智能辅助驾驶的行人检测与跟踪算法研究毕业论文
2020-04-08 13:26:03
摘 要
随着经济的高速发展,社会城市化的发展也日趋快速,城市化的高速发展为生活带来诸多便利的同时也带来了相应的问题。其中最为突出并且日益严重的一个问题就是交通压力剧增造成的交通事故频发。将基于机器视觉的行人检测与跟踪应用到智能辅助驾驶系统中是目前智能交通系统研究的一大热点,这一研究项目的实现可以帮助驾驶员分析周围行人情况并对突发状况做出警报,有利于减小交通事故中人车事故的发生概率。因此对行人检测与跟踪算法进行研究并将其应用到智能辅助驾驶系统中具有非常重要的实际意义。
本文主要研究的内容是基于机器学习的行人检测算法,相关滤波跟踪算法以及在行人检测算法的基础上实现行人实时跟踪。基于机器学习的行人检测算法研究中包括Hog Svm行人检测算法、boost级联检测算法和基于轮廓线索的C4行人检测算法。Hog Svm行人检测算法中主要分析了Hog特征提取过程,线性Svm分类器的训练以及算法测试结果分析。Boost级联检测算法中主要研究了Boosting中的代表算法Adaboost,研究了级联分类器的训练过程并对Haar Adaboost行人检测做了测试。基于轮廓线索的C4行人检测算法研究是本次检测算法的研究重点,分别介绍了centrist描述符的提出,sobel图和积分图的计算快速检测过程。在之后的检测算法比较中它具有明显的优越性。相关滤波算法的研究选择KCF跟踪算法,介绍了KCF跟踪算法的视觉基础与跟踪原理,并在OTB-100数据集上对其进行性能测试。在行人检测和跟踪算法实现中,本文主要提出了检测与跟踪的整体融合方案,将KCF单目标跟踪扩展为多目标跟踪的思路以及本文中跟踪置信度的计算。最后,用Qt Creator界面开发工具和Opencv计算机视觉库构建了行人检测与跟踪系统,并做出测试。
综上,本文主要通过先分别研究行人检测与行人跟踪,分析对比后选择出性能较优的检测算法和跟踪算法。然后设计方案将检测和跟踪算法融合,从而实现对行人的多目标检测与跟踪功能。并且借助QT平台实现行人检测与跟踪的上位机软件。
关键字:基于轮廓线索的行人检测算法、KCF行人跟踪算法、检测与跟踪算法融合、多目标跟踪、Qt
Abstract
With the rapid development of economy, the development of urbanization is also getting faster and faster. The rapid development of urbanization has brought many conveniences to our lives and also brought us many problems. One of the most prominent and growing problems is the frequent traffic accidents caused by the increase in traffic pressure. The application of machine vision-based pedestrian detection and tracking to intelligent assisted driving systems is a hot topic in the research of intelligent transportation systems. This application can help drivers analyze the situation of surrounding pedestrians and alert them to unexpected situations, which helps to reduce The probability of human and vehicle accidents in traffic accidents. Therefore, it is of great practical significance to study pedestrian detection and tracking algorithms and apply them to intelligent driver assistance systems.
The main research contents of this dissertation are the pedestrian detection algorithm based on machine learning, the related filter tracking algorithm and the real-time pedestrian tracking based on the pedestrian detection algorithm. Pedestrian detection algorithms based on machine learning include Hog Svm pedestrian detection algorithm, boost cascade detection algorithm, and contour cues-based C4 pedestrian detection algorithm. The Hog Svm pedestrian detection algorithm mainly analyzes the Hog feature extraction process, the linear Svm classifier training and the algorithm test results analysis. The Boost cascade detection algorithm mainly studies the representative algorithm Adaboost in Boosting. The training process of the cascaded classifier is studied and the Haar Adaboost pedestrian detection is tested. The research on the C4 pedestrian detection algorithm based on contour clues is the focus of this detection algorithm. The introduction of the centrist descriptor, the rapid computation of the sobel map and the integration graph are introduced. It has obvious advantages in comparison with later detection algorithms. The research of correlation filtering algorithm chooses KCF tracking algorithm, introduces the visual basis and tracking principle of KCF tracking algorithm, and tests its performance on OTB-100 data set. In the implementation of pedestrian detection and tracking algorithms, this paper proposes the overall integration scheme of detection and tracking, expands KCF single-target tracking to multi-target tracking and the calculation of tracking confidence in this paper. Finally, a pedestrian detection and tracking system was built using the Qt Creator interface development tool and the Opencv computer vision library and tested.
In summary, this paper mainly studies the pedestrian detection and pedestrian tracking separately, and analyzes and compares the selected detection algorithm and tracking algorithm. Then the design scheme fuses the detection and tracking algorithms to achieve multi-target detection and tracking for pedestrians. And using the QT platform to achieve pedestrian detection and tracking PC software.
Keywords: Pyramid-based pedestrian detection algorithm, KCF pedestrian tracking algorithm, detection and tracking algorithm fusion, multi-target tracking, Qt
目录
摘 要 I
Abstract II
第1章 绪论 1
1.1 课题研究的背景与意义 1
1.1.1 课题研究的背景 1
1.1.2 课题研究的意义 1
1.2 国内外研究现状 2
1.2.1 行人检测国内外研究现状 2
1.2.2 目标跟踪国内外研究现状 2
1.3 本文主要研究内容与结构安排 3
1.3.1 主要研究内容 3
1.3.2 结构安排 3
第2章 智能辅助驾驶中的行人检测算法研究 5
2.1 基于机器学习的行人检测算法 5
2.1.1 HOG SVM行人检测算法 5
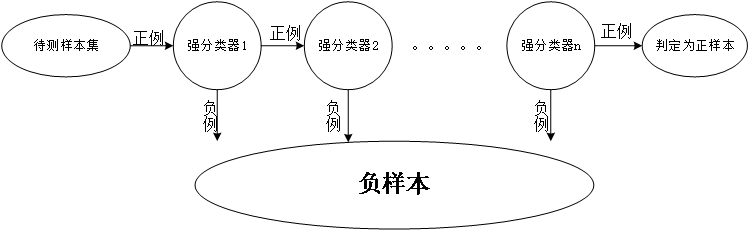
2.1.2 boost级联检测算法 7
2.1.3基于轮廓线索的行人检测算法 9
2.1.4检测算法优选 10
2.2 基于轮廓线索的行人检测算法 11
2.2.1 centrist描述符 11
2.2.2 sobel图像和积分图像的计算 11
2.2.3两级SVM快速检测 13
2.3 实验分析与比较 14
2.3.1 行人检测数据集 14
2.3.2 评价指标 15
2.3.3 测试结果与分析 15
2.4 本章小结 16
第3章 智能辅助驾驶中的行人跟踪算法研究 17
3.1 相关滤波跟踪算法 17
3.2 KCF跟踪算法中的视觉基础 17
3.2.1 FHOG特征 17
3.2.2 岭回归 18
3.3 KCF跟踪算法原理 19
3.3.1 循环矩阵构建正负样本 19
3.3.2 线性回归模型 21
3.3.3 非线性回归模型 22
3.3.4 KCF跟踪算法的流程 24
3.4 实验分析与比较 25
3.4.1目标跟踪数据集 25
3.4.2 评价指标 25
3.4.3 测试结果与分析 25
3.5 本章小结 26
第4章 智能辅助驾驶中的行人检测与跟踪算法实现 27
4.1 系统软硬件平台的搭建 27
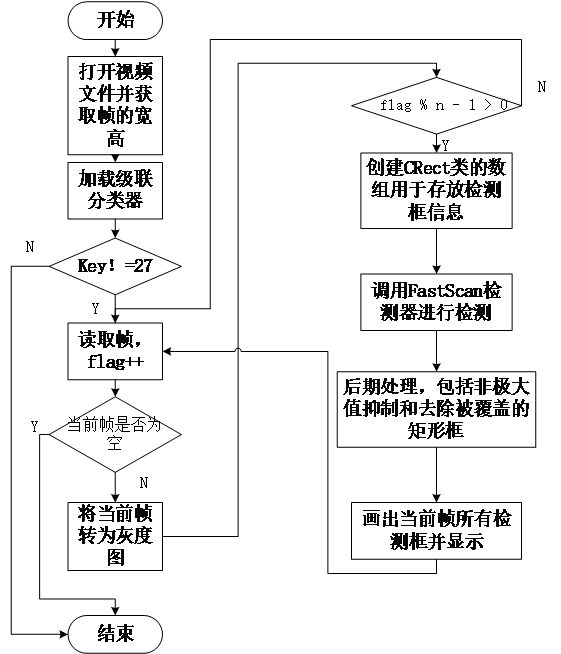
4.2 隔帧检测研究 27
4.2.1 原理分析 27
4.2.2 实验对比 27
4.3 检测与跟踪算法融合 28
4.3.1 算法融合整体方案 28
4.3.2 多目标跟踪 29
4.3.3 跟踪置信度 30
4.3.4 实验结果与分析 31
4.4 基于Qt平台的系统实现 32
4.4.1系统整体框架 32
4.4.2系统功能测试 33
4.5本章小结 33
第5章 总结与展望 35
5.1 工作总结 35
5.2 对未来的展望 35
参考文献 37
致 谢 38
第1章 绪论
1.1 课题研究的背景与意义
1.1.1 课题研究的背景
在信息化高速发展的当今社会,几乎所有领域都离不开计算机的辅助。计算机的智能辅助功能成为了提高社会工作效率和人们生活水平的一大助力,这使得智能计算机的研究领域前景十分广阔,而作为计算机眼睛的计算机视觉自然就具有十分重要的研究价值。同时,随着城市的高度化发展,汽车走进了千家万户,城市的交通压力与日俱增,频繁发生的交通事故夺取了无数人们生命财产安全。为了减少这些事故的发生,已经有不少研究人员将计算机的辅助功能加入车辆中,用计算机智能视觉辅助驾驶员来减少交通事故发生的频率。
本文研究的课题就是通过计算机智能视觉检测并跟踪行人,将此技术应用于辅助驾驶员驾驶中便可以有效减少交通事故中人车事故的发生。此外,有不少公司开始或者已经完成了无人驾驶车辆的设计与生产,而无人车在对周围路况分析的过程中就包括对周围行人的检测与跟踪。已经有越来越多的社会发展必然性证明了智能辅助驾驶中行人检测与跟踪这一课题的研究是具有一定意义的。
1.1.2 课题研究的意义
行人检测与跟踪技术作为保障行人安全的一种安全手段, 在智能车领域的应用越来越受到人们的关注。基于它在智能辅助驾驶系统中可以有效的辅助驾驶员了解行车情况,判断并给出附近行人的位置,对有可能发生的行人交通事故提前预警,从而提降低了事故发生率,一定程度上保障了行车安全。所以它已成为产业界和研究界争相关注的研究热点。尤其是在复杂多变的城市交通环境中,行人检测与跟踪技术能够及时告知驾驶员行人的位置从而避免由于驾驶员视角缺失而发生的事故,这种技术有效的降低了交通事故的发生,为驾驶员和行人双方都提供了更好的安全保障。
同时,在无人车技术中,行人检测与跟踪车辆分析路况的要素之一。无人车技术的实现可以让车辆单独完成各种运输任务,节省大量人力和时间,并且在危险地段的行驶可以通过让无人车完成来保证驾驶员的安全。作为无人车技术中必不可少的行人检测与跟踪算法的研究就具有了相当的意义。
以上社会发展问题与新技术实现都证明行人检测与跟踪技术应用到智能驾驶系统具有相当的社会经济效益与研究意义。
1.2 国内外研究现状
1.2.1 行人检测国内外研究现状
目前,在大量外国文献中都能看对行人检测算法的研究。由美国麻省理工学院的 M.Oren 与 C.Papageorgiou提出的Haar小波在行人检测具有准确且快速的检测特点。Haar 小波模板经常被用来检测形状简单的物体,在其提出后被广泛的用于对物体的检测。Haar算法在其提出时就因其在行人检测中快速的特点被视为经典行人检测算法之一。法国的Navneet Dalal 和 Bill Triggs在其提出Hog特征[1]的论文中初步提出行人轮廓信息是行人检测的重点。因此,他们提出了梯度方向直方图(Hog),并通过具体实验证明了Hog特征的确在对行人的描述上强于很多其他算法。同时在 INRIA数据集[2]上进行了验证,展现出了高检测正确率。伊利诺伊大学的 Niebles.J.C等人,在boost级联检测的基础上提出了一种Adaboost的检测算法,基于级联检测器的快速检测和高准确率,Adaboost行人检测算法也有良好的速度和检测率。
行人检测算法的研究在国内也是十分火热,中科院的孙庆杰等人通过对侧影的人体模型及其对应的概率建立模型,提出将人体用矩形拟合表达的行人检测算法。西安交通大学的郑南宁等人通过利用Svm分类器来对行人进行识别,对人体特征的提取采用稀疏Gabor,取得的特征用于对Svm分类器进行训练,然后用得到了判别参数即训练好的Svm分类器对检测图像遍历检测,标出所有满足人体特征的区域。这种方法具有很高的检测正确率,但速度过低。
1.2.2 目标跟踪国内外研究现状
目前,国内外学者已经提出了许多种跟踪算法及实现的跟踪系统,按照其跟踪依据不同有多种分类。如按跟踪对象分类可以分为车辆跟踪、人体跟踪或人体部分跟踪;按目标数量分类可以分为单目跟踪和多目跟踪;按跟踪视角分类可分为单一视角、多视角和全方位视角。通常目标跟踪面临几大难点:刚性形变,光照,尺度变换,分辨率低和区分度低等。
在目标跟踪这一块大致可分为两类:生成模型类和判别模型类。其中生成模型类是通过在当前帧对目标区域进行特征提取,并在下一帧中寻找与目标特征近似的区域作为候选目标区域,例如卡尔曼滤波、粒子滤波、mean-shift等。而判别模型类是通过当前帧把目标区域作为为正样本,背景区域为负样本,通过采集大量正负样本的特征给分类器识别,让其分别记住正样本的特征和负样本的特征,再用这个分类器对测试图进行判别识别。现在的目标跟踪研究领域中最为出色的当数相关滤波类方法和深度学习。由Henriques J F提出的KCF[3]在当时充分展示了相关滤波的潜力,它作为CSK算法的多通道特征改进算法,效果更加理想,速度虽然变慢,但依旧是高速跟踪。同样作为CSK基础上改进的CN算法是Martin Danelljan提出的,它在CSK的基础上扩展了多通道颜色,取得了不错的效果。
1.3 本文主要研究内容与结构安排
1.3.1 主要研究内容
本文主要研究智能辅助驾驶中的行人检测与跟踪算法,主要从行人检测算法优选,基于轮廓线索的C4行人检测算法,相关滤波算法KCF,检测算法与跟踪算法的融合及实现等方面进行研究。
(1)行人检测算法优选。主要研究Hog Svm行人检测、Haar Adaboost行人检测以及基于轮廓线索C4的行人检测,并从测试效果图及实时性评估三种检测算法的性能。
(2)基于轮廓线索的C4行人检测算法。主要研究CENTRISTA视觉描述符、 Sobel的计算、积分图像的计算、两级SVM快速检测,并在数据集上对其检测时间,检测正确率进性测试。
以上是毕业论文大纲或资料介绍,该课题完整毕业论文、开题报告、任务书、程序设计、图纸设计等资料请添加微信获取,微信号:bysjorg。
相关图片展示: