火龙果采摘机机构设计与仿真毕业论文
2020-04-05 10:49:45
摘 要
近年来,随着我国经济的持续发展,人们对水果的需求越来越大,除了对常见水果的需求在不断增长外,对一些季节性强的南方水果的需求也在不断增大,如火龙果。不断增大的市场需求,促使这些水果的种植不断得到推广,种植的果农越来越多,种植面积也迅猛增加。但是,收获劳动力不足,采摘工具机械化程度低,却严重制约着这些水果种植的发展。在火龙果的整个生产过程中,火龙果的采摘过程占了十分巨大的工作量,原来的人工剪刀采摘耗时耗力,需要大量劳动力,增加了劳动力成本,经济效益低,而且火龙果树虽然不高,但是长有许多刺,人工近距离采摘容易伤到工人,被刺划伤,火龙果果实与枝条连接的中心维管束比较硬,往往需要人们从两边工作,才能在尽量不伤到果实和枝条的情况摘下果实,不方便且耗时。为了适应当代果蔬经济的发展,增加水果生产种植的机械化程度,设计了一种手持的火龙果采摘机构。
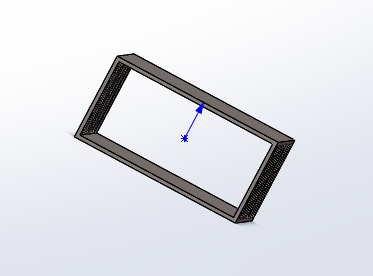
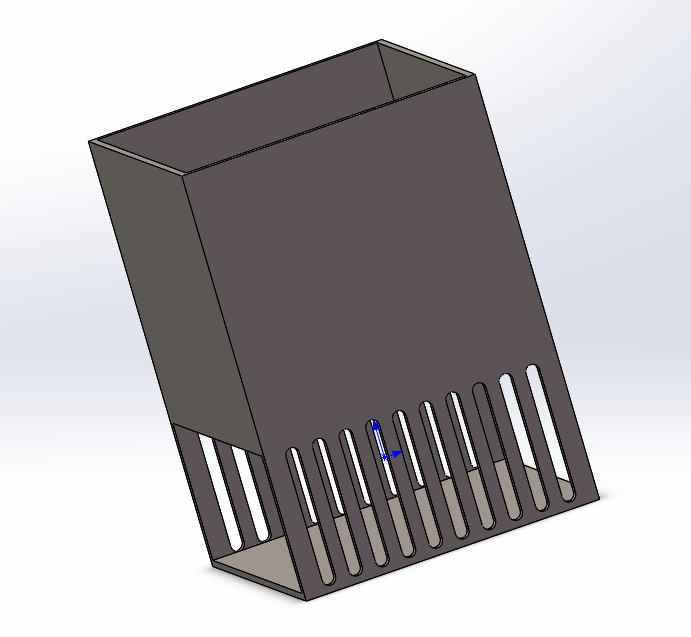
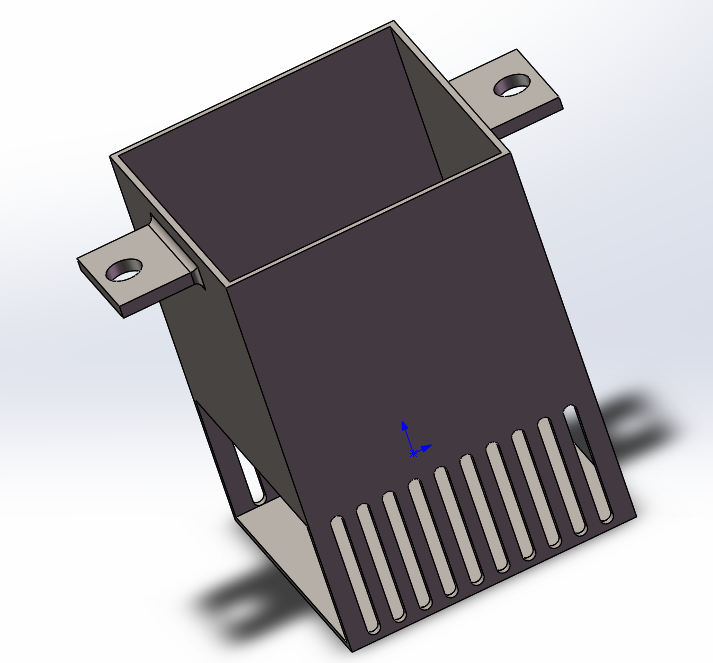
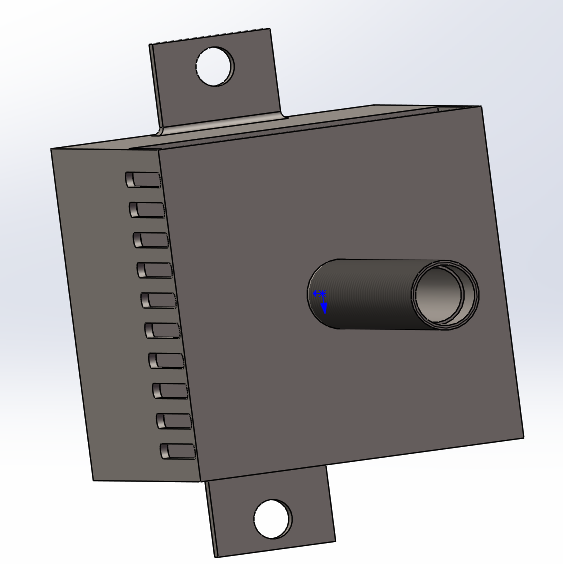
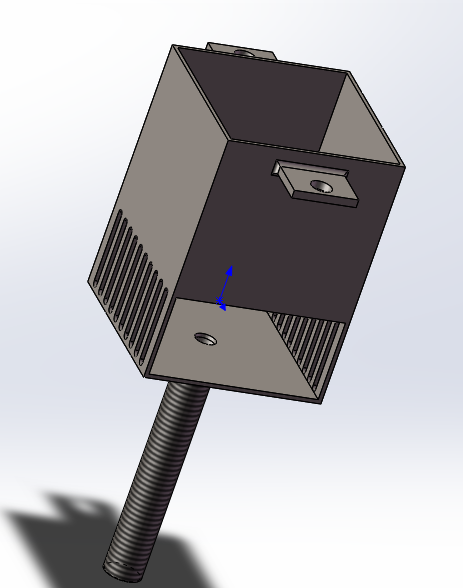
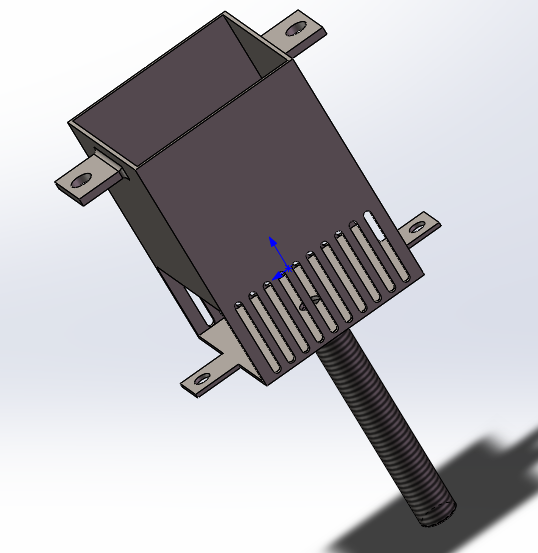
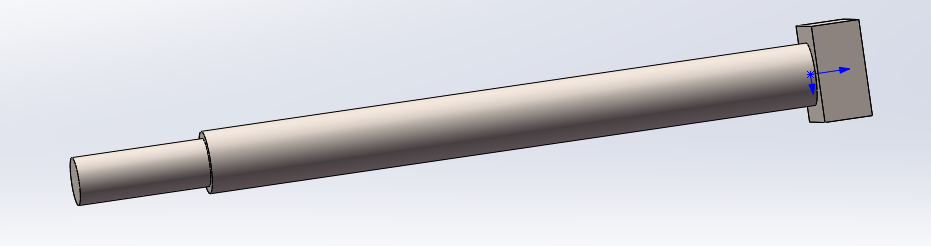
通过对火龙果和火龙果树的调研,确定了整个机构大体的外形尺寸,根据火龙果果实的大小确定了机构回收腔的长宽和深度,根据火龙果树的高度和外形确定了机构的整个长度。该机构通过安装在回收腔上表面的两把刀片向中间旋转实现对果实果茎的剪切,刀片安装固定在旋转轴上,旋转轴上通过键连接套有齿轮,通过齿轮传递旋转运动,两个从动齿轮对称布置在主动齿轮两边,主动齿轮的旋转便可以实现两刀片的相向运动,剪下果实。主动齿轮安装在手杆上,用手旋转手杆便给了剪切机构一个旋转运动。机构上装有把手,握住把手以提起整个机构,把手与机构螺纹连接,通过左右旋转把手可以改变把手的相对位置,调整把手前段的长度,以适应不同高度的果实,方便采摘。确定了设计思路,确定各零件的尺寸,之后用工程软件SolidWorks建模,装配,完成运动仿真。
关键词:火龙果采摘,齿轮传动,建模,运动仿真,SolidWorks
Abstract
In recent years, with the continuous development of China’s economy, people’s demand for fruits is increasing. In addition to the increasing demand for common fruits, the demand for some seasonal fruits of southern China is also increasing. Dragon fruit. The ever-increasing market demand has led to the continuous promotion of the cultivation of these fruits, the growing number of fruit growers, and the rapidly growing cultivation area. However, the lack of harvesting labor and the low degree of mechanization of picking tools have severely restricted the development of these fruit cultivation. During the whole production process of dragon fruit, the process of picking dragon fruit takes a very large amount of work. The original manual scissors picking takes time and effort, requires a lot of labor, increases labor costs, has low economic efficiency, and dragon fruit trees do not It is tall, but it has many stings. Artificially picking at close range can easily injure the workers. The center vascular bundles that connect the dragon fruit and branches are hard to hurt. They often require people to work from both sides in order not to hurt the fruits and The condition of the branches removes the fruit, which is inconvenient and time consuming. In order to adapt to the current economic development of fruits and vegetables and increase the mechanization of fruit production and cultivation, a hand-held dragon fruit picking mechanism was designed.
Through the investigation of dragon fruit and dragon fruit tree, the overall size of the whole body was determined. The length, width and depth of the cavity were determined according to the size of pitaya fruit. The whole length of the mechanism was determined according to the height and shape of the dragon fruit tree. The mechanism realizes the shearing of the fruit stem through the two blades installed on the upper surface of the recycling cavity. The blade is installed and fixed on the rotating shaft. The rotary shaft is connected with a gear through a key and the rotary motion is transmitted through the gear. The driven gears are symmetrically arranged on both sides of the driving gear. The rotation of the driving gear can realize the relative motion of the two blades and cut the fruit. The driving gear is mounted on the hand lever and the hand mechanism is rotated by hand to give the cutting mechanism a rotating motion. The mechanism is equipped with a handle, grips the handle to lift the whole mechanism, the handle is screwed into the mechanism, the relative position of the handle can be changed by rotating the handle left and right, and the length of the front handle is adjusted so as to adapt to different heights of the fruit and facilitate picking. Determined the design ideas, determine the size of the parts, and then use the engineering software SolidWorks modeling, assembly, complete the movement simulation.
Key Words:Dragon fruit picking, gear driving, Modeling, Motion Simulation, SolidWorks.
目录
摘要 I
Abstract II
第一章 绪论 1
1.1课题来源 1
1.2课题研究背景 1
1.3课题研究的意义与目的 2
1.4国内外水果采摘机械研究现状 4
1.4.1国外水果采摘机械研究现状 4
1.4.2国内水果采摘机械研究现状 4
1.5本文主要研究内容 5
第二章 火龙果采摘机构设计与仿真理论研究方案 7
2.1设计方案的确定 7
2.2 SolidWorks建模基本理论 8
2.2.1 SolidWorks建模的基本思路 8
2.2.2 SolidWorks建模的基本步骤 10
2.3 SolidWorks装配及仿真基本理论 10
2.3.1 SolidWorks装配基本思路 10
2.3.2 SolidWorks装配基本步骤 11
2.3.2 SolidWorks运动仿真的思路及步骤 11
2.4本章小结 11
第三章 火龙果采摘机构模型的建立 13
3.1箱体模型的建立 13
3.2 旋转轴的建立 18
3.3手杆模型的建立 19
3.4齿轮模型的建立 20
3.5刀片模型的建立 23
3.6把手模型的建立 25
3.7本章小结 25
第四章 机构模型的装配及仿真 26
4.1伸缩机构的装配及仿真 26
4.1.1伸缩机构的装配 26
4.1.2伸缩机构的仿真 26
4.2整个机构的装配及仿真 27
4.2.1整个机构的装配 27
4.2.2整个机构的仿真 34
4.3本章小结 35
第五章 环境影响及经济性分析 36
5.1环境影响分析 36
5.2经济性分析 36
第六章 结论和展望 38
6.1结论 38
6.2展望 38
参考文献 39
致谢 41
第一章 绪论
1.1课题来源
本课题基于当前国内经济水平有很大提高,人们对于水果量的需求在逐渐增大,特别是火龙果这种水果,在过去不常见,现在巨大的市场在促使火龙果种植的推广,种植面积在迅猛增加,但是,由于采摘过程占了火龙果生产过程的大部分工作量,采摘工具的机械化程度不高,主要靠人工一手持剪刀,一手握住火龙果进行采摘,效率低,而且火龙果树长有很多刺,人工近距离采摘容易被刺划伤。为了解决上述问题,提高采摘效率,保护工人安全,设计了带回收腔的火龙果采摘机构。经过调研之后,设计机构尺寸,并运用SolidWorks建模仿真,设计出该机构。
1.2课题研究背景
火龙果的特点。火龙果为热带水果,喜光耐阴、耐热耐旱。在温暖湿润、光线充足的环境中生长迅速,主要分布在我国的广西、福建、广东、海南、云南等省区。普通的火龙果树高度在1米多,一般不超过1.5米。火龙果树枝条繁多,枝条上长有许多刺,果实生长在枝条的各个方向,果茎硬且短。火龙果果实,呈长圆形,表皮红色,具有卵状而顶端极尖的鳞片,果实直径10-12厘米,果皮厚,有蜡质。果肉为白色或红色,果肉中有许多具有香味的芝麻状种子,故又称为芝麻果。
火龙果以它的营养价值和味道特点越来越受到大众的青睐,市场需求在不断扩大,也致使种植的人越来越多。火龙果属于凉性水果,在自然生长状态下,果实于夏秋季节成熟,果肉味甜多汁。火龙果含有一般水果少有的植物性白蛋白以及花青素,并含有丰富的水溶性膳食纤维和维生素。火龙果不但味道甘甜,还具有很高的营养价值,它集水果、蔬菜、医药的优点于一身。火龙果味道甘甜,营养丰富,主要营养成分有膳食纤维、蛋白质、维生素C、维生素B3、维生素B2、钙、铁、镁、钾等,有丰富的胡萝卜素,果核 (黑色芝麻状的种子)内更含有丰富的钙、磷、铁等矿物质及各种白蛋白、酶、纤维质以及高浓度天然色素花青素。
目前火龙果的采摘需要使用采摘剪将火龙果从植株上剪下。由于火龙果的植株表面分布有微小的刺,工人采摘火龙果时往往需要用手将采摘剪送入到火龙果果实的根部,并且需要摆弄火龙果与植株,以便于剪断根部。这会使得作业人员的手部极易被刺扎到,安全性不高;另外,这样的采摘方式操作十分不方便,导致采摘效率低。火龙果采摘目前机械化程度不高,采摘的工作量几乎占了整个生产过程工作量的40%。虽然水果采摘机构的研究已经进行了几十年,有很多研究成果,但是目前市面上还没有用于火龙果采摘的方便实用的机械装置,本课题旨在通过对火龙果的调研和借鉴现有的研究成果设计一个火龙果采摘的机械装置。该机械装置可以改善采摘作业人员采摘时的安全性,避免被刺划伤,同时提高采摘的工作效率。
SolidWorks软件组件繁多,功能十分强大。 SolidWorks有功能强大、易学易用的特点,能够提供不同的设计方案供用户选择、减少设计过程中的错误以及提高设计质量,独有的拖拽功能够使用户在比较短的时间内,完成大型的装配设计,自带的运动算例功能,可以实现装配好的机构的运动仿真,模拟机构的运动。
1.3课题研究的意义与目的
水果种植业的迅速发展提高了果园采摘机械的市场需求。采摘作业所用劳动力占了整个生产过程所用劳动力的33%~50%,人工成本昂贵,水果的收获采摘是整个生产中最耗时也最费力的一个环节,因为采摘作业比较复杂,季节性又很强,若使用传统人工采摘,不仅效率低、劳动量大,而且容易造成果实的损伤和采摘不及时。使用水果采摘机械不仅可以提高采摘效率,而且可以降低果实损伤率,节省人工成本,提高了果农的经济收入。另一方面,在很多国家随着人口老龄化的加重和农业生产劳动力的减少,劳动力变得不仅成本高,而且还越来越不容易得到。因此提高水果收获的机械化程度变得越来越迫切,发展机械化程度高的收获技术,研究开发水果采摘机械,对于水果种植的发展具有十分重大的意义。研究和开发用于水果收获的机械装置对于解放劳动力、提高生产效率、降低生产中的收获成本、保证水果新鲜品质,以及满足水果生长的实时性要求等方面都有着重要的意义。
水果采摘作业质量的好坏将直接影响到水果的储存、加工和销售,从而最终影响到市场价格和果农的经济效益。火龙果的收获具有很强的时效性,属于典型的劳动密集型工作。但是由于采摘作业环境条件差和操作的复杂性,火龙果采摘的自动化程度仍然很低,目前国内火龙果的采摘作业基本上还是靠作业人员手工完成。随着我国制造业的高速发展和农业机械化普及程度的大幅提高,机械采摘取代手工作业是必然的发展趋势。拥有自主行动功能的技术含量极高的机械类型,价格昂贵,且不适合丘陵地带小型果园,而且火龙果生长方向参差不齐,果茎极短,自动对准果实并实现采摘不易,采摘部分需要多个角度的旋转和伸缩,操作复杂,选中果实要花费大量时间,运用传感器则使得机构复杂,制造成本增加,维护和维修更加困难。所以,本课题设计了一种简单实用的手持火龙果采摘机构,由灵活的人将机构的果实回收腔对准火龙果果实,手动给与主动齿轮相连的手杆扭矩,使主动齿轮旋转,通过齿轮传动使刀片相向转动,快速剪断果实果茎,果实掉进回收腔,实现回收。
通过使用该采摘机构代替近距离的人工剪采摘,首先起到了保护采摘作业人员安全的作用,不会被火龙果树上生长的刺划伤,也保护了果树枝条。在当今日新月异的发展浪潮中,社会生产种类日益多样化。为了适应时代的发展,逐步实现生产的自动化,提高农业机械化水平,各种机械装置会辅助或替代人工劳动力出现在不同的岗位上。随着社会发展,为了更好的管理,促进水果生产的发展,果园生产活动越来越趋于专业化和模块化,这使得要进行长时间的单一重复工作,这不仅容易使人产生疲劳感,还伤害人体健康。用机械装置代替或辅助手工采摘,可以将人从单调的生产活动中解放出来。生产效率是生产活动的重要指标,为了保证生产效率,许多果园管理者会投入大量的人力资源及出台一系列的政策去刺激生产。可是,大量劳动力的投入并不代表着生产效率的提高,而且由于人的作息问题,出台生产政策往往只能短时间内刺激生产,没有从根本上解决问题。而火龙果采摘机构,可以从根本上解决问题,对果实进行快速的定位,剪切及回收,大大提高了采摘效率,同时,采摘质量也得到了保证。
1.4国内外水果采摘机械研究现状
1.4.1国外水果采摘机械研究现状
水果采摘机械的研究是当今农业机械研究的一个热点内容。世界各国为了提高生产率,解放劳动力,进一步提高农业自动化和智能化程度,在这方面都投了大量的人力和物力资源,也取得了一些不错的成就。在美国,德国,韩国,法国,日本等发达国家,随着产业多样化,农业生产工作性质改变的原因,农业生产劳动力不足远比其他行业更严重,为了解决劳动力分散不均匀的问题,保证生产,提高人们的生活质量,各个国家都一直在研究农业采摘机械,也有一些成果。20世纪40年代初期,法国率先研制出人工操作的简易采摘器,40年代中期,美国开始研究振摇式水果采摘机械,用来采摘桃子和杏子等水果;到50年代中期,利用振摇果树的方式收获水果的水果采摘机械在欧美国家得到了巨大发展和普遍应用,出现了用拖拉机驱动的振摇式水果采摘机。20世纪60年代,振摇式采摘机械的结构由单一的定冲程推摇机发展到气力振摇机、惯性式振摇机和使用由动力驱动的橡胶棒撞击果枝振落果实的撞击式振摇机等多种类型的水果采摘机械;60年代中期,美国研发出液压升降平台车,配合水果采摘工具使用,大大提高了采摘效率;70年代出现了各种动力切割式水果采摘机械,例如油锯、气动剪等。比较著名的气动剪厂商有日本的ARS公司,意大利的CAMPAGNOLA公司,瑞士的FELCO公司,其气动剪产品有Star系列和F系列。 日本在20世纪90年代初开始着手研究陡坡地的果园采摘机械化。四国农业试验场研制的采用枢轴式摆动悬挂机构作为行走部分的自走式采摘车,使用无线电和电视控制机控制,能准确行走。该采摘车的重心低,轮距宽,故爬坡能力强;采用就地车轮正反转机构,所以回转能力好;采用枢轴悬挂机构, 因而使机体摆动小、行走平稳,适合在坡度15°~30°的地区使用。
1.4.2国内水果采摘机械研究现状
作为一个果蔬生产大国,我国虽然在农业机械化方面的研究起步晚于发达国家,但是,先天的不足并没有使奋发的国人停滞不前。我国的国家专利中有上百种的水果采摘器,包括机械式、电动式、气动式的果品采摘器,其中有的实现单方向的水果采摘,有的可改变方向能实现全方位的水果采摘。不过目前市场上商品化的采摘器品种还比较单一,且价格昂贵 操作不便。
我国从20世纪70年代开始研究水果采摘机械,先后研制出与手扶拖拉机配套的气囊式采摘器、手持电动采摘器和机械振动式山楂采摘机。20世纪80年代开始,我国开始研究和制造切割型水果采摘器,果园采摘也从作业人员使用剪刀采摘发展到使用机械装置采摘。20世纪90年代开始,市场的需求带动了水果种植的热潮,众多中小种植户的采摘需求带动了简易采摘器市场的发展。其后辅助升降平台,气动剪枝机等机具先后进入了市场。1992年,浙江金华农机所研发出了由拖拉机提供动力的用于水果采摘的升降机,上升高度可达7米。2007年新疆机械研究院研制出了我国第一台多功能水果采摘机,即LG-1型多功能水果采摘机。这是一种集采摘、修剪、喷药、运输等功能的自走式采摘机。该采摘机的研制成功标志着我国果园从单一的采摘机械进入到了多功能采摘机械时代。
以上是毕业论文大纲或资料介绍,该课题完整毕业论文、开题报告、任务书、程序设计、图纸设计等资料请添加微信获取,微信号:bysjorg。
相关图片展示: