最少拍计算机控制系统的设计方法研究毕业论文
2020-04-06 11:08:31
摘 要
Abstract 4
第1章 绪论 5
1.1 研究目的及意义 5
1.2 国内外研究现状 7
第2章 计算机的采样过程 9
第3章 基于最小拍的计算机控制试验 11
第4章 电力系统上的应用 28
4.1 对象模型状态方程式 29
4.1.1连续对象模型 29
4.1.2连续对象模型的离散化 31
4.2最小拍控制器的设计 32
4.2.1积分增益常量和状态反馈增益矩阵的决定 32
4.2.2最小拍响应的状态监测器的设计 33
4.2.3状态监测器 33
第5章 结论 39
参考文献 40
致谢 42
摘要
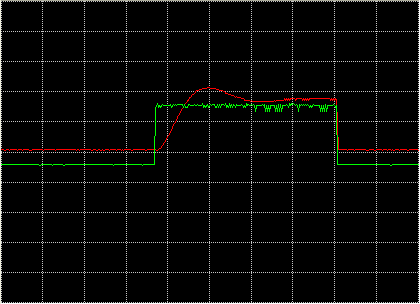
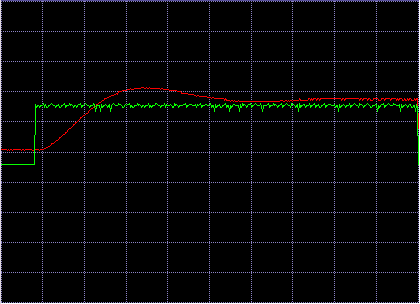
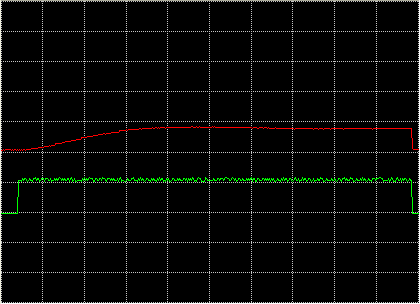
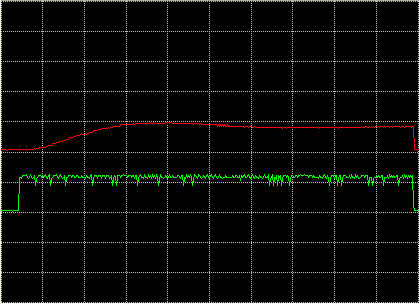
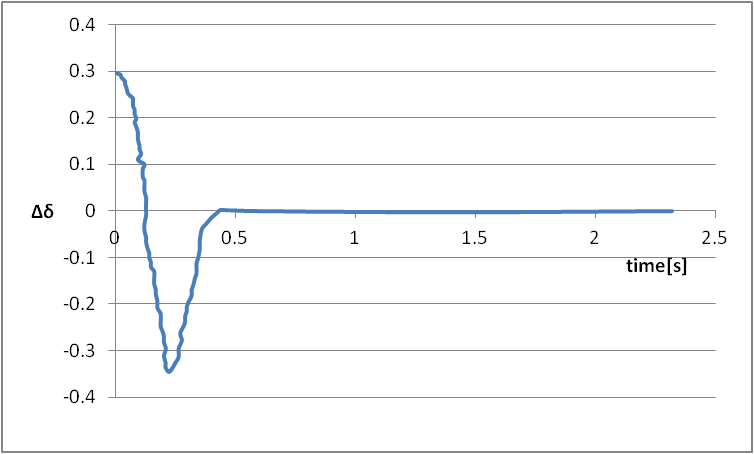
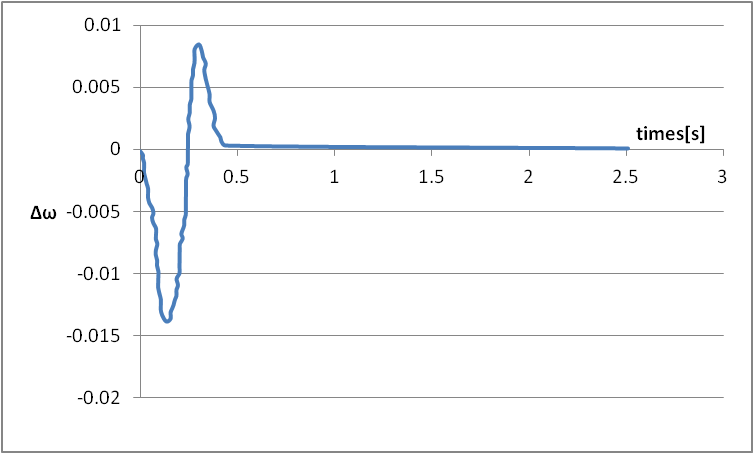
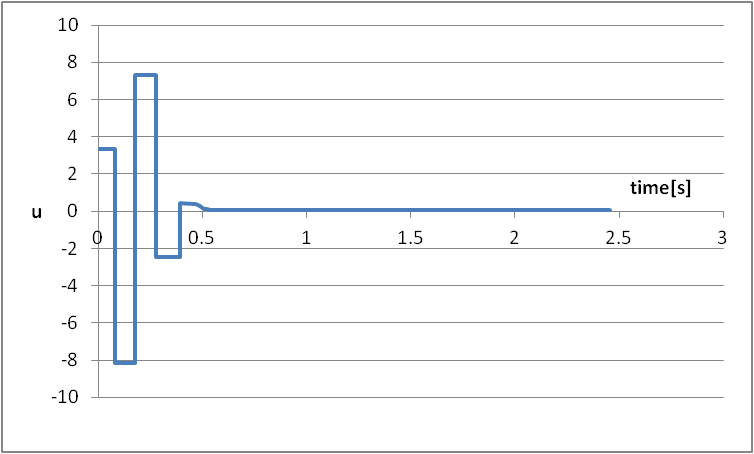
本文对最小拍系统进行了研究。在典型的输入作用下,最小拍系统是指使系统的输出的稳态误差为零。因此我们可以理解最少拍控制系统为拍数最少的跟随系统。判断此系统的最重要的一个方法就是看它的调节时间,非常短。所以最重要的指标有两个,一个是快速性,另一个则是准确性。目前在工业上的自动化控制中大量使用。我们搭建了最小拍实验台,并且做了实际系统实验,得到了相应的输出波形,验证了我们的想法。我们不断的对模型进行了改善,逐步完善最小拍系统的控制。并且阐述了其在电力系统中的应用。
关键字:最小拍,Z变换,电力系统,振荡,输出响应
Abstract
This paper This paper studies the minimum beat system. Under the typical input action, the minimum beat system means that the steady-state error of the output of the system is zero. Therefore, we can understand that the minimum beat control system is the following system with the lowest number of beats. One of the most important ways to judge this system is to look at its adjustment time, which is very short. So there are two most important indicators, one is rapidity and the other is accuracy. It is currently used extensively in industrial automation. We built the minimum beat test bench, and made actual system experiments, and obtained the corresponding output waveforms, which validated our ideas. We have continuously improved the model and gradually improved the control of the minimum beat system. And expounded its application in the power system.
Key Words: Dead beat, z-transform, electric power system, oscillation, output
第1章 绪论
1.1 研究目的及意义
随着我们国家国力的不断发展,科技技术的不断提高,,并且以计算机控制系统为主要手段应用于各行各业中,实现了高度的集成化,促进了我国工业化水平。对于高电压远距离与巨型发电厂的需求量是与日俱增,电网也不像以前那样简简单单,它们之间的连接不断地密切,复杂了许多。各地区的电网安全产出是一个巨大、高级、变化多端,且实践性很强的工程,并且需要坚实的理论知识。我们国家的人民生活条件不断地改善以及社会经济的迅速发展,我们对于用电的要求更多,比如更实惠、更简便、更好,落在电网企业管理人员肩上的胆子越来越重,他们必须技术创新,并且科学化管理,以保证工作人员与用电人员以及相关设备的安全。
2003.8.14以北美五大湖为中心的地域发生大面积停电事故,造成持续停电29h,约有5000万人受到了影响,其造成的经济损失不计其数;2003年下半年英国伦敦大面积停电,北欧大停电,意大利也出现了类似的问题,其中英国伦敦失去的负荷约为整个伦敦的20%。2005年5.23俄罗斯电网发生了一系列故障引起了15~20亿美元直接经济损失。我国在2005.9.26和2008.1分别受到了台风和大雪冰冻天气的影响造成了海南和南方大面积停电事故。2012年7月30日,印度遭遇大面积停电,逾3.7亿人受到影响。31日,在印度北部恢复供电数小时后,该国东部和北部地区13个邦又陷入电力瘫痪状态,全国近一半地区的供电出现中断,影响约6亿人口用电。其中的问题有许许多多,直接的,简介的,表面的,设备的,深层的,人为的等等多方面,并且许多又是他们的问题叠加所造成的。
低频率振荡对于电网系统的稳定工作造成了不小的困难。对于这个问题,电力系统稳定化装置在电力系统振荡问题中起到了抑制的作用,但是减弱了振荡的同时,工作量也大大的提高了不少,而且其中的整定工作也出现了不小的危险性的事故。
最小拍控制装置是根据控制系统的性能参数的约束和其他的要求条件选择闭环脉冲传递函数,使闭环系统在有信号输入作用下,经由最少采样的周期后稳态误差几乎不存在。然后根据被控对象的脉冲传递函数以及闭环脉冲传递函数来决定数字控制装置的一种方法。简单地说,就是在输入条件下,调节时间最短。
1966年第一台电力系统控制器投入了工作。前苏联早期使用的是励磁调节器,虽然有稳定电力系统的作用,但是还没有电力系统稳定的概念。之后美国与日本相继投入了使用,加拿大方面也重视了此方面,建立了参数数据库。我国电力系统基础比较单薄,并且是不是发生低频率震荡的事情。我国的现状是测量难度大,并且伴有反调现象,难以消除噪音;参数调整过程复杂,即使通过长时间的参数调整,也不能保证各个频率段都能达到最佳。
电往系统的稳定性可以分为静态稳定、暂态稳定与动态稳定。静态稳定是指电网受到外界较小的因素影响后,不存在非周期性的失位,系统自身还原到初始运行状态的能力。暂态稳定指的电网受到外界较大的因素影响后,每个发电机继续工作并过渡到新的或还原到原本安全工作状态的能力,在这里,我们通常指的第一步骤和第二步骤。电网动态稳定是指系统受到外界因素影响后,没有因持续变大的振荡而失位。我们指出丢失暂态稳定时系统是不可能有周期性振荡的,要么就是失位然后就是切掉机器,扔掉负荷。现代电网系统一大部分是超大型的互联电力系统,这就引起了假如系统中某个大型电厂从系统中断开,就会引起一系列连锁反应、如线路电流过大、一系列除去负荷(有些还是关键的负荷)的动作、发电机由电网解链等。最惨重的甚至引起大区域的大停电,海南停电大灾难就是最有说服力的一个例子。
电网系统短暂性稳定指的是正常工作状态下的电网系统受到较小的外界干扰因素不招致周期性振荡或者失位之后一段时间内自动还原到最初始工作状态的本领。
发电机如果失位很有可能引起大容量机组突然切掉负荷,某个或某些联络线断开,招致系统的功率急剧不平衡,引起很多的连锁反应,危害全部系统稳定
假如发生周期性振荡除影响输出电能品质、减少发电机工作寿命外还很有可能引起继电保护器的误工作。
电网系统是一个构造复杂的巨型系统。电网系统的平稳运行对于保证国民经济的安全运转意义巨大。先认识电力系统稳定性的重要性,然后讨论了电力系统运行基本的状态,最后结合电网系统稳定性的基本概念理解了电力系统稳定性的研究要领。
电网系统稳定可以具体地定义为这样一种电力系统特质,即它可以工作于正常运行条件下的平衡状态,并且在受都外界环境因素的影响后能够还原到能够允许的平衡状态,当电网系统中各发电机间不能维持同步时,发电机送出的功率和各系统全部节点的电压及支路的电功率将产生很大幅度的波动,如果不能将电网系统中各发电机间还原同步工作,电网系统将不断的处于失步状态一即电力系统不能保持持续稳定工作状态。所以确保电网系统平稳是电网系统正常工作的重要条件。唯有在维持电力系统平稳的条件下,电网系统才能持续地向用户提供令人满意质量要求的优质电能.电网系统稳定性,按照探究问题的需要会分成不同的类别。一般按照系统丢失稳定性后的物理特性分别为称为功角稳定、频率稳定和电压稳定。
1.2 国内外研究现状
现在电网系统静态稳定解析的办法已经有不少了,特征值分析法是电网系统在受到较小外界因素影响稳定阐述较成熟和普遍采用的办法。特征值分析法是通过状态方程系数的矩阵特征值来分析系统的稳定性。如果状态方程系数的矩阵特征值实部全部都为负的话,说明系统是稳定的,不然,系统是不稳定的对于电力系统稳定性来说。研究时,我们不但对系统是不是稳定感到了兴趣,还有对不稳定的因由和怎样改善系统的稳定性同样也感到了兴趣。特征值法取得了普遍应用的理由是它不仅仅能够对系统的稳定性进行推断,并且还可以获得与系统稳定性相关的许多信息。举例来说的话,特征值的实部告诉了我们震荡模式相关阻尼信息,虚部告诉了我们震荡模式相关频率信息,还有特征向量向我们反应系统状态变量在该震荡形式下介入系统动态的行为信息。这些已经成功的被运用于电网系统静态稳定性评估决定控制器的安置地点,控制器指标优化等各方面。
当今电网系统暂时稳态探究的办法主要两个类别:一个类别是直接法,也称作方式不是由时域中的系统运动轨迹角度去研究稳定问题,而从系统能量及改变的角度去研究稳定问题,所以可以迅速的将系统稳定性进行研究并与时域仿真法相比较,直接法的非常优秀一点是计算能力非常强,可以给出定量的稳定度指标,但是直接法并非也没有不足之处,举例,由于选取复杂模型致使直接法的速度不能够保证,因而模型适应能力方面来讲的话,有不足之处,由于采用粗略的模型,分析以及运算过程中作的近似得到的结果的准确性满足不了要求。最终按照两种方式它们各自的优点缺点,迅速的暂态稳定研究大部分选取两两相结合的方法,在确保准确性的同时尽可能减轻计算负担,提升单位时间内的计算量。另一类就是依据数值积分的时域仿真法,这种方式是经过对描系统的微分方程组和代数方程组使用数值积分的方式取得出系统各状态变量的摆荡轨迹,并且按照各个机组的功角来判定系统的暂态稳定性,是现在电网系统暂态稳定研究最可靠准确的方式。这种方式的最突出好处在于它可以推敲很多种非常复杂的模型和其他操作,可以适应规模巨大的电网系统。虽然计算的精度很高,解析事实可靠,但是因为不能给到仿真停止的命令,按照摆荡曲线断定系统的稳定性须要的计算时间很长,导致计算速度差。励磁系统改善电网系统的稳定大部分是改善电压的稳定,然后是改善功角稳定。改善暂态稳定性分两种方式:1)减少加速面积:尽快将故障切除;2)增加减速面积:增大励磁电压响应比;提高强勋电压的倍数.则解除故障之后的电机内电动势 Eq 飞快上升,增大功率输出,致使增大减速面积。励磁顶数值电压越大.电压反应的速度越快,励磁调整对于改善暂态稳定的成效也就越高,但是也有不好一面的影响,而且会越大。无误的方法是在保证励磁可靠性的前提下,提出提高励磁强励的倍数。
变压器电抗扮演了非常重要的角色在电力系统。特别是有些电机电抗的阻值比较小并且输电的线路已经过了运用,这些方法来降低它的电抗之后的超高压输电系统。经过减小变压器的电抗阻值,对于改善电网系统的稳定性可以说贡献是巨大的。目前在那些超高压的远距离输电系统中,已普遍使用了自耦变压器。因为它不仅节约用料,而且价位也合理很多,并且它的电抗阻值也较小,所以对于改善电力系统的稳定性有着巨大的功效。自然在使用自耦变压器的时必须要引起注意。举例来说,就是增设了继电保护和增大短路的电流与调整压力的各种难题。在改善电网系统稳定性作出的另一项非常重要的另一项技术称之为灵活交流输电系统.灵活交流输电系统作为一个新颖的技术,获得了各个国电网系统和研究机构的不同寻常的关注。灵活交流输电装置很多依据大功率可控硅技术。其中有:静止无功的补偿器、静止同步的补偿器、可控硅控制串联的补偿器、统一潮流的装置等。在电网系统里,倘若无功存储不够会招致电网电压水平下降,冲击性无功的功率负荷还可能会招致电压出现强烈的振荡,降低电潮的供应的电的品质.我们国家电潮的建造和工作中一直存在的一个难题是无功补偿的容量不够和不合理的配备,尤其是可变的无功容量的不足,迅速反应的无功调整装备少之又少。最近,伴随着大功率的非线性负荷持续加多,电力系统的无功冲击与谐波污染表现为持续上升的走向,无功调动方式的匮乏招致母线电压伴随着工作方式的变更不小,致使电力系统尤其是配电系统的线路损坏加多、电压合格率减小。对于一种改善电压稳定性的实惠、灵验的办法可以说动态无功补偿技术是当之无愧了,动态无功补偿技术从生活上满足了复杂电网的客观需要,也就是安全稳定战略防御的,因为它的能力完全可以改善西边的电输送到东边时的远距离能力和受端系统电压的稳定性为非常重要的步骤的变电站供应动态无功支撑,达到电压稳定性的大幅度提高和配电网电能品质的改善的全方位指标的目标,提高系统的动态以及静态质量。
伴随着科学的进步,改善电网系统稳定性的方式需求不断地升级。落后的单一装置的调整已经不能达到现代电网系统的控制目的了。电网系统的暂态稳定控制中,多种装置之间的相互配合负责就显得格外迫切,本文系统地探究了电网系统稳定的最小拍稳定调整方式,要满足电网系统按照自己的特性有选择的去使用,改善电网系统稳定,为全国人打造稳定的电力系统。
自动控制系统涉及的理论比较抽象,晦涩难懂,还需要大量的计算和公式的推导,所以需要MATLAB的仿真
第2章 计算机的采样过程
r(t)
R(z)
e(t)
T
e*(t)
E(z)
D(z)
T
u*(t)
U(z)
ZOH
G0(s)
y(t)
Y(z)
G(z)
﹣
图1 计算机控制系统结构简化框图
日常生活中使用的计算机无论是输出还是输入都是数字信号、数字量。所以,我们通过传感器采集到的连续信号就有必要通过A/D转换转变为计算机能够识别的离散数字量信号,这样我们的计算机才能够识别并且按照我们的指令去进行大量的运算;反之必然,计算机想要反馈给我们的输出量,我们也是识别不出来的,有必要通过D/A转换器和保持器将离散的信号转换成控制需要的输入,也就是连续信号。
其中
r(t) —— 输入信号
e(t) —— 误差信号
y(t) —— 输出信号
e*(t)——采样后误差模拟信号
u*(t)——离散的控制模拟信号
系统动态特性的确定来源于采样器、保持器和数字控制器的内部构造和它们的工作规律,这是重点也是难点。整个系统的稳态控制精度的唯一影响因素就是A/D、D/A转换器的分辨率。这表示A/D和D/A转换器对于动态指标来说根本没有作用,只作用于系统稳态控制精度。通常将复杂的问题简单化,是我们常用的手段,这次我们将系统的动态特性单独拎出来,只看它。为了将这个问题转化为数学模型,便于我们计算与分析,在研究和策画整个系统的时候,可以假设装置A/D、D/A转换器的精度无限大,大的可以将忽略一些误差,所以现在可以得出结论,用于数学上分析时A/D、D/A转换器是存在的必要了,但是不能够忽略它的物理意义。信息的脉冲序列或者数字序列的传递形式是在计算机控制系统中,我们把连续信号变成数字序列的过程叫作采样过程,采样过程中涉及的设备我们称之为采样开关。
对随着时间不断变化的模拟量进行采样的计算机是利用定时器控制的开关,每隔一定时间使开关闭合而完成一次采样。开关每隔一段时间闭合的情况我们称之为周期,这一段时间为采样周期。其实将采样过程简单来讲就是:将输入信号的连续性,通过采样开关之后,变成在采样时刻0,T,2T,…,nT间断的一连串脉冲信号。在试验中我们可以认为,采样开关闭合的时间为零,断开的动作时间也为零。采样开关是常开的,我们输入一段连续的信号f(t),通过采样开关,我们得到的输出信号为f*(t)。
前面说到的理想采样开关在现实生活中是不存在的,但是随着技术的发展采样开关已经都是电子的了,其好处就在于从断开到闭合或者从闭合到断开的时间都远远比两次采样之间的时间间隔小,对于被控对象的时间常数就更不用说了,所以说采样开关简单化为理想开关也是没有问题的,并且有益于整个系统的研究。连续信号f(t)、脉冲序列f*(t)、采样周期T。如果采样开关的动作时间接近为零,那么采样信号f*(t)就是f(t)在闭合开关的瞬间值,即脉冲序列f(0),f(T),f(2T),…,f(kT),…
第3章 基于最小拍的计算机控制试验
Q
P
B4OUT
R
C
10k
10k
-
10k
A
-
10k
10k
B
A/D转换
E
IN6
运算环节
D/A转换
100K
-
OUT2
R1
300k
-
3u
2u
D
C
300K
图2 最小拍有波纹系统构成

图3 实验台搭建模型
搭接模拟信号:信号发生器U 单元的输出B4OUT作为系统输入R。该单元的KD1置‘阶跃’档(最左端),KD2置‘0.2-6s’档,用‘短路套’将‘TB41’、’TD2’短接,调节调幅电位器使B4OUT输出电压不高于2V,调节调频电位器使B4OUT输出周期为最大。
A单元中的TA11和TA113用“短路套”短接,B单元中的TA26和TA213用“短路套”短接,C单元中的TA33和TA310用“短路套”短接,D单元中的TA48、TA49和TA414用“短路套”短接。
取一只300K电阻跨接在IN3和AOUT3测孔之间;
把U模块的B4OUT测孔连线到A的1H1测孔,A单元的AOUT1测孔连线到B单元的1H2测孔,把B单元的AOUT2测孔连线到Q单元的IN6测孔,把P单元的OUT2测孔连线到C单元的1H3测孔,把C单元的AOUT3测孔连线到电位器单元J单元WHA52的一端WH21,WHA52的另一端WH22连接到D单元的1IN4测孔,D单元的F4测孔连线到B单元的1IN2测孔上。
电位器WHA52的阻值调到300K。
以上是毕业论文大纲或资料介绍,该课题完整毕业论文、开题报告、任务书、程序设计、图纸设计等资料请添加微信获取,微信号:bysjorg。
相关图片展示: