基于反步法的航天器编队系统协同控制毕业论文
2020-04-15 21:01:33
摘 要
航天器编队,指的是将许多正在工作的航天器组合成一个整体,这些航天器本身没有物理上的连接,但可以按照指令,共同构成设定好的编队形状,从而合作完成任务。而对于航天器的编队飞行,姿态协同控制是影响其成功与否的关键因素。
本文首先对航天器编队协同控制问题中涉及到的理论基础进行了介绍,包括航天器的参考坐标系、几种常用的航天器姿态描述法;接着介绍文中将会用到的一些稳定性理论,和航天器编队协同控制的数学模型。然后本文基于反步法,设计了不同情况下的主从式协同控制器。首先设计理想情况下的控制器并进行了仿真,验证其可行性;接着针对航天器转动惯量不确定,并受到时变但有界的扰动,设计了相应的控制器,利用仿真程序,验证控制效果。然后设计了扰动是未知常值情况下的自适应控制器,并进行仿真,验证其是否有效。最后考虑输入受限的情况,设计了利用指令滤波的自适应器,仿真验证了其可行。
关键词:编队飞行 姿态协同 罗德里格参数 反步法 自适应
The Backstepping-based Cooperative Control for Spacecraft Formation System
Abstract
Spacecraft formation flight refers to the formation of many spacecrafts in flight. These spacecrafts do not have physical connections, but they can be combined to form a set formation configuration. For the formation flight of spacecraft, coordination attitude control is the key factor that affects its success.
This paper firstly introduces the basic theories about the spacecraft formation cooperative control problem, including the reference coordinate system and some methods for spacecraft attitude description. Then this paper gives some theories that will be used, including some stability theories and the mathematical model of cooperative control of spacecraft formation. For different conditions, different leader-follower controllers is designed in this paper using the backstepping method. Firstly, the simple controller is designed for the ideal situation, and simulates to verify its feasibility. Then for the uncertainty about the moment of inertia, time-varying and bounded disturbances, this paper designs a backstepping adaptive controller and verified by simulation. Then, for the case that the moment of inertia and disturbance are unknown constant values, the adaptive controller is designed based on the backstepping control method. Finally, considering the problem of limited input, this paper designs a backstep adaptive controller based on instruction filtering and uses the simulation program to verify the validity.
Key Words: Formation flight; Cooperative Control; Modified Rodrigues Parameters (MRP); Backstepping control; Adaptive Control
目 录
摘 要 I
Abstract II
第一章 绪论 1
1.1 研究的背景和意义 1
1.2 航天器编队协同控制概述 2
1.3 姿态协同的研究现状 3
1.4 本文的主要内容 4
第二章 航天器编队协同控制理论基础 5
2.1 引言 5
2.2 参考坐标系 5
2.2.1 地心惯性坐标系 5
2.2.2 航天器本体坐标系 5
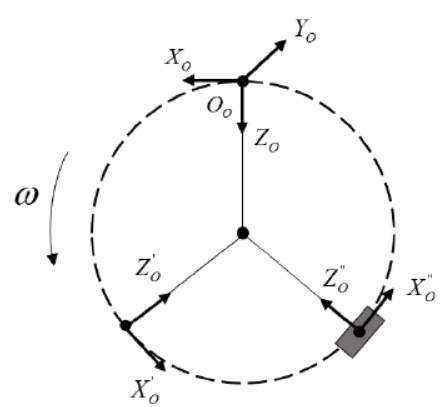
2.2.3 航天器轨道坐标系 6
2.3 姿态描述法 6
2.3.1 方向余弦阵 6
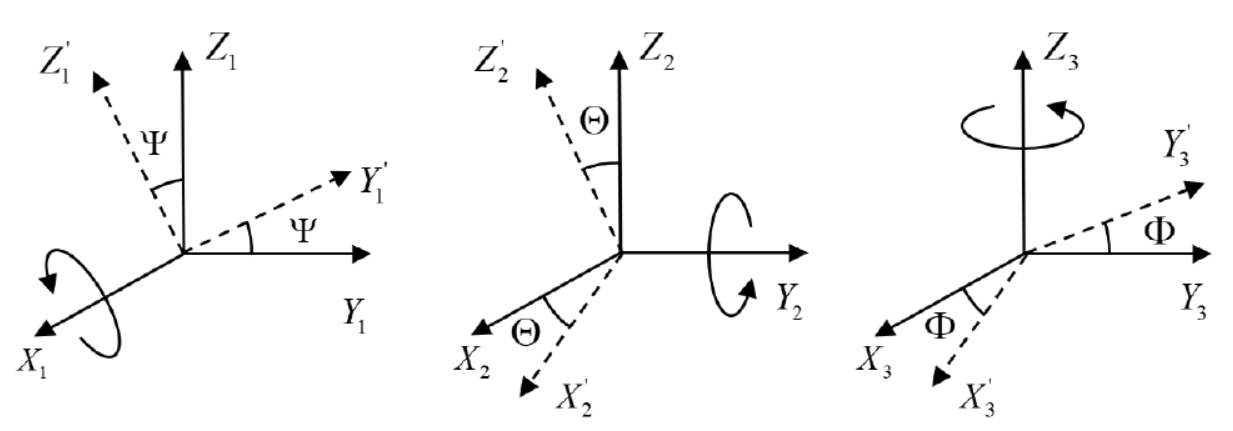
2.3.2 欧拉角 7
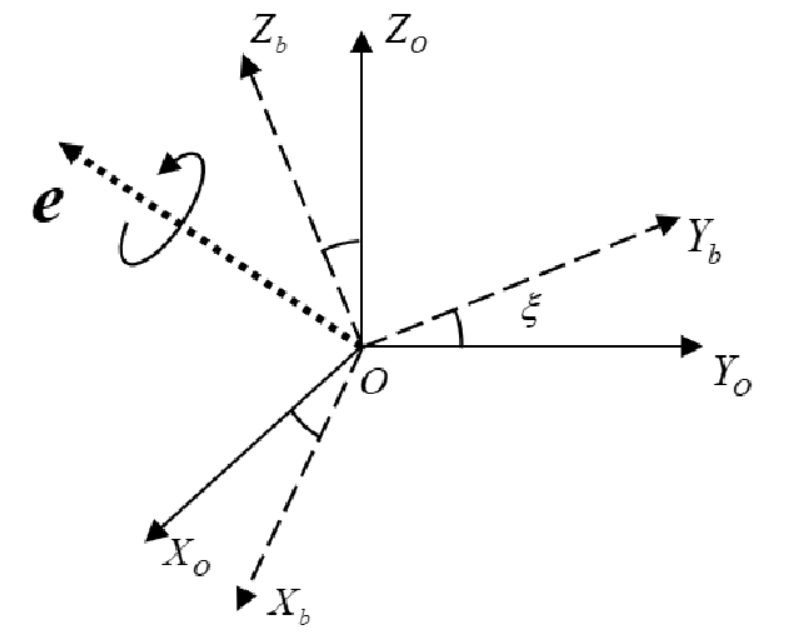
2.3.3 欧拉轴/角 8
2.3.4 四元数 9
2.3.5 修正罗德里格参数 9
2.4 稳定性理论 10
2.4.1 稳定性理论 11
2.4.2 不变集原理 13
2.4.3 引理 13
2.5 姿态动力学和运动学的模型 14
2.5.1 姿态动力学模型的建立 14
2.5.2 姿态运动学模型 15
第三章 基于反步法的航天器编队姿态控制 16
3.1 引言 16
3.2 问题描述 17
3.3 理想情况下的姿态协同控制 17
3.3.1 控制器设计 18
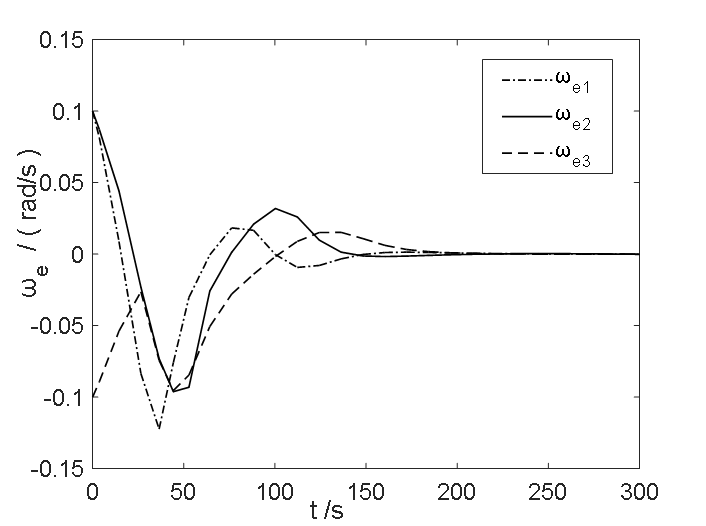
3.3.2 仿真验证 21
3.4 转动惯量不确定,时变扰动可用常值界定的情况 22
3.4.1 控制器设计 22
3.4.2 仿真验证 25
3.5 转动惯量不确定,扰动为未知常值的情况 27
3.5.1 控制器设计 27
3.5.2 仿真验证 29
3.6 输入受限情况下的姿态协同控制 31
3.6.1 控制器设计 31
3.6.2 仿真验证 34
结论 37
参考文献 38
致谢 41
以上是毕业论文大纲或资料介绍,该课题完整毕业论文、开题报告、任务书、程序设计、图纸设计等资料请添加微信获取,微信号:bysjorg。
相关图片展示: