无人电动巴士感知系统设计毕业论文
2020-04-11 17:51:41
无人驾驶电动巴士感知系统设计
学院(系): 国际教育学院
专业班级:车辆工程专业 1402班
学生姓名: 来煜明
指导教师: 黄妙华
学位论文原创性声明
本人郑重声明:所呈交的论文是本人在导师的指导下独立进行研究所取得的研究成果。除了文中特别加以标注引用的内容外,本论文不包括任何其他个人或集体已经发表或撰写的成果作品。本人完全意识到本声明的法律后果由本人承担。
作者签名:
年 月 日
学位论文版权使用授权书
本学位论文作者完全了解学校有关保障、使用学位论文的规定,同意学校保留并向有关学位论文管理部门或机构送交论文的复印件和电子版,允许论文被查阅和借阅。本人授权省级优秀学士论文评选机构将本学位论文的全部或部分内容编入有关数据进行检索,可以采用影印、缩印或扫描等复制手段保存和汇编本学位论文。
本学位论文属于1、保密囗,在 年解密后适用本授权书
2、不保密囗 。
(请在以上相应方框内打“√”)
作者签名: 年 月 日
导师签名: 年 月 日
Abstract
Science and technology to promote economic growth has found a new flash point in recent years, that is, driverless. With the development of computer technology, the accumulation of unmanned technology has approached the stage of commercialization, and the automobile industry has developed toward a more comprehensive and more yuan-based direction.
Like a car that is controlled by a person, an unmanned vehicle needs environmental information in real time. Environmental information can generally be obtained through the following two ways: First, use the on-board sensors to obtain driving environment information through the unmanned vehicle environment perception subsystem, and integrate the sensor information with the environmental information model; second, provide external environmental information through the communication network. For example, the traffic congestion of the front road provided by the car network to the driverless vehicle and the driving tendency of the surrounding vehicles, the situation of traffic lights and the change trend of the intersection traffic sent by the subgrade traffic facilities.
The environment perception subsystem can use the above environmental information and combine the prior environment model to understand and identify the driving environment.
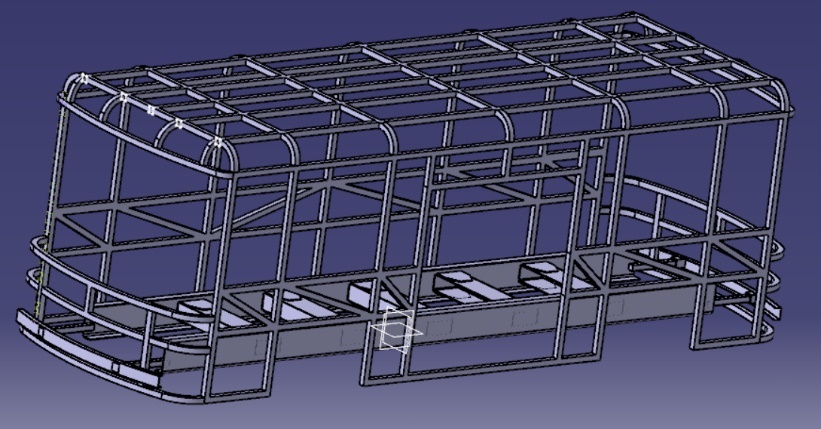
In order to facilitate the installation and removal of the sensor, the connection between the bracket and the frame is bolted. In order not to damage the body frame, it is not possible to directly drill holes in the body frame. Therefore, the aluminum alloy frame was welded on the frame.
Key Words:Keywords: driverless; environmental awareness; sensor installation; bracket design; finite element analysis.
Content
第1章 绪论 5
1.1 选题的目的及意义 5
1.2 国内外现状分析 6
1.3 本文的结构安排及研究方法 7
1.4 本章小结……………………………………………………………………….8
第2章 感知系统方案设计…………………………………………………………..9
2.1 传感器介绍…………………………………………………………………….9
2.1.1 激光雷达…………………………………………………………………..9
2.1.2 视觉传感器………………………………………………………………10
2.1.3 毫米波雷达………………………………………………………………11
2.1.4 超声波雷达………………………………………………………………12
2.1.5 GPS IMU…………………………………………………………………12
2.2 传感器选择…………………………………………………………………13
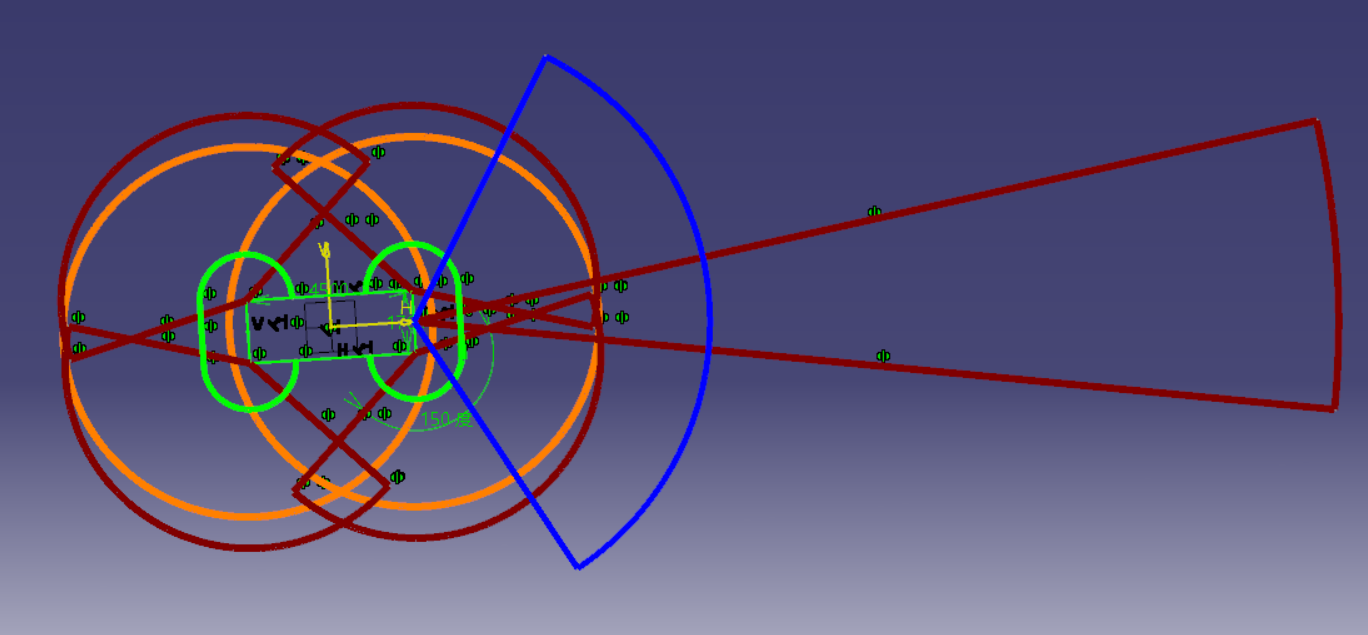
2.3 传感器布置…………………………………………………………………13
2.3.1 超声波传感器安装…………………………………………………….14
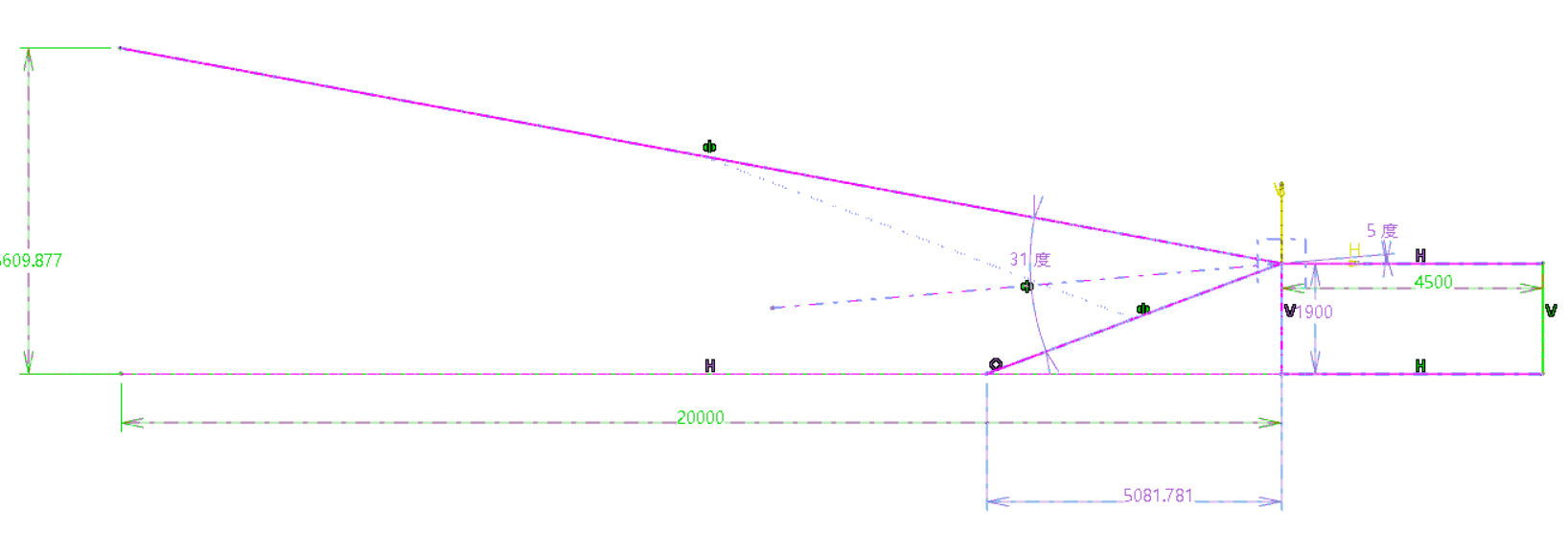
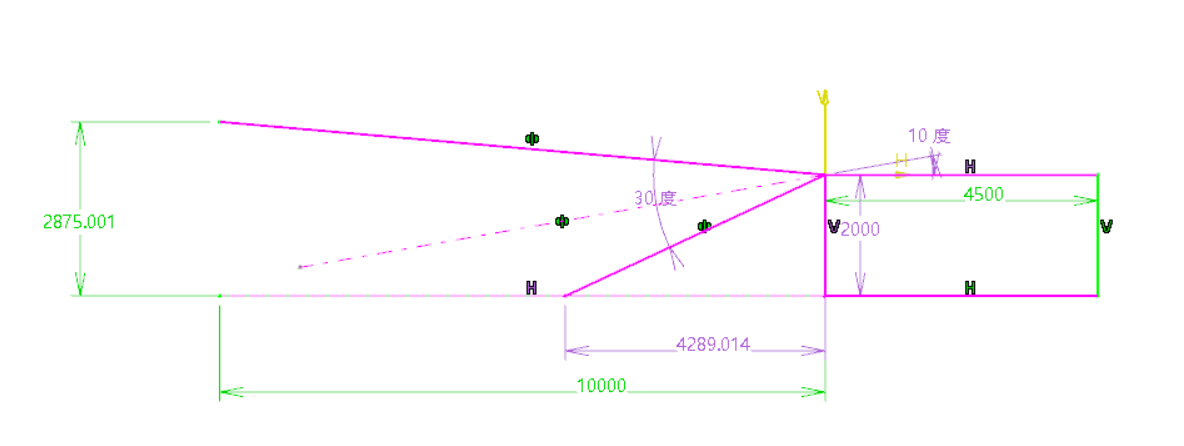
2.3.2 毫米波雷达安装……………………………………………………….14
2.3.3 摄像头和激光雷达安装……………………………………………….15
2.4 感知系统数据处理方案……………………………………………………..16
2.5 本章小结……………………………………………………………………...16
第3章 车载传感器支架设计 17
3.1支架设计方案 17
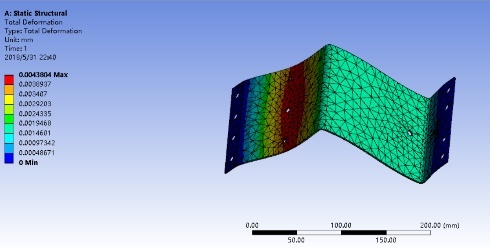
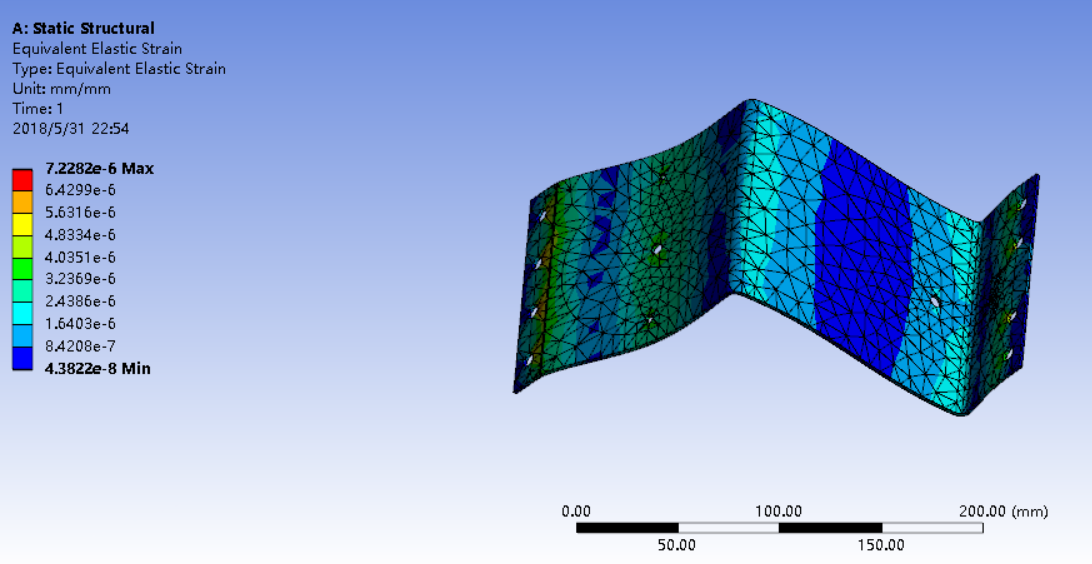
3.2 支架有限元分析 18
3.3 方案对比选择 18
3.4 本章小结
第4章 总结与展望 19
参考文献 20
致谢 21
Chapter 1 Introduction
Science and technology to promote economic growth has found a new flash point in recent years, that is, driverless. With the development of computer technology, the accumulation of unmanned technology has approached the stage of commercialization, and the automobile industry has developed toward a more comprehensive and more yuan-based direction.
1.1 The purpose and significance of the topic
Cars have become an indispensable tool for transportation in modern society. The casualties and property losses caused by car accidents cannot be ignored. According to the data provided by the World Health Organization, 1.24 million people die each year from road accidents worldwide. The existing active safety technology can greatly reduce the accident probability, including collision warning, lane departure warning, collision braking and blind spot monitoring. Unmanned driving can prevent people from being misled by mistakes and greatly reduce traffic accidents.
With the increase in car ownership, many cities become congested and people have to spend a lot of time on the road. Another problem caused by traffic jams is increased emissions from motor vehicles. When the driverless vehicle occupies a large proportion, it can cooperate with the intelligent transportation system to optimize the flow, improve the traffic efficiency, and relieve congestion.
Driverless technology can free people from driving a car and give people more free time. Driverless driving is easier to implement on buses and school buses where such routes are fixed and where the environment is relatively simple.
1.2 Analysis of the status quo at home and abroad
From 2004 to 2007, the United States held three sessions of the darpa unmanned driving challenge. Since 2009, China has held a yearly “China Smart Car Future Challenge”. These drone-related competitions have stimulated research enthusiasm and promoted unmanned driving. The development of technology. At present, driverless perception is mainly divided into two camps: Google-based laser radar and Tesla-based vision sensor.
Form1.1 Domestic and foreign unmanned bus models
Firm | Name | Nation | capacity | Sensors |
Navya | Arma | France | 15 | Lidar,camera,GNSS/RTK,odometry |
Easy Mile | EZ10 | France | 10 | GPS,Lidar,camera |
Oxbotica | GATEway | UK | 8 | Lidar,camera |
Local Motors | Olli | US | 9 | Lidar,camera,radar,IMU,GPS |
青飞智能 | Genius100 | china | Lidar,camera | |
驭势科技 | Uisee | china | Lidar,camera |
The most famous company in the field of driverless buses is French navya company. Navya has so far launched two major products, unmanned buses and unmanned taxis, and has been commercially available in many countries and regions around the world. In the structure of the sensor, navya's unmanned bus uses two 360° multi-line Lidars, six 180° single-line Lidars, one front and rear camera, GNSS/RTK and odometer. Obviously navya's unmanned buses use a laser radar-based sensing method. The unmanned bus sensory system of easy mile, another company belonging to France, is similar to navya.
It is worth mentioning that the British Oxbotica's gateway, using SLAM technology to locate, it did not install GPS.
以上是毕业论文大纲或资料介绍,该课题完整毕业论文、开题报告、任务书、程序设计、图纸设计等资料请添加微信获取,微信号:bysjorg。
相关图片展示: