高速公路交通风险智慧预警理论与方法开题报告
2020-04-08 13:19:38
1. 研究目的与意义(文献综述)
| 1.1 研究目的 截止2017年,全国高速公路通车里程突破13万千米,居世界第一位,已经完成高速公路规划里程的95%以上。然而,随着高速公路交通量激增,交通事故的总量高位徘徊并且严重程度逐年增加。据统计,十年间我国高速公路死亡人数年均增长率达到19.9%,受伤人数年均增长率达到10.9%,死伤人数分别增长了2.8倍和2.0倍。交通事故每死亡11人便有1人死于高速公路,伤亡人数占公路交通事故比例仍逐年提高,高速公路的致死率比国道高出15.4%。为了改善以上问题,国内外很多城市都出台相应政策和采取应对措施。美国各州大力建设高速公路管理系统,包括马里兰州CHART项目、亚特兰大NAVIGATOR项目、明尼苏达州DIVERT项目等,事件管理子系统作为管理系统的核心,通过有效减少事件检测和确认的时间,采取合理的响应措施;国内各省市均提出建设“智慧高速公路”的意见,目前在公路交通信息化和收费电子化方面已取得实质性进展。北京、上海等试点城市已开始配备高速公路交通流检测系统和监视设备,同时全国14省市高速公路ETC正式联网运行,京津冀和长三角地区正逐步展开跨省区的收费系统的建设。 现阶段,很多城市充分运用智能交通系统新技术,搭建高速公路管理系统,推进高速公路信息化和智能化。一方面,管理系统能有效控制交通事故态势的恶化,降低已发生事故对人身财产损失,避免二次事故的发生;另一方面,能减少交通延误,缓解交通拥堵,及时疏导交通流。因此,这种对突发事件快速响应以降低事故危害性的途径,其必要性是毋庸置疑的。但是这仍然无法从根源上阻止高速公路交通事故的发生,在交通风险较高的交通状态下主动响应和预防。 因此,针对高速公路交通风险预警理论与方法的研究势在必行。通过联系交通事故的发生与当前交通状态之间的关系,寻找一种评价高速公路交通风险的方法,在预知交通风险较高时消除交通安全隐患。本次研究将研究视角从“被动降低损失”转变为“主动提前预防”,基于高速公路信息化所积累的丰富交通数据,从“智慧信息”向“智慧决策”迈进,针对性提出有效减少事故数量和降低事故严重性的策略和方法。 1.2 研究意义 1) 提前预防交通事故发生。高速公路交通事故发生的原因有很多,包括驾驶员判断错误、车辆故障、交通拥堵、恶劣天气等。预警系统通过对交通状态的判断并预知事故的发生,及时做出反应以消除交通风险。 2) 协助管理人员做出合理决策。管理人员可以通过闭路监控获取实时道路交通信息,对当前交通状态和事故风险进行评估,但是这种评价方式具有模糊性和经验性,另外管理者难以统筹管理多种来源的数据,制定综合性的决策。应用现阶段成熟的大数据技术和机器学习算法,能让决策科学化、定量化和系统化。 3) 引导和控制驾驶员的安全行车。驾驶员可以结合交警发布的风险等级和管控措施,在交通风险高的时期,能选择合适的行车路线,提高行车的警惕性,规避潜在的交通安全事故。 1.3 国内外研究现状 针对高速公路的交通风险智慧预警,国内外学者已进行深入研究,一般的研究思路如下:获取高速公路历年交通运行状态和交通事故数据库,提取影响高速公路的主要因素,选择适合的数学模型建立高速公路交通事故与预测因子的关系模型,应用于管理人员的实时智慧决策方案,下面将分为这四个部分叙述: 交通数据方面,获得数量多、监测变量多、精度高的连续观测数据是研究的重要基础,以全面展示研究区域的交通状态,有利于自学习模型的训练和验证。Franco Basso(2018)选用精度较高的AVI(Automatic Vehicle Identification,车辆自动识别)数据,因为常用的环形线圈车辆检测器存在24%到29%之间的错误率(行驶速度和车辆类型识别错误),识别精度很低[1]。Qi Shi(2009)收集到在美国奥兰多高速公路上微波车辆检测系统(MVDS,Microwave VehicleDetection System)的监测数据,该系统拥有275个检测器,覆盖75英里的高速网络,平均不到1英里就有一个检测器,每分钟能获得每条车道丰富的交通流信息。如此规模的交通网络、高密度检测器分布和大量数据,令MVDS成为交通大数据的理想来源[2]。Anurag Pande(2007)观察到历史事故数据中追尾和变道所造成的事故在事故报告中信息很少,因为该种类事故没有涉及伤亡,使用这样的数据会使模型变得有局限性,运用分类树等方法能较好弥补缺失事故信息[3]。 模型变量方面,因为导致事故的因素众多并且因素间相互交织影响,与交通事故之间存在复杂关系,需要从大量预测因子集合中挑选子集,满足变量可获得且因子能最大限度完成预测的要求。Moinul Hossian(2012)引入了新变量拥堵系数(CI,Congestion Index),消除速度对道路条件的影响[4]。Jie Sun(2015)仅把行驶速度作为模型变量,有效解决了多余变量造成模型过度拟合和泛化能力不强的难题,同时能降低模型计算和学习复杂度,提高运行能力[5]。Mohamed Abdel-Aty(2004)借鉴了流行病学中的病例对照研究(Case-control Study)方法,把事故事件作为病例组,按照一定数量比例将对应事故的同一时间同一检测器但不同日期的非事故事件作为对照组,探寻交通流变量对事故影响,同时控制其他混淆变量(事故发生的地点和时间等)影响[6]。Zuduo Zheng(2010)推断速度标准差是一个重要变量,结果显示每增加一个单位的速度标准差,发生追尾事故的可能性就会增加8%[7];Zhibin Li(2013)将整体的交通状态根据上下游的速度划分为自由流、阻塞流、疏散流和集结流,结论是在自由流的交通状态中速度标准差变量影响更大,在集结流中速度变化系数变量更加重要,在阻塞流和疏散流中两者都显著[8]。 模型方面,大致可以分为统计模型和机器学习模型,前者一般为分类树,Logistic回归等模型,后者有支持向量机(SVM,Support Vector Machine)、随机森林(RF,Random Forest)、神经网络(Neutral Network)、贝叶斯网络(BN, Bayesian Network)等模型。Rongjie Yu(2013)认为在先前的研究中Logistic回归模型应用存在共线性问题,神经网络模型有过度拟合的缺点,另外也忽略了模型的泛化能力,只关注于参数估计[9]。Franco Basso(2018)发现前人训练模型所选用的都是平衡数据集,不符合交通事件中事故事件比例小的实际情况,建立SVM和Logistic模型过程中应用了SMOTE(Synthetic Minority Over-samplingTechnique)技巧可以实现非平衡数据集的训练[1]。Moinul Hossian(2012)使用了BN模型,采用父节点分离(Parent Divorcing)技巧减少条件概率的数量,降低计算复杂度[4]。李康(2017)将收集到的高速公路交通事故按照车辆类型分类:客车事故、客车与货车事故、货车事故,分别建立三个贝叶斯网络,以探索不同车辆类别对潜在交通事故的影响,在评价模型时引入了五项指标:正确率、灵敏度、特异度、敏感性和特异性调和平均值(HMSS)指标,并应用ROC曲线对其分类效果的评价[10]。Chengcheng Xu(2013)应用遗传编程(Genetic Programming,GP)进行实时交通事故预测,区别于其他人工智能算法GP算法消除了“黑盒”效应,即模型具有可解释性,也没有具体的函数形式,基于训练数据能逼近任意函数[11]。Jian Sun(2014)对比了Logistic回归、贝叶斯网络、朴素贝叶斯、K-最邻近、向后传播神经网络和支持向量机这六个分类模型预测交通事故的发生,其中支持向量机达到接近80%的最高准确率[12]。 决策方案方面,尚无系统化的智慧预警机制建立,但特殊路段和恶劣天气等方向已有专门的预警决策方案。肖殿良(2017)基于制定的桥隧群路段车速和车距控制标准,建立了山区高速公路桥隧群运行风险实时预警系统,实现了桥隧群路段行车风险控制、交通流协调与应急处理的信息化[13]。徐秀芹(2009)基于交通事故影响区的划分:提前警示区、过渡区、合(分)流区、缓冲保护区,建立高速公路二次交通数据预警系统,及时向外发布五个危险度:正常情况、一般预警、较重预警、严重预警和特别严重预警[14]。高晨阳(2013)基于贝叶斯网络对高速公路交通突发事件的态势评估和预警,通过GeNie2.0软件实现实时网络推理,得到拥堵时间、受污染面积、伤亡人数等重要指标,协助管理人员对突发事件态势的把握和控制[15]。 综上所述,国内外研究人员通过应用众多交通大数据技术和机器学习算法,并且剖析高速公路交通事故的特性,巧妙利用了近似算法并且验证模型的鲁棒性,显著提升了高速公路交通风险评价问题的预测水平。 然而,现状研究仍存在几点不足:交通风险等级未与实际的措施相挂钩,没有基于交通风险评价模型应用于高速公路运营管理人员的实际决策之中;挑选模型仅以预测精度为目标进而采用具有“黑箱”效应的智能算法,但是实际中可解释模型会更加实用;大多研究忽视了高速公路事故的严重性,将一个事故预测为非事故的情况比将一个非事故预测为事故严重的多,即用传统的均方误差作为模型的损失函数并不合适。 |
2. 研究的基本内容与方案
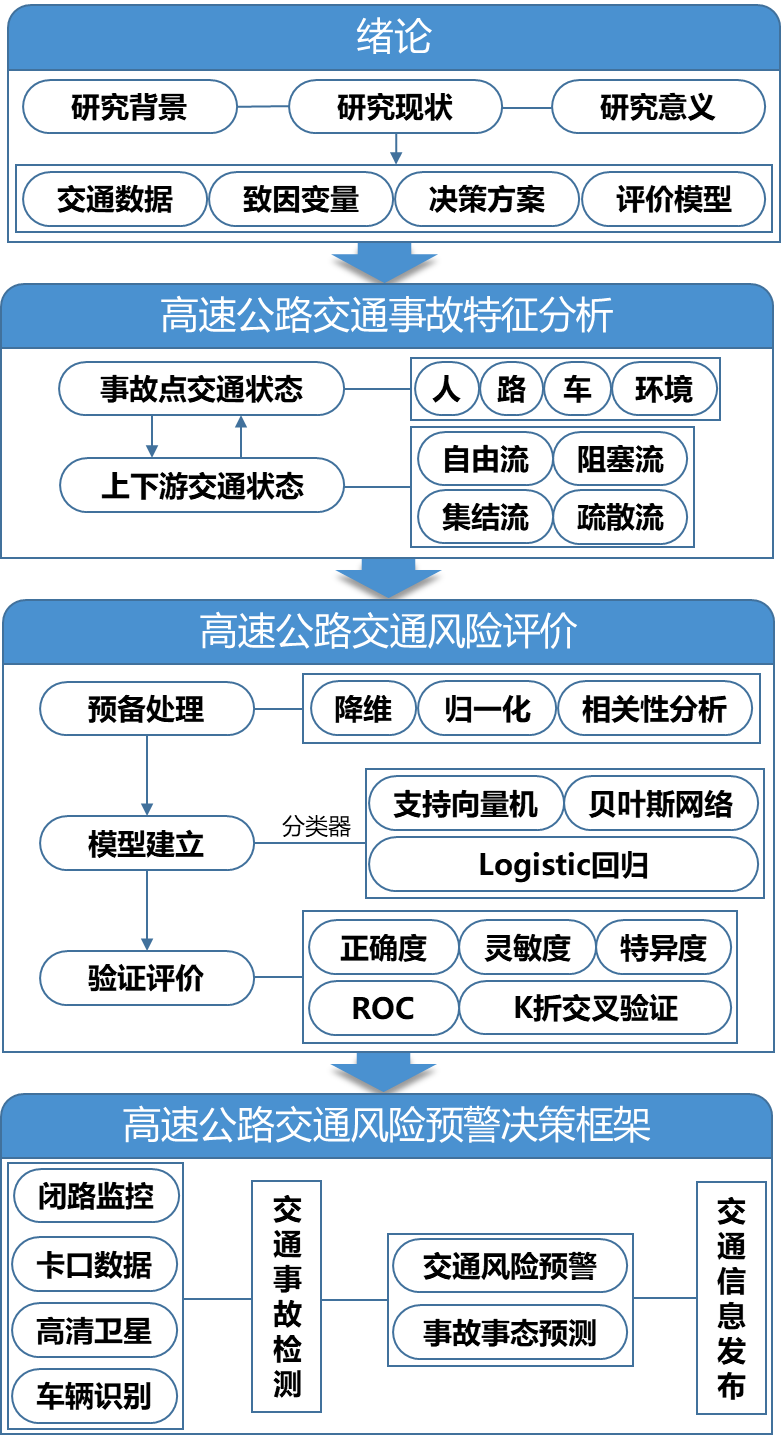
| 2.1 研究目标 1) 以某一高速网络为研究对象,分析高速公路交通事故的特性,明确交通风险与交通事故之间的关系。 2) 从中观层面建立高速公路交通风险安全评价模型,经过多模型对比和鲁棒性检验以保证预测结果的有效性。 3) 提出针对高速公路的多功能、一体化实时交通风险预警机制,形成基于科学、可靠、实时的高速公路交通事故风险指数的事故预警整套方案。 2.2 研究内容 1) 获取高速公路交通事故基础资料和对应交通流信息,统计高速公路交通事故特别是重特大交通事故的分布规律,分析高速公路交通系统中人、车、道路、环境因素对事故的影响,探究从交通风险到交通事故的演化机理。 2) 结合高速公路交通事故特点挑选影响因素的候选特征集,进行数据预处理后识别交通事故的重要因素。应用多种自学习分类器,以筛选后的交通事故特征集为输入,以发生交通事故概率即交通风险值为输出,建立高速公路交通风险评价模型,分析其预测精度和模型泛化能力,构建验证模型的指标体系。 3) 高速公路交通风险预警系统方案遵循“采集-评价-发布”决策逻辑顺序。首先,信息采集系统获取实时路况情况,有机整合采集的动态和静态数据。接着,交通数据传递给风险评价系统,基于高速公路交通风险评价模型划分交通风险等级并且与动态预警准则进行匹配。最后,借助信息发布子系统发布预警信息和应对措施。 2.3 拟解决关键问题 建立高速公路交通风险评价模型 2.4 研究方法 结合理论联系实际、定性与定量相结合和系统科学的方法,研究过程中主要采用以下方法: 1) 总体上论文研究运用定性和定量相结合的方法,对研究问题进行分析; 2) 采用数理统计方法分析高速公路交通事故特征,利用交通工程学原理探寻交通风险的演化机理和交通事故的影响因子; 3) 应用交通大数据技术和机器学习算法,调用Python中Tensor Flow第三方库,实现高速公路交通风险评价; 4) 分析ROC曲线确定分类阈值来划分预警等级,借鉴GIS地理信息系统结构搭建高速公路交通风险预警决策框架。 2.5 技术路线
图2.1 技术路线图
|
3. 研究计划与安排
| 1) 2018年1月,查阅相关文献及调研资料整理 2) 2018年2月,完成开题报告 3) 2018年3月,形成论文体系框架,确定采用的理论与方法 4) 2018年4月,完成论文初稿 5) 2018年5月,修改完善论文内容,交送导师审查 6) 2018年6月,完成毕业论文答辩 |
4. 参考文献(12篇以上)
| [1] Basso F, Basso L J, Bravo F, et al. Real-time crashprediction in an urban expressway using disaggregated data[J]. TransportationResearch Part C: Emerging Technologies, 2018, 86: 202-219. [2] Shi Q, Abdel-Aty M. Big data applications inreal-time traffic operation and safety monitoring and improvement on urbanexpressways[J]. Transportation Research Part C: Emerging Technologies, 2015,58: 380-394. [3] Pande A, Abdel-Aty M. Multiple-model framework forassessment of real-time crash risk[J]. Transportation Research Record:Journal of the Transportation Research Board, 2007 (2019): 99-107. [4] Hossain M, Muromachi Y. A Bayesian network basedframework for real-time crash prediction on the basic freeway segments of urbanexpressways[J]. Accident Analysis amp; Prevention, 2012, 45: 373-381. [5] Sun J, Sun J. A dynamic Bayesian network model forreal-time crash prediction using traffic speed conditions data[J].Transportation Research Part C: Emerging Technologies, 2015, 54: 176-186. [6] Abdel-Aty M, Uddin N, Pande A, et al. Predictingfreeway crashes from loop detector data by matched case-control logisticregression[J]. Transportation Research Record: Journal of the TransportationResearch Board, 2004 (1897): 88-95. [7] Zheng Z, Ahn S, Monsere C M. Impact of trafficoscillations on freeway crash occurrences[J]. Accident Analysis amp;Prevention, 2010, 42(2): 626-636. [8] Li Z, Wang W, Chen R, et al. Evaluation of theimpacts of speed variation on freeway traffic collisions in various trafficstates[J]. Traffic injury prevention, 2013, 14(8): 861-866. [9] Yu R, Abdel-Aty M. Utilizing support vector machinein real-time crash risk evaluation[J]. Accident Analysis amp; Prevention,2013, 51: 252-259. [10] 李康. 基于贝叶斯网络的高速公路交通事故研究[D].北京:北京交通大学,2017. [11] Xu C, Wang W, Liu P. A genetic programming modelfor real-time crash prediction on freeways[J]. IEEE Transactions onIntelligent Transportation Systems, 2013, 14(2): 574-586. [12] Sun J, Sun J, Chen P. Use of support vectormachine models for real-time prediction of crash risk on urbanexpressways[J]. Transportation Research Record: Journal of the TransportationResearch Board, 2014 (2432): 91-98. [13] 肖殿良,郭忠印,周子楚,方勇.山区高速公路桥隧群运行风险预警系统[J].公路,2017,62(11):168-173. [14] 徐秀芹. 高速公路交通事故预警系统研究[D].长安大学,2009. [15] 高晨阳. 贝叶斯网络下的高速公路交通突发事件态势评估研究[D].长安大学,2013. |



