井平台可以将其桩腿伸向海底,待桩腿接触到海底后,桩腿继续向下伸,使钻井平台的船壳底部离开水平面,从而有利于钻井平台的工作人员进行水上作业。在拖航时,钻井平台的桩腿向上收回,其船壳接触水面处于漂浮状态后,桩腿继续上升直至离开水面[[11]]。如图2.1.1所示为自升式海洋平台工作原理简图。
由于缺少相关数据,本文采用母型改造法,将招商重工有限公司所建造的自升式钻井平台“海恒CJ-50-1”作为母型平台对其进行缩放,得到150米作业水深的自升式钻井平台,将其作为本次拖带系统设计的对象。
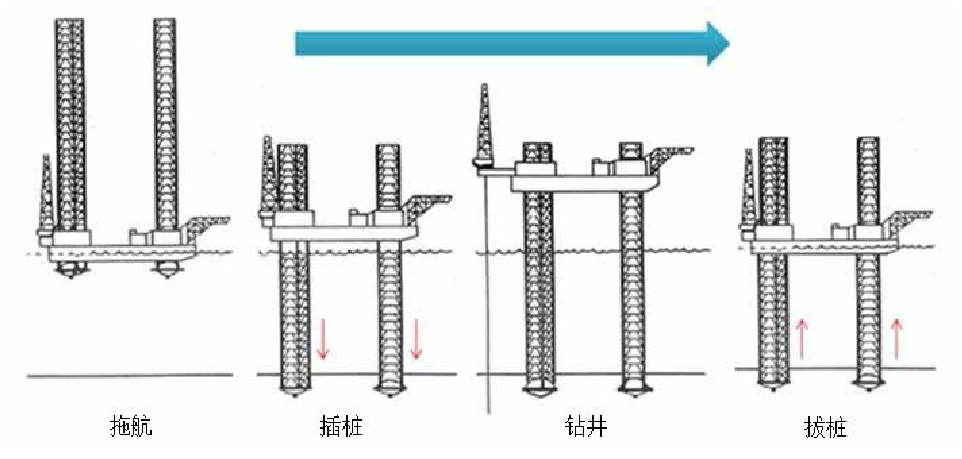
图2.1.1 自升式钻井平台工作原理简图
本次设计的钻井平台拖带系统长度为64米,宽度为60米,型深为9米,设计吃水为4米,舾装完成后桩腿长度为160米。
如表2.1.1所示为该平台的主尺度数据以及在本次计算中所需的主要数据。
表2.1.1 钻井平台拖带系统相关数据
项目 | 数据 | 单位 |
排水量 型深 吃水 桩腿长度 桩腿宽度 船体受风面积 平台长度 平台宽度 | 18432 9 4 160 12 1656 64 60 | t m m m m m2 m m |
2.2 拖带方式
深水钻井平台有许多种移位方式:可以利用其自身配备的推进装置进行自航,可以由拖船进行拖带并同时使用自身配备的推进装置协同进行拖带(混拖),还可以利用半潜船进行干拖。
一般而言,由于深水钻井平台井架较高,除了诸如航行超远距离(10000海里及以上)、航线上无限制高度作业区域或井位富余此类作业窗口较小的特殊情况之外,深水钻井平台的拖带一般选择自航、纯拖或者混拖的方式进行[[12]]。
考虑上述所说的一般情况,本文选择由拖船纯拖的方式对钻井平台进行拖带,并对该拖带系统进行设计。
2.3 拖曳设备
拖曳设备是指为保证拖带作业顺利进行而设于拖船、被拖物或水上漂浮物上供拖带作业使用的专门设备,可分为固定拖曳设备与活动拖曳设备两种。
固定拖曳设备包括拖缆机、拖钩、拖索拱架、拖缆滚筒、拖力眼板、拖柱及拖缆孔等。
活动拖曳设备又称拖索具,包括主拖缆、设备拖缆、应急拖缆、短缆、过桥缆、龙须缆、三角板、卸扣、拖曳环及回收缆等。[[13]]
2.4 拖船的选用
拖船是用于拖带其他船只或浮动建筑物的船舶,具有结构牢固、稳性较好、船身较小、主机功率大、牵引力大、操纵性能良好等特点,自身并不载运货物或旅客,主要用于拖带载运物资的驳船和各种作业船。根据使用航区和功能的不同,拖船可分为远洋拖船、内河拖船、沿海拖船、港内拖船和海洋救援拖船等。根据使用任务的不同,拖船可分为运输型拖船、辅助作业拖船、救助拖船和海洋开发用拖船等。
在本次拖带系统的布置中选用了两种不同的拖船,一种是功率较大的主拖船,另一种是功率较小,主要用于辅助作用的辅助拖船。其中,主拖船主要用于保持拖航作业中前进的方向以及控制拖带作业的转向,辅助拖船则用于帮助主拖船拖带自升式钻井平台平台的前进及转向,并且在平台离港时负责控制平台的缓慢移动。[[14]]
2.4.1 主拖船
由于规范中对拖船大小无明确规定,因此一般根据实际情况进行选择。参考“海恒CJ-50-1”母型平台拖带情况,在本论文中选用16000KW深水多用途海洋工程拖船作为拖带作业的主拖船,如图2.4.1.1所示。该船是一款为深水海域油气资源的勘探和开采提供配套作业服务、具有动力定位功能的多用途海洋工程拖船。主要功能为拖曳大型海上设备,如为半潜式海洋平台提供起、抛锚服务,运输货物,提供消防、救生服务等[[15]]。
该船具有较大的功率,可以作为拖带大型海洋平台进行远距离移动的主拖船。

图2.4.1.1 深水多用途海洋工程拖船
以上是毕业论文大纲或资料介绍,该课题完整毕业论文、开题报告、任务书、程序设计、图纸设计等资料请添加微信获取,微信号:bysjorg。
相关图片展示: