门机起升机构变频调速电气系统设计毕业论文
2020-04-10 14:43:44
摘 要
门座起重机在港口其起重机械中具有重要地位。只有合理的电气系统的设计才它能够保证它在安全生产的前提下尽量提高工作效率的情况下。本次设计针对MQ4035的起升机构的调速控制系统,采用变频调速结合PLC的总体方案,完成了起升操作模式制定、电气元件的选型、电气线路的详细设计、PLC梯形图设计与编程、最后进行了PLC程序的仿真。所设计的控制系统采用西门子系列PLC,变频器采用港迪HF500-160-4,并据此设计了完整的PLC的软件部分,包括I/O点的分配、绘制PLC输入输出电路图纸、编制PLC梯形图等。使用编程软件完成了PLC程序的调试,证明所设计的起升机构电气系统是合理的。
关键词:门座起重机;变频调速;PLC;起升机构
Abstract
The portal crane has an important position in the cranes in the port. Only the design of a reasonable electrical system can ensure that it can maximize its work efficiency under the premise of safe production. The design of the speed control system for the hoisting mechanism of the MQ4035 adopts the overall scheme of variable frequency speed control combined with PLC,.I complete the establishment of lifting operation mode, the selection of electrical components, the detailed design of electrical circuits, the design of PLC ladder diagrams and programming, and the simulation of the PLC program. The designed control system adopts Siemens series PLC, and the frequency converter adopts Hongdi HF500-160-4. According to this, the complete software part of PLC is designed, including the distribution of I/O points, the drawing of PLC input and output circuit, and the preparation of PLC. Ladder diagram and so on. The use of programming software to complete the debugging of the PLC program proves that the designed lifting mechanism electrical system is reasonable.
Key Words:Portal Crane;Frequency;PLC;Lifting mechanism
目录
第一章 绪论 1
1.1 研究背景 1
1.2 发展现状及趋势 1
第二章 门座起重机概述 2
2.1 门座起重机简介 2
2.2 门座起重机的基本机构 2
2.2.1 起升机构 2
2.2.2 回转机构 2
2.2.3 变幅机构 3
2.2.4 运行机构 3
2.3 门机起升机构电气控制分析 3
2.3.1 起升机构的控制要求 3
2.3.2 起升机构的动作过程 4
2.3.3 起升机构的保护装置 5
第三章 变频调速系统的原理 5
3.1 交流异步电动机调速原理 5
3.1.1 变极调速 6
3.1.2 变转差率调速 6
3.1.3 变频调速 6
3.2 变频控制技术 7
3.2.1 v/f控制(标量控制) 7
3.2.2 矢量控制 8
第四章 门座起重机起升机构电气控制系统设计 8
4.1 电气传动方案的选择 8
4.2 变频调速的优点 9
4.3 元件选型 10
4.3.1 电源选择 10
4.3.2 电机、变频器及制动电阻选择 12
4.4 电气控制系统的设计 14
4.4.1变频器的主回路 14
4.4.2 变频器的控制回路 14
4.4.3 变频器的主要元器件 15
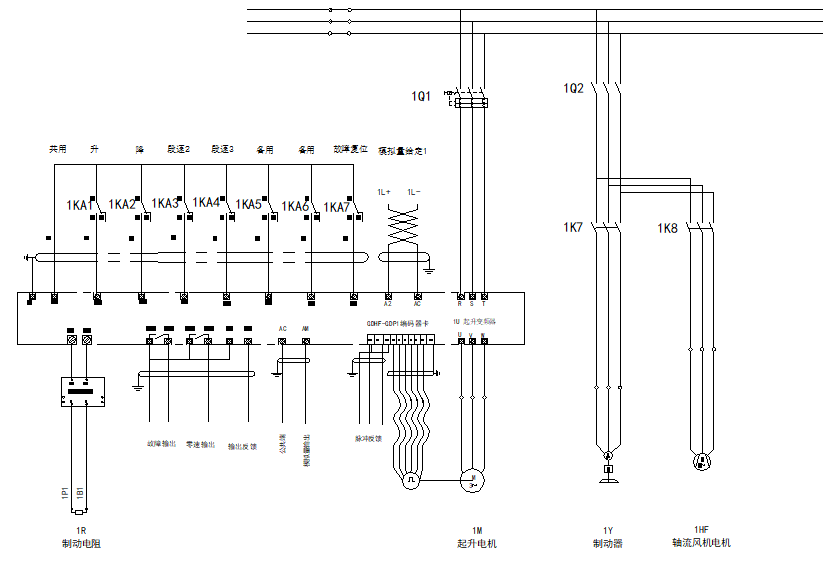
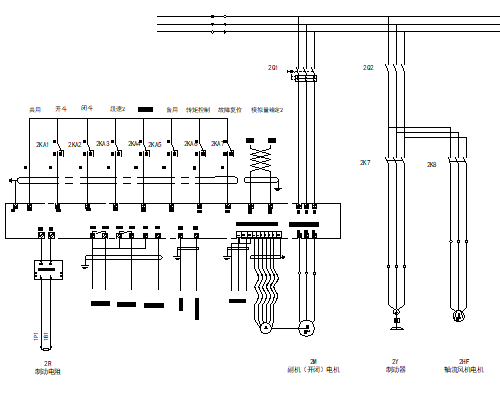
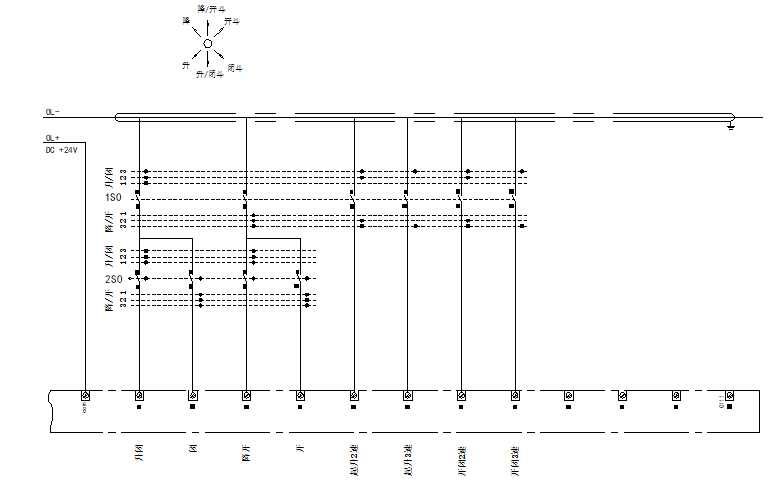
4.4.4 电路图 16
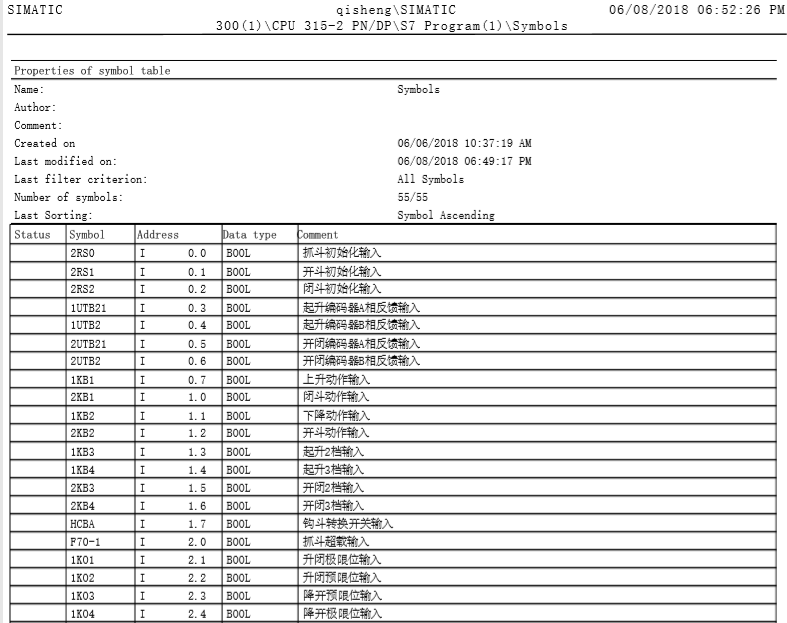
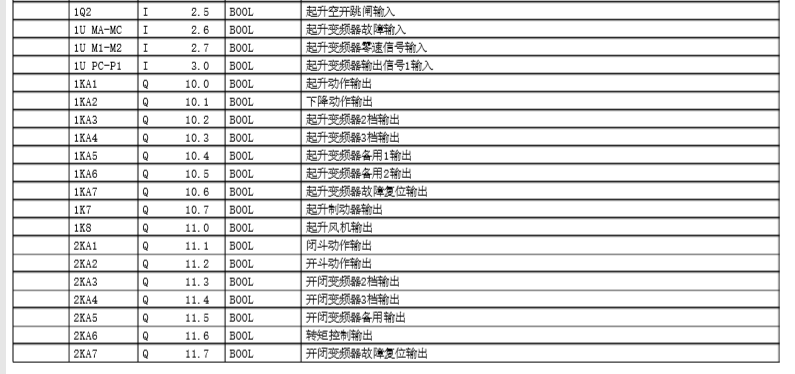
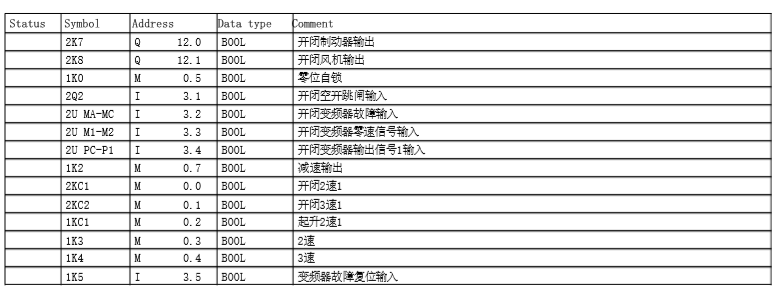
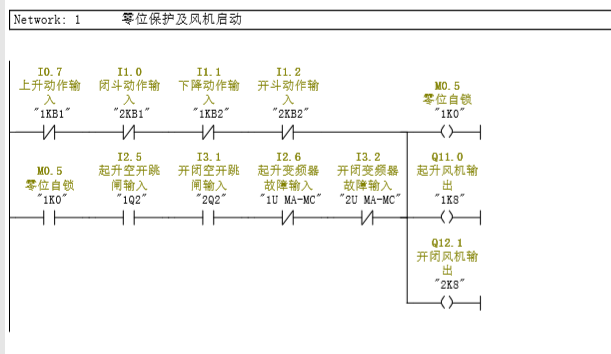
4.4.5 PLC控制系统设计 18
第五章 系统程序仿真 27
第六章 结论 30
参考文献 31
致 谢 32
第一章 绪论
1.1 研究背景
自古港口便是国家发展的重要动力之一,以港兴市的例子不胜枚举。随着经济全球化的深入和深海贸易的发展,港口在国民经济发展中发挥着越来越重要的作用。而门座起重机有着良好的工作性能,适用范围大,使用数量在港口机械中最多,它也是机构最多,结构最复杂的装卸机械。门座起重机的工作原理是通过起升、变幅、回转三个运动的配组合,实现物体的上升、下降和移动,从而完成装卸。
我们需要它能够在保证安全生产,尽量提高工作效率的情况下,在各种不同的场合按照需求的速度进行工作,同时,随着港口运输的发展,为迎合门机大型化、高效化的发展趋势。因此,需要一种更可靠、快捷、安全的调速方案。
1.2 发展现状及趋势
作为使用最普遍的港口机械,门座起重机的发展从未停下脚步。而随着时代的发展,对门机也必然有了更高的要求。门机的电气传动系统经历了以下发展阶段:直流发电机- --电动机(G-M);晶闸管- -直流电动机(SCR-M)直流电动机调速系统和异步电动机变极调速;线绕式异步电动机的串电阻调速;调压调速;转差电动机调速;串级调速的发展过程。因为直流电动机有换向器和电刷的缘故,价格昂贵,维护保养不易,容量上也有限制。而其他几种异步电机调速也存在各种弊端,比如,调速的范围小,能耗高,功率因数低,不能在大功率中运用等。
交流异步电机变频调速是目前交流电动机最理想的调速方案。可在整个调速范围内进行连续控制,精度高,平滑性好。有恒转矩和恒功率控制控制性能,对负载突变的反应非常好。系统功率因数接近1.0,对前级电源的容量配置要求低,且谐波等电网危害小,力能指标远超过其他方式。
目前,大多门座起重机乃至各港口机械多采用变频调速,但这项技术仍存在各种缺陷,比如,因为起升机构的位能负载特性和使用安全性的需求,要求变频器需要具有更优性能。但可以确定的是,在未来很长一段时间内,变频调速会一直是起重机调速方案的最优选择。而更深入的研究矢量变频控制技术,具有非常重要的意义。
第二章 门座起重机概述
2.1 门座起重机简介
门座起重机是一种典型的旋转类型的有轨式起重机,被广泛运用于港口、码头、造船及水电站建设等大型工程中。
它的结构包括大拉杆、小拉杆、人字架、象鼻梁、门架、旋转平台、驾驶室等。它其机构包括起升机构、回转机构、变幅机构和运行机构。电气部分通常由通过电缆卷筒或地沟划线供电,采用电力直接驱动,通常包括电线电缆、中心集电器、电动机、变压器、电阻器、控制柜、操纵台、照明等。
门座起重机有四连杆组合臂架式门座起重机和单臂架式门座起重机之分。前者的最大优点是臂架下面的净空高度较大,因而在一定的起升高度要求下,起重机的总高度较小,但其结构复杂,重量大,而单臂则与之相反。目前,国内大多门机采用四连杆组合臂架式起重机。
2.2 门座起重机的基本机构
2.2.1 起升机构
起升机构是门座起重机最重要的机构。它的主要任务是:从地面提升货物或将停滞在空中的货物放到地面,并配合其他工作机构实现货物的移动,完成装卸工作;按照不同的速度升降货物;当需要货物在空中停滞时,可在起升或下降的过程中制动,以完成目的;当停电时,使货物停滞在空中;电源恢复后,货物不自由运动,并能在操作下继续完成起升或下降货物的工作。其工作原理是:卷筒上缠有钢丝绳,钢丝绳通过滑轮与货物接触,减速器的低速轴带动卷筒,使得钢丝绳的卷入或放出实现货物的上升或下降。依靠制动器使吊具及货物滞空。依靠电机的正反转来控制吊具的升降。
2.2.2 回转机构
回转机构的作用是使货物绕旋转中心做回转运动,从而使货物运达平面内指定位置,与其他机构配合可将货物送至幅度范围内任意空间位置,同时,它也起到支撑旋转部分重量的作用。
2.2.3 变幅机构
在门座起重机中,从取物装置中心线到起重机回转中心线之间的距离成称为起重机的幅度,而改变起重机幅度的机构便是变幅机构。它的主要任务是:通过改变幅度从而改变吊具位置,以达到准确起吊货物,调整起重能力及起重路线的目的;调整起重机的工作范围,在起升机构和回转机构的配合下,形成一个全方位无死角的环形工作空间,从而提高工作效率,节约时间,改善工作性能。
2.2.4 运行机构
起重机的工作地点并不是恒定不变的,运行机构的作用便在于使起重机在一定距离内进行水平位移,从而改变起重机的工作位置,扩大工作范围,提高装卸效率。根据结构特点,运行机构可分为有轨运行机构和无轨运行机构。大多门座起重机运行机构为有轨运行机构。有轨运行机构车轮及铺设的钢轨均为钢铁材质,运行阻力小,承载能力强,尽管受到移动距离和轨道的限制,但瑕不掩瑜,仍受到广泛使用。
2.3 门机起升机构电气控制分析
2.3.1 起升机构的控制要求
起升机构的作用在于起升和下降货物,需要它能按需求完成工作,并在安全的前提下尽可能提高效率。它需要满足以下几个要求。
(1)起升机构能够从地面升起货物和降落货物;
(2)根据货物的具体起升情况,能够使用不同的速度进行起升和下降工作;
(3)当对货物进行起升时,能将货物送至指定的位置并能在该位置及时停车,而且能让货物在该位置保持;
(4)当起升机构电气控制系统任一位置发生故障或突然断电,能使货物停留在发生故障前或断电前的位置,不能因为失去支持力而让货物在重力作用下急速下降;
(5)档故障解决或来电后,必须在各主令开关复位之后再重新给定操作命令,起升机构按照新的指令动作,而不能按照故障或停电前的指令运行。这防止了起重机在无人操作的情况下运行。
2.3.2 起升机构的动作过程
门座起重机起升机构有吊钩和抓斗两种取物装置,它在使用不同的取物装置时完成的功能是不相同的,控制过程中对电气系统的要求也不相同,所以使用不同的取物装置的时侯需要切换到不同的工作模式。起起升机构设计有吊钩和抓斗两种工作模式,通过操作联动台上的钩斗、转换开关完成工作模式的切换。两种模式的具体控制如下:
吊钩模式
吊钩模式下,起升机构电气系统完成吊钩的起升和下降,在起升和下降的过程中主升(起升)电机和副升(开闭)电机按照同样的速度同时起升和下降,可以通过调节手柄的幅度改变起升和下降的速度,离手柄的零位越远其速度越快。
抓斗模式
抓斗主要用于装卸散料,特殊形式的抓斗也用来装卸原木、生铁等物料。通过起升绳和开闭绳间的相互配合来改变颚板的位置从而实现抓斗的起升和开闭动作。
对抓斗的控制都是通过操作联动台的右手手柄来完成的,抓斗主要的工作状态如下:
(1)起升、下降
操作手柄将手柄打到起升或下降位置,PLC接收来自于主令控制器的信号通过内部程序运算输出信号控制起升和开闭两台电机以相同的速度同时正转或反转。
(2)闭斗、开斗
开闭电机正反转带动开闭绳提升或下降,改变起升绳和开闭绳的相对位置从而实现抓斗的开闭。当操作手柄处于闭斗或开斗位置时,起升电机断电停车,通过机械抱闸保持起升绳的位置不变,开闭电机动作改变抓斗的状态。开闭电机正转,开闭绳相对于起升绳向上提升,抓斗闭合;开闭电机反转,开闭绳相对于起升绳下降,抓斗打开。
(3)降开
顾名思义,在抓斗下降的过程同时需要打开抓斗。起升绳和开闭绳都下降,为了改变起升绳和开闭绳的相对位置实现开斗动作,开闭绳的速度应大于起升绳。当操作手柄打到降开位置时,起升电机和开闭电机同时反转且开闭电机的速度比起升电机的速度快一档。
(4)升闭
升闭过程原理与降开类似。操作手柄打到升闭位置时,起升绳和开闭绳同时提升,开闭电机速度比起升电机速度更快。
2.3.3 起升机构的保护装置
电机过热会损坏电机和电缆,故应在电机主电路设置过电流保护。为保证起升机构运行在起重机所允许的范围之内,应设置两级限位保护开关,碰撞到第一级限位保护开关即到达起升和下降预限位的时候,机构自动进行减速,以低速运行;碰撞到第二级限位保护开关即到达起升和下降极限位的时候,机构会立即停止,且只能进行与其运行方向相反的操作。抓斗开斗超过极限位时,开闭绳继续下降,使开闭绳松弛甚至脱离滑轮;闭斗超过极限位时,开闭绳继续提升,加大开闭绳的受力导致开闭绳断裂。所以开闭斗也需要设置两级限位保护开关,即开闭预限位和开闭极限位,其控制与起升限位开关相似。另外,变频器带有灵敏度及可靠性高的电子保护装置,一旦出现致命故障能自动封锁输出,并记录和显示各种故障的代码,便于检修。同时,各机构有急停开关,避免突然出现故障时使系统停止,避免损坏设备。
第三章 变频调速系统的原理
3.1 交流异步电动机调速原理
异步电动机的转速计算公式如下:
式中:n---电动机的转速,单位为r/min;
p---电动机极对数;
----供电电源频率,单位为Hz;
s---异步电动机的转差率。
根据上述公式可以看出,改变电机转速的方法有三种,它可以通过改变频率,改变转差率和改变极对数的方法来实现。电源频率和转速成正比,保证其他参数不变的情况下改变电源频率就可以做到改变电机转速
3.1.1 变极调速
变极调速就是通过改变电机绕组的级数来改变电动机转速的调速方法,这种方式调速只能使转速成倍的改变,并不能连续的变化。变极调速的基本原理是在电源的频率没有改变的情况下,转速和电机极对数成反比,只要通过改变异步电动机的绕组的接线方式,就能改变绕组的极对数从而达到改变电动机的转速的目的。同理,对于异步电动机而言,通过改变定子绕组的接线方式,可以改变极对数,从而改变异步电动机的转速。变极调速电动机往往是双速和三速。
3.1.2 变转差率调速
变转差率调速可分为变压调速、串电阻调速、串级调速。
变压调速是通过改变定子电压来改变电机的机械特性,从而达到调速的目的,电压的调节靠通过改变晶闸管的触角来实现。由于这种调速方法损耗很大,所以只能用在小容量的电机上。
串电阻调速是绕线式异步电动机釆用转子回路串电阻的方式来进行调速,调速电阻接线方式和起动时一致,区别在于起动电阻只在短时间内工作,而调速电阻一直处在工作状态。由于该方法在电阻部分的损耗很大,导致效率降低,所以应用较少。
串级调速把消耗在电阻上的转差功率反馈到电网做到,从而提高调速的运行效率,通过在增加转子电路上附加电势,使得频率和转子感应电势频率相同。电气串级调速的基本原理是在绕线转子异步电动机转子侧采用二极管或晶闸管整流桥,将转差频率交流电变为直流电,然后由可控逆变器获得可调直流电压作为调速所需的附加直流电动势,将转差功率变换为机械能并加以利用或使其反馈回电网。这是一种节能调速方式,适用于大功率风机、泵等传动电机。
3.1.3 变频调速
顾名思义,变频调速就是通过改变电机的电源频率以达到改变电机转速的目的的调速方法。它的工作原理基于转速和频率的变化特性,该调速方法具有良好的稳定性,控制也较为方便。正因如此,所以用变频器来控制电机调速的控制方式越来越受到人们的青睐。通过对异步电动机参数的研究,根据电动机的参数来设定变频器的规格参数使两者配合更简单方便,也使得其应用越来越广泛。由于变频器通用性好,可广泛应用于笼形异步电动机的调速控制,既使用方便,又能保障经济效益。对异步电动机进行调速控制通常是在电机的磁通不变的状态下进行的,磁通的变化对电机工作有着直接的影响,如果磁通较小,会降低电动机的带负载能力。相反,如果磁通过大,又会影响电动机的输出波形变坏进而影响设备。
在保证磁通不变的前提下依靠改变频率来改变电机转速,可有两种方法可以来实现调速操作,它们分别是在基频以下通过恒定磁通进行变频调速以及在基频以上通过弱磁进行变频调速。只有让主磁通保持恒定不变才能保证电动机的负载能力,电源频率的减少会使感得应电动势也减少,要保证电动机的电动势和频率之比一直保持不变,这就是恒定磁通的变频调速方法的意义所在,这种调速方法是属于恒转矩调速。由于电动机的电动势并不容易检测和加以控制,我们可以就凭借定子电压来提供该项参数,这是因为二者在数值上是近似相等的,这也意味着只要使定子电压与频率的比值保持恒定不变就可以实现调速。基频以上的调速是发生在频率超过额定频率后的情况,这时候的电压已经达到了额定电压,不能再继续提高,只能维持在此状态,这就无法保证磁通不变,当频率不断增加时,势必会导致磁通的不断减小,这种情况就是在弱磁的状态下进恒定功率行调速。
究竟选择这两种调速方式中的哪一种,可以根据它们的自身的特点进行选择。它们各自不同的特点注定了它们适用同的设备不同。电压和频率比值保持不变的调速方法可以用在对调速要求不是很高的设场合,因为转速减小转矩也会渐渐减少的设备也适用于此方法,例如水泵等等。而对升降设备要选用在调速范围较大的区间也能保证活动转矩的调速方式。
3.2 变频控制技术
3.2.1 v/f控制(标量控制)
V/F控制模式就是根据电压和频率之间的关系来控制变频器频率和电压,也叫VVVF(variable voltage variable frequency 可变电压可变邻率)控制方式。它是开环速度控制,不需要速度传感器,控制电路较为简单,经济实惠,因而被广泛使用。但它也存在性能不佳的缺陷。
3.2.2 矢量控制
矢量控制的基本原理如下:通过测量和控制异步电动机定子的电流矢量,根据磁场定向原理分别控制异步电动机的励磁电流和转矩电流,从而控制异步电动机的转矩。异步电动机的定子电流矢量可分解为产生磁场的电流分量 (励磁电流) 以及产生转矩的电流分量 (转矩电流), 对它们进行控制,且同时控制两个分量的幅值及相位,即控制定子电流矢量,因此把这种控制方式称为矢量控制。也就是说,矢量控制就是解耦磁链与转矩,有助于分别设计两者的调节器,从而实现对交流电机的高性能调速。现有的矢量控制方式有基于转差频率控制的矢量控制方式、无位置传感器的矢量控制方式和带有位置传感器的矢量控制方式。这样一来,三相异步电机就可以当做直流电机来控制,从而获得与直流调速系统同样的静态和动态性能。
标量控制和矢量控制的主要区别在于标量控制控制电机电流的大小,而矢量控制控制电机电流的大小的同时,也控制电机电流的相位。
以上是毕业论文大纲或资料介绍,该课题完整毕业论文、开题报告、任务书、程序设计、图纸设计等资料请添加微信获取,微信号:bysjorg。
相关图片展示: